 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCritiqueDriveVLM: From Verifier-Guided Reinforcement Learning to Latent Thought Distillation for Autonomous Driving
Jul 05, 2026End-to-end Vision-Language Models (VLMs) show immense potential in autonomous driving. However, standard Supervised Fine-Tuning (SFT) often suffers from reasoning hallucinations and conservative biases. While traditional tool-augmented frameworks and Chain-of-Thought (CoT) approaches mitigate these issues, they incur exorbitant token consumption and unacceptable latency, rendering real-time deployment impractical. To resolve this reliability-efficiency trade-off, we propose CritiqueDriveVLM, a novel unified three-stage framework internalizing reasoning directly into the VLM. First, we introduce Critique-Driven Multi-Turn Reinforcement Learning (RL) guided by a multi-dimensional verifier. By providing granular scalar feedback and a multi-turn penalty, we force the policy to internalize logical deduction, cultivating a robust System-2 Teacher that achieves high accuracy without fragile external tools. Subsequently, we propose Latent Thought Distillation to overcome the latency bottleneck. By aligning the Student's latent representations with the Teacher's fully converged reasoning states, we compress deep logical capabilities into a fast, CoT-free System-1 Student. Extensive experiments on the widely-used DriveLMM-01 benchmark demonstrate remarkable improvements. Compared to the base model, our tool-free Teacher significantly boosts Multiple Choice Quality (MCQ) from 55.54% to a state-of-the-art 76.54%. Crucially, our distilled Student preserves competitive reasoning depth while drastically minimizing generation length to an average of merely 28 tokens. This slashes inference latency by 88% (from 3482 ms to 416 ms), paving a highly robust pathway for low-latency autonomous driving.Our source code is available at https://github.com/MICLAB-BUPT/CritiqueDriveVLM.
Leveraging Metric Depth for Relative Depth Prediction
Jun 09, 2026We present our solution to the 2025 SoccerNet Monocular Depth Estimation Competition Challenge. Predicting the relative depth in football scenarios is challenging, especially with only thousands of training samples available. To address this issue, our method leverages the powerful zero-shot capabilities of models pretrained on large-scale datasets to learn metric depth for effective relative depth prediction, achieving a score of $2.68 \times 10^{-3}$ on the challenge set.
Claude Code-Driving Scenario Mining for the Argoverse 2 Challenge
Jun 08, 2026We present our submission to the CVPR 2026 Argoverse 2 Scenario Mining Challenge. Our system uses a four-stage pipeline: (1) autonomous code generation via a Claude Code agent powered by GLM~5.1, (2) iterative training set screening with Timestamp Balanced Accuracy threshold 0.8 to curate few-shot examples, (3) semantic code review by a separate Claude Code session, and (4) Qwen3-VL scene-level verification to filter false positives. We report results on the Argoverse 2 test set.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
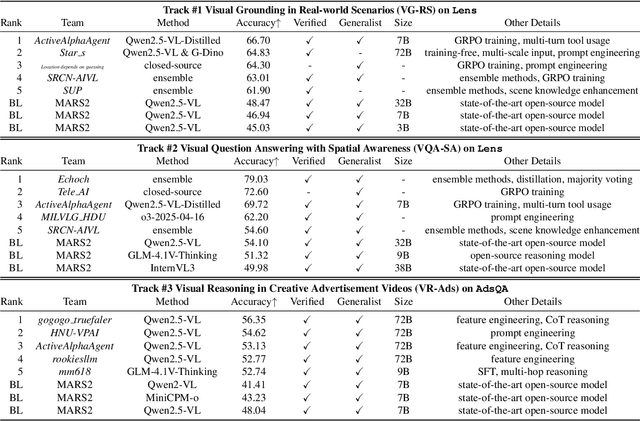

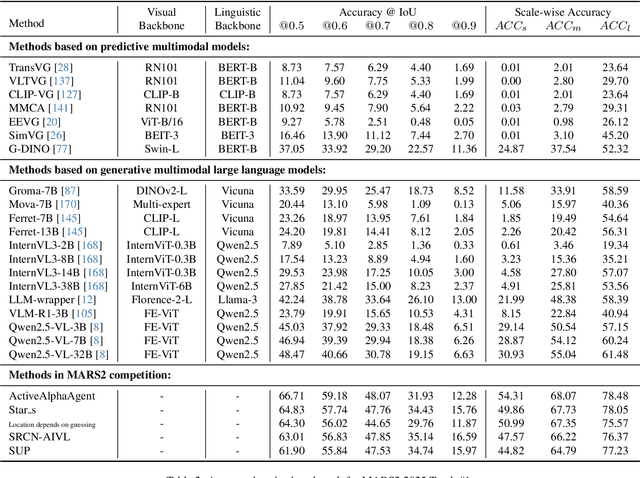
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
SoccerNet 2025 Challenges Results
Aug 26, 2025The SoccerNet 2025 Challenges mark the fifth annual edition of the SoccerNet open benchmarking effort, dedicated to advancing computer vision research in football video understanding. This year's challenges span four vision-based tasks: (1) Team Ball Action Spotting, focused on detecting ball-related actions in football broadcasts and assigning actions to teams; (2) Monocular Depth Estimation, targeting the recovery of scene geometry from single-camera broadcast clips through relative depth estimation for each pixel; (3) Multi-View Foul Recognition, requiring the analysis of multiple synchronized camera views to classify fouls and their severity; and (4) Game State Reconstruction, aimed at localizing and identifying all players from a broadcast video to reconstruct the game state on a 2D top-view of the field. Across all tasks, participants were provided with large-scale annotated datasets, unified evaluation protocols, and strong baselines as starting points. This report presents the results of each challenge, highlights the top-performing solutions, and provides insights into the progress made by the community. The SoccerNet Challenges continue to serve as a driving force for reproducible, open research at the intersection of computer vision, artificial intelligence, and sports. Detailed information about the tasks, challenges, and leaderboards can be found at https://www.soccer-net.org, with baselines and development kits available at https://github.com/SoccerNet.
A Reinforcement Learning Based Motion Planner for Quadrotor Autonomous Flight in Dense Environment
Aug 06, 2024



Quadrotor motion planning is critical for autonomous flight in complex environments, such as rescue operations. Traditional methods often employ trajectory generation optimization and passive time allocation strategies, which can limit the exploitation of the quadrotor's dynamic capabilities and introduce delays and inaccuracies. To address these challenges, we propose a novel motion planning framework that integrates visibility path searching and reinforcement learning (RL) motion generation. Our method constructs collision-free paths using heuristic search and visibility graphs, which are then refined by an RL policy to generate low-level motion commands. We validate our approach in simulated indoor environments, demonstrating better performance than traditional methods in terms of time span.