 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Effectiveness and Efficiency of Agentic Tool-calling and RL Training
May 28, 2026Tool-calling is a central component of modern large language model (LLM) agents, equipping them with skills beyond their parametric knowledge. This paper studies tool-calling along two complementary axes: effectiveness, i.e., how this capability is measured, and efficiency, i.e., how it is learned. On effectiveness, we systematically analyze tool-calling evaluation pipelines and show that results can be highly sensitive to seemingly minor, often undocumented implementation choices including the random seed, system prompt, multi-turn template construction, and how prior interaction/reasoning history is carried forward. These choices can lead to substantial differences in reported performance, especially in multi-turn settings where without rigorous standardization, leaderboard rankings are unreliable. On efficiency, we examine standard reinforcement learning (RL) for tool-calling and identify two sources of computational waste: (i) during rollouts, many prompts produce no learning signal, and (ii) during policy updates, optimization incurs high computational cost. Guided by these findings, we introduce two techniques that accelerate RL-based tool-calling training, achieving substantial wall-clock speedup without degrading performance.
Action with Visual Primitives
May 21, 2026Vision-Language-Action (VLA) models have emerged as a promising paradigm for generalist robotic manipulation. A common design in current architectures maps language instructions and visual observations to actions in a single forward pass. While conceptually simple, this formulation entangles instruction comprehension, spatial scene understanding, and motor control within a single learning objective. As a result, the action expert must implicitly relearn cognitive and perceptual capabilities already present in the pretrained VLM, which can limit both learning efficiency and generalization. We introduce AVP (Action with Visual Primitives), an end-to-end architecture that implements this visual-primitive-centric interface: the VLM infers the next-stage target and emits visual-primitive tokens that condition a flow-matching action expert, with supervision derived from end-effector kinematics. Real-robot experiments on general pick-and-place tasks show that AVP improves the success rate by 27.61% over pi_0.5 and outperforms other recent methods, with consistent gains in data efficiency, spatial-compositional generalization, and object-level transfer.
EigentSearch-Q+: Enhancing Deep Research Agents with Structured Reasoning Tools
Apr 09, 2026Deep research requires reasoning over web evidence to answer open-ended questions, and it is a core capability for AI agents. Yet many deep research agents still rely on implicit, unstructured search behavior that causes redundant exploration and brittle evidence aggregation. Motivated by Anthropic's "think" tool paradigm and insights from the information-retrieval literature, we introduce Q+, a set of query and evidence processing tools that make web search more deliberate by guiding query planning, monitoring search progress, and extracting evidence from long web snapshots. We integrate Q+ into the browser sub-agent of Eigent, an open-source, production-ready multi-agent workforce for computer use, yielding EigentSearch-Q+. Across four benchmarks (SimpleQA-Verified, FRAMES, WebWalkerQA, and X-Bench DeepSearch), Q+ improves Eigent's browser agent benchmark-size-weighted average accuracy by 3.0, 3.8, and 0.6 percentage points (pp) for GPT-4.1, GPT-5.1, and Minimax M2.5 model backends, respectively. Case studies further suggest that EigentSearch-Q+ produces more coherent tool-calling trajectories by making search progress and evidence handling explicit.
MetaDAT: Generalizable Trajectory Prediction via Meta Pre-training and Data-Adaptive Test-Time Updating
Mar 10, 2026Existing trajectory prediction methods exhibit significant performance degradation under distribution shifts during test time. Although test-time training techniques have been explored to enable adaptation, current approaches rely on an offline pre-trained predictor that lacks online learning flexibility. Moreover, they depend on fixed online model updating rules that do not accommodate the specific characteristics of test data. To address these limitations, we first propose a meta-learning framework to directly optimize the predictor for fast and accurate online adaptation, which performs bi-level optimization on the performance of simulated test-time adaptation tasks during pre-training. Furthermore, at test time, we introduce a data-adaptive model updating mechanism that dynamically adjusts the predefined learning rates and updating frequencies based on online partial derivatives and hard sample selection. This mechanism enables the online learning rate to suit the test data, and focuses on informative hard samples to enhance efficiency. Experiments are conducted on various challenging cross-dataset distribution shift scenarios, including nuScenes, Lyft, and Waymo. Results demonstrate that our method achieves superior adaptation accuracy, surpassing state-of-the-art test-time training methods for trajectory prediction. Additionally, our method excels under suboptimal learning rates and high FPS demands, showcasing its robustness and practicality.
GR-Agent: Adaptive Graph Reasoning Agent under Incomplete Knowledge
Dec 16, 2025



Large language models (LLMs) achieve strong results on knowledge graph question answering (KGQA), but most benchmarks assume complete knowledge graphs (KGs) where direct supporting triples exist. This reduces evaluation to shallow retrieval and overlooks the reality of incomplete KGs, where many facts are missing and answers must be inferred from existing facts. We bridge this gap by proposing a methodology for constructing benchmarks under KG incompleteness, which removes direct supporting triples while ensuring that alternative reasoning paths required to infer the answer remain. Experiments on benchmarks constructed using our methodology show that existing methods suffer consistent performance degradation under incompleteness, highlighting their limited reasoning ability. To overcome this limitation, we present the Adaptive Graph Reasoning Agent (GR-Agent). It first constructs an interactive environment from the KG, and then formalizes KGQA as agent environment interaction within this environment. GR-Agent operates over an action space comprising graph reasoning tools and maintains a memory of potential supporting reasoning evidence, including relevant relations and reasoning paths. Extensive experiments demonstrate that GR-Agent outperforms non-training baselines and performs comparably to training-based methods under both complete and incomplete settings.
What Breaks Knowledge Graph based RAG? Empirical Insights into Reasoning under Incomplete Knowledge
Aug 11, 2025Knowledge Graph-based Retrieval-Augmented Generation (KG-RAG) is an increasingly explored approach for combining the reasoning capabilities of large language models with the structured evidence of knowledge graphs. However, current evaluation practices fall short: existing benchmarks often include questions that can be directly answered using existing triples in KG, making it unclear whether models perform reasoning or simply retrieve answers directly. Moreover, inconsistent evaluation metrics and lenient answer matching criteria further obscure meaningful comparisons. In this work, we introduce a general method for constructing benchmarks, together with an evaluation protocol, to systematically assess KG-RAG methods under knowledge incompleteness. Our empirical results show that current KG-RAG methods have limited reasoning ability under missing knowledge, often rely on internal memorization, and exhibit varying degrees of generalization depending on their design.
Multibeam High Throughput Satellite: Hardware Foundation, Resource Allocation, and Precoding
Aug 01, 2025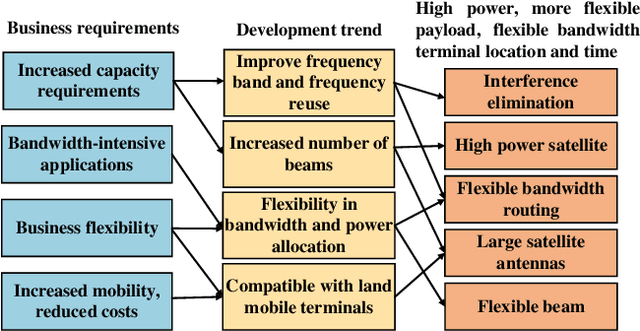
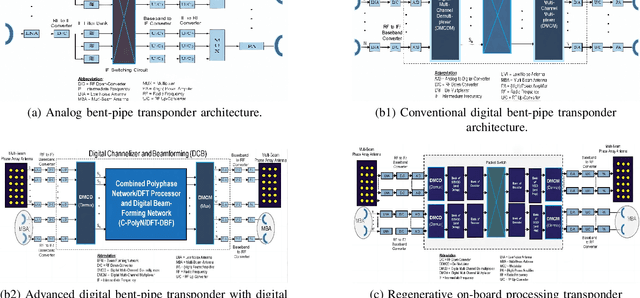
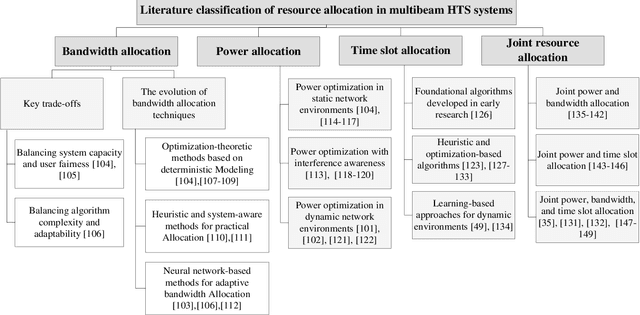
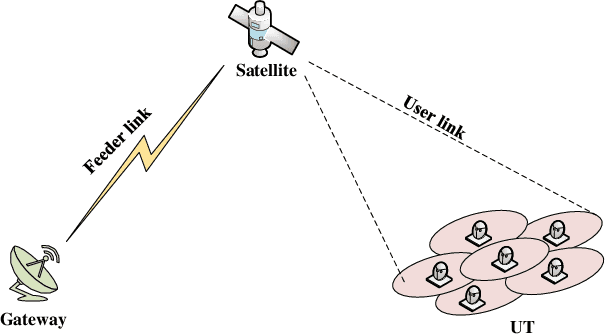
With its wide coverage and uninterrupted service, satellite communication is a critical technology for next-generation 6G communications. High throughput satellite (HTS) systems, utilizing multipoint beam and frequency multiplexing techniques, enable satellite communication capacity of up to Tbps to meet the growing traffic demand. Therefore, it is imperative to review the-state-of-the-art of multibeam HTS systems and identify their associated challenges and perspectives. Firstly, we summarize the multibeam HTS hardware foundations, including ground station systems, on-board payloads, and user terminals. Subsequently, we review the flexible on-board radio resource allocation approaches of bandwidth, power, time slot, and joint allocation schemes of HTS systems to optimize resource utilization and cater to non-uniform service demand. Additionally, we survey multibeam precoding methods for the HTS system to achieve full-frequency reuse and interference cancellation, which are classified according to different deployments such as single gateway precoding, multiple gateway precoding, on-board precoding, and hybrid on-board/on-ground precoding. Finally, we disscuss the challenges related to Q/V band link outage, time and frequency synchronization of gateways, the accuracy of channel state information (CSI), payload light-weight development, and the application of deep learning (DL). Research on these topics will contribute to enhancing the performance of HTS systems and finally delivering high-speed data to areas underserved by terrestrial networks.
Distilling Tool Knowledge into Language Models via Back-Translated Traces
Jun 23, 2025Large language models (LLMs) often struggle with mathematical problems that require exact computation or multi-step algebraic reasoning. Tool-integrated reasoning (TIR) offers a promising solution by leveraging external tools such as code interpreters to ensure correctness, but it introduces inference-time dependencies that hinder scalability and deployment. In this work, we propose a new paradigm for distilling tool knowledge into LLMs purely through natural language. We first construct a Solver Agent that solves math problems by interleaving planning, symbolic tool calls, and reflective reasoning. Then, using a back-translation pipeline powered by multiple LLM-based agents, we convert interleaved TIR traces into natural language reasoning traces. A Translator Agent generates explanations for individual tool calls, while a Rephrase Agent merges them into a fluent and globally coherent narrative. Empirically, we show that fine-tuning a small open-source model on these synthesized traces enables it to internalize both tool knowledge and structured reasoning patterns, yielding gains on competition-level math benchmarks without requiring tool access at inference.
Structured Labeling Enables Faster Vision-Language Models for End-to-End Autonomous Driving
Jun 05, 2025Vision-Language Models (VLMs) offer a promising approach to end-to-end autonomous driving due to their human-like reasoning capabilities. However, troublesome gaps remains between current VLMs and real-world autonomous driving applications. One major limitation is that existing datasets with loosely formatted language descriptions are not machine-friendly and may introduce redundancy. Additionally, high computational cost and massive scale of VLMs hinder the inference speed and real-world deployment. To bridge the gap, this paper introduces a structured and concise benchmark dataset, NuScenes-S, which is derived from the NuScenes dataset and contains machine-friendly structured representations. Moreover, we present FastDrive, a compact VLM baseline with 0.9B parameters. In contrast to existing VLMs with over 7B parameters and unstructured language processing(e.g., LLaVA-1.5), FastDrive understands structured and concise descriptions and generates machine-friendly driving decisions with high efficiency. Extensive experiments show that FastDrive achieves competitive performance on structured dataset, with approximately 20% accuracy improvement on decision-making tasks, while surpassing massive parameter baseline in inference speed with over 10x speedup. Additionally, ablation studies further focus on the impact of scene annotations (e.g., weather, time of day) on decision-making tasks, demonstrating their importance on decision-making tasks in autonomous driving.
Schema Generation for Large Knowledge Graphs Using Large Language Models
Jun 04, 2025



Schemas are vital for ensuring data quality in the Semantic Web and natural language processing. Traditionally, their creation demands substantial involvement from knowledge engineers and domain experts. Leveraging the impressive capabilities of large language models (LLMs) in related tasks like ontology engineering, we explore automatic schema generation using LLMs. To bridge the resource gap, we introduce two datasets: YAGO Schema and Wikidata EntitySchema, along with evaluation metrics. The LLM-based pipelines effectively utilize local and global information from knowledge graphs (KGs) to generate validating schemas in Shape Expressions (ShEx). Experiments demonstrate LLMs' strong potential in producing high-quality ShEx schemas, paving the way for scalable, automated schema generation for large KGs. Furthermore, our benchmark introduces a new challenge for structured generation, pushing the limits of LLMs on syntactically rich formalisms.