 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Skill: Programmable Runtime Skills for Efficient and Accurate LLM Agents
May 19, 2026Large Language Model (LLM) agents increasingly act inside real workspaces, where tools and skills determine whether model reasoning becomes reliable action. Existing skills remain largely informal: Markdown skills and instruction packs encode procedures as long natural-language documents, while function calling, Model Context Protocol (MCP) servers, and framework tools structure individual actions but usually leave workflow state, policy enforcement, and completion discipline outside the skill itself. We introduce Formal Skill, a runtime-native abstraction that represents reusable capability with JSON metadata and action schemas, reliable Python executors, hook-governed control logic, Formal Skill routing, and skill-local runtime state. By moving reusable procedure from repeated prompt text into executable state machines and hook policies, Formal Skill gives agents a token-efficient and enforceable control surface. We implement the abstraction in FairyClaw, an open-source event-driven runtime for executable, observable, and composable Formal Skills. On Harness-Bench, FairyClaw obtains highly competitive average scores while using substantially fewer tokens, with especially strong results on tasks that expose the role of Formal Skill.
TAIL: A Terrain-Aware Multi-Modal SLAM Dataset for Robot Locomotion in Deformable Granular Environments
Mar 25, 2024Terrain-aware perception holds the potential to improve the robustness and accuracy of autonomous robot navigation in the wilds, thereby facilitating effective off-road traversals. However, the lack of multi-modal perception across various motion patterns hinders the solutions of Simultaneous Localization And Mapping (SLAM), especially when confronting non-geometric hazards in demanding landscapes. In this paper, we first propose a Terrain-Aware multI-modaL (TAIL) dataset tailored to deformable and sandy terrains. It incorporates various types of robotic proprioception and distinct ground interactions for the unique challenges and benchmark of multi-sensor fusion SLAM. The versatile sensor suite comprises stereo frame cameras, multiple ground-pointing RGB-D cameras, a rotating 3D LiDAR, an IMU, and an RTK device. This ensemble is hardware-synchronized, well-calibrated, and self-contained. Utilizing both wheeled and quadrupedal locomotion, we efficiently collect comprehensive sequences to capture rich unstructured scenarios. It spans the spectrum of scope, terrain interactions, scene changes, ground-level properties, and dynamic robot characteristics. We benchmark several state-of-the-art SLAM methods against ground truth and provide performance validations. Corresponding challenges and limitations are also reported. All associated resources are accessible upon request at \url{https://tailrobot.github.io/}.
Robust-Locomotion-by-Logic: Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model Predictive Control
Mar 24, 2024



This study introduces a robust planning framework that utilizes a model predictive control (MPC) approach, enhanced by incorporating signal temporal logic (STL) specifications. This marks the first-ever study to apply STL-guided trajectory optimization for bipedal locomotion, specifically designed to handle both translational and orientational perturbations. Existing recovery strategies often struggle with reasoning complex task logic and evaluating locomotion robustness systematically, making them susceptible to failures caused by inappropriate recovery strategies or lack of robustness. To address these issues, we design an analytical robustness metric for bipedal locomotion and quantify this metric using STL specifications, which guide the generation of recovery trajectories to achieve maximum locomotion robustness. To enable safe and computational-efficient crossed-leg maneuver, we design data-driven self-leg-collision constraints that are $1000$ times faster than the traditional inverse-kinematics-based approach. Our framework outperforms a state-of-the-art locomotion controller, a standard MPC without STL, and a linear-temporal-logic-based planner in a high-fidelity dynamic simulation, especially in scenarios involving crossed-leg maneuvers. Additionally, the Cassie bipedal robot achieves robust performance under horizontal and orientational perturbations such as those observed in ship motions. These environments are validated in simulations and deployed on hardware. Furthermore, our proposed method demonstrates versatility on stepping stones and terrain-agnostic features on inclined terrains.
Exploring Self-Identified Counseling Expertise in Online Support Forums
Jun 24, 2021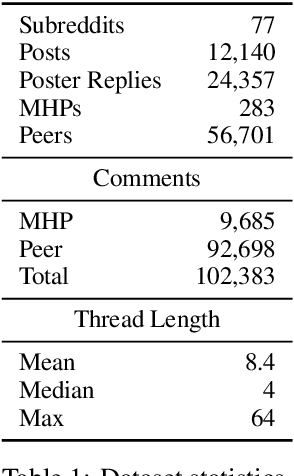
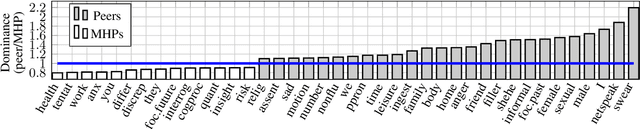
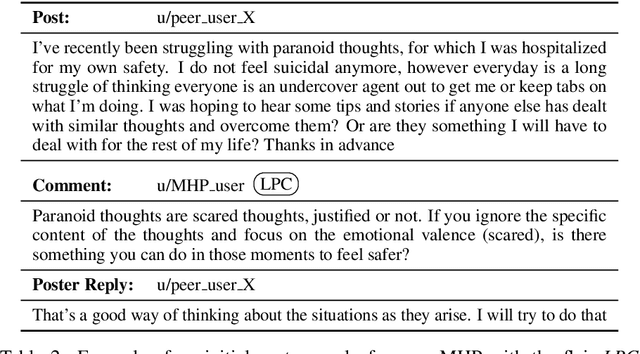
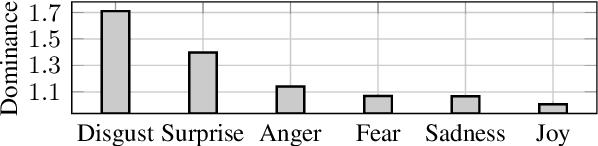
A growing number of people engage in online health forums, making it important to understand the quality of the advice they receive. In this paper, we explore the role of expertise in responses provided to help-seeking posts regarding mental health. We study the differences between (1) interactions with peers; and (2) interactions with self-identified mental health professionals. First, we show that a classifier can distinguish between these two groups, indicating that their language use does in fact differ. To understand this difference, we perform several analyses addressing engagement aspects, including whether their comments engage the support-seeker further as well as linguistic aspects, such as dominant language and linguistic style matching. Our work contributes toward the developing efforts of understanding how health experts engage with health information- and support-seekers in social networks. More broadly, it is a step toward a deeper understanding of the styles of interactions that cultivate supportive engagement in online communities.