 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeing Through your Skin: Recognizing Objects with a Novel Visuotactile Sensor
Dec 14, 2020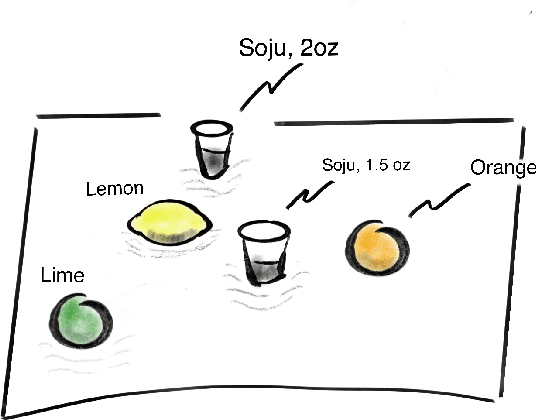
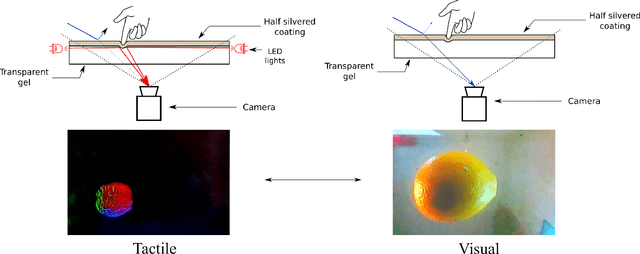
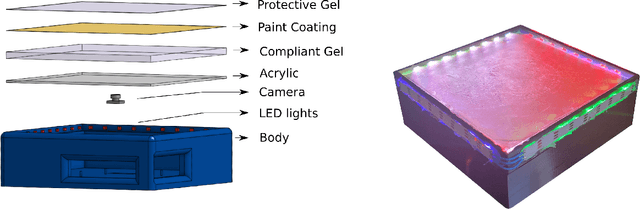
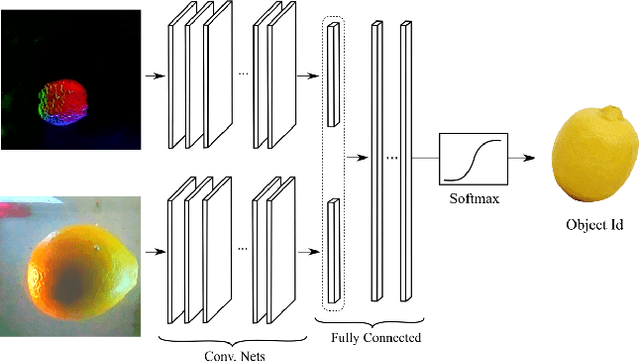
We introduce a new class of vision-based sensor and associated algorithmic processes that combine visual imaging with high-resolution tactile sending, all in a uniform hardware and computational architecture. We demonstrate the sensor's efficacy for both multi-modal object recognition and metrology. Object recognition is typically formulated as an unimodal task, but by combining two sensor modalities we show that we can achieve several significant performance improvements. This sensor, named the See-Through-your-Skin sensor (STS), is designed to provide rich multi-modal sensing of contact surfaces. Inspired by recent developments in optical tactile sensing technology, we address a key missing feature of these sensors: the ability to capture a visual perspective of the region beyond the contact surface. Whereas optical tactile sensors are typically opaque, we present a sensor with a semitransparent skin that has the dual capabilities of acting as a tactile sensor and/or as a visual camera depending on its internal lighting conditions. This paper details the design of the sensor, showcases its dual sensing capabilities, and presents a deep learning architecture that fuses vision and touch. We validate the ability of the sensor to classify household objects, recognize fine textures, and infer their physical properties both through numerical simulations and experiments with a smart countertop prototype.
Gaussian-Dirichlet Random Fields for Inference over High Dimensional Categorical Observations
Mar 26, 2020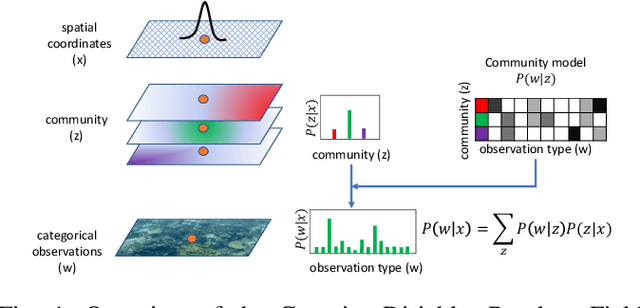
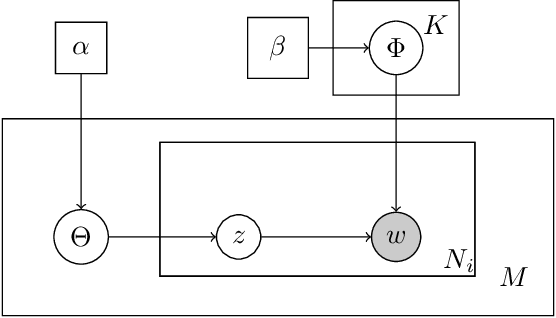
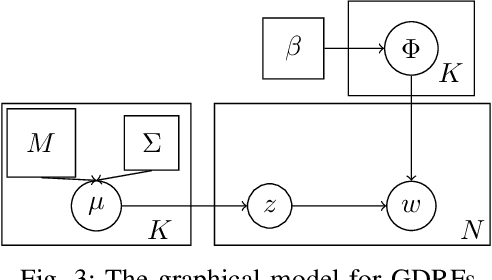
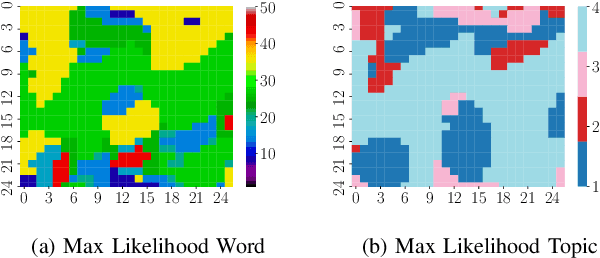
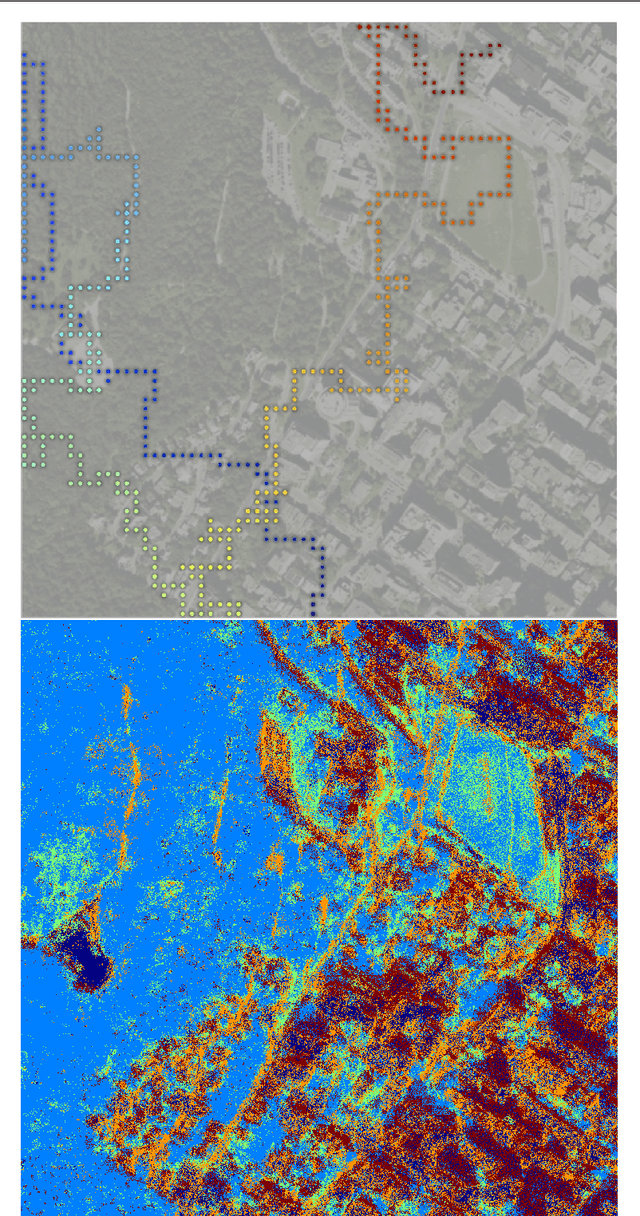
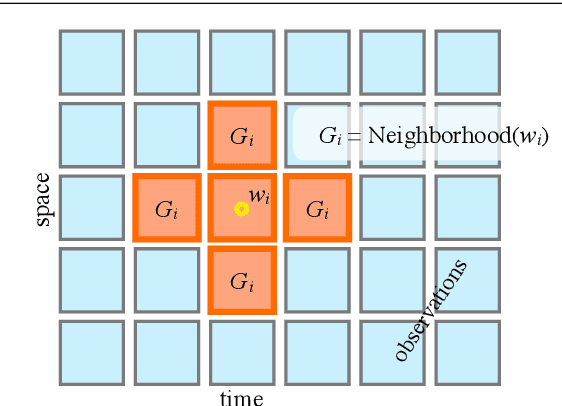
We propose a generative model for the spatio-temporal distribution of high dimensional categorical observations. These are commonly produced by robots equipped with an imaging sensor such as a camera, paired with an image classifier, potentially producing observations over thousands of categories. The proposed approach combines the use of Dirichlet distributions to model sparse co-occurrence relations between the observed categories using a latent variable, and Gaussian processes to model the latent variable's spatio-temporal distribution. Experiments in this paper show that the resulting model is able to efficiently and accurately approximate the temporal distribution of high dimensional categorical measurements such as taxonomic observations of microscopic organisms in the ocean, even in unobserved (held out) locations, far from other samples. This work's primary motivation is to enable deployment of informative path planning techniques over high dimensional categorical fields, which until now have been limited to scalar or low dimensional vector observations.
Active Reward Learning for Co-Robotic Vision Based Exploration in Bandwidth Limited Environments
Mar 10, 2020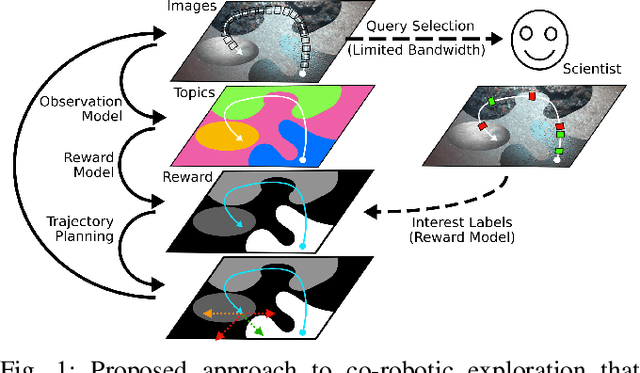
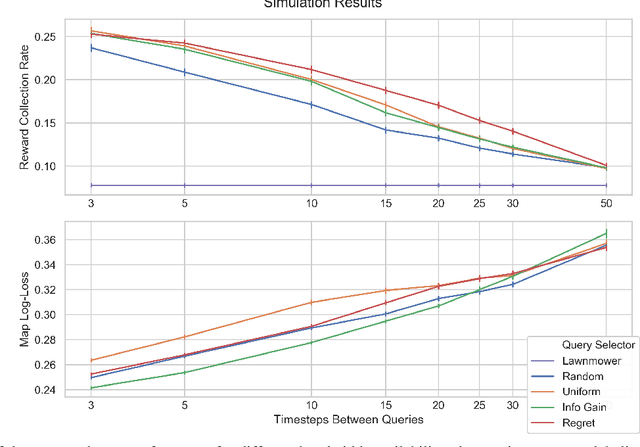
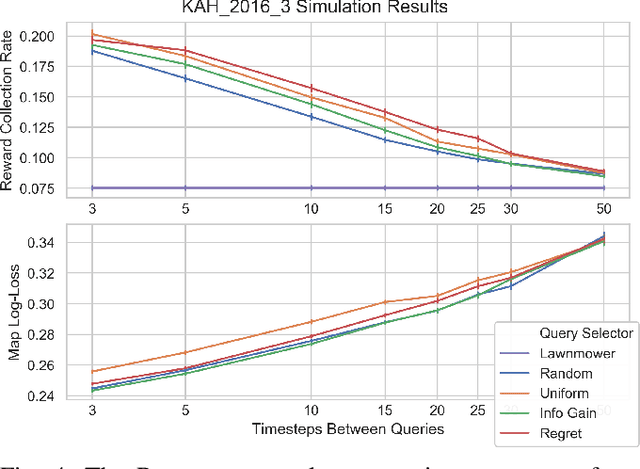
We present a novel POMDP problem formulation for a robot that must autonomously decide where to go to collect new and scientifically relevant images given a limited ability to communicate with its human operator. From this formulation we derive constraints and design principles for the observation model, reward model, and communication strategy of such a robot, exploring techniques to deal with the very high-dimensional observation space and scarcity of relevant training data. We introduce a novel active reward learning strategy based on making queries to help the robot minimize path "regret" online, and evaluate it for suitability in autonomous visual exploration through simulations. We demonstrate that, in some bandwidth-limited environments, this novel regret-based criterion enables the robotic explorer to collect up to 17% more reward per mission than the next-best criterion.
Information-Guided Robotic Maximum Seek-and-Sample in Partially Observable Continuous Environments
Sep 26, 2019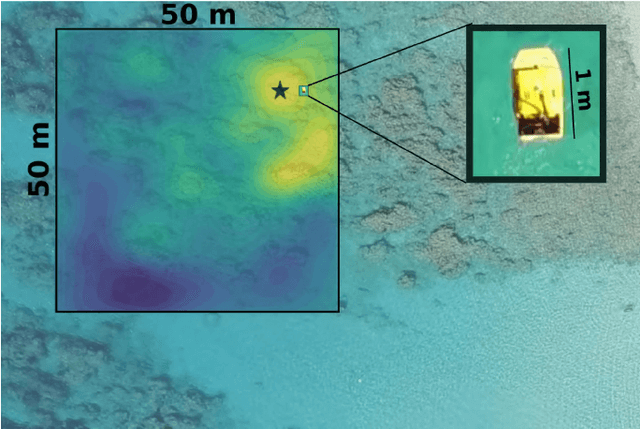
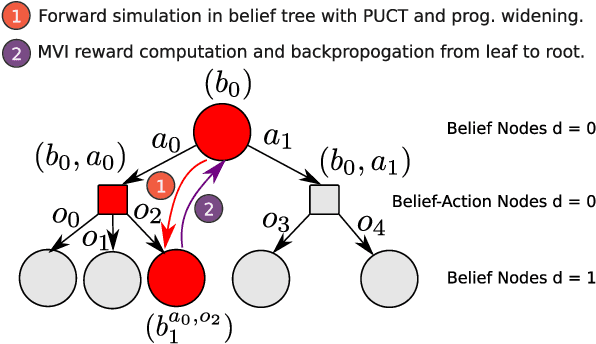
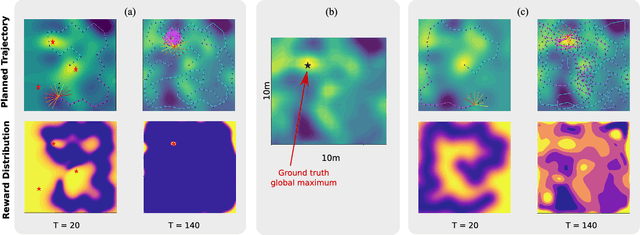

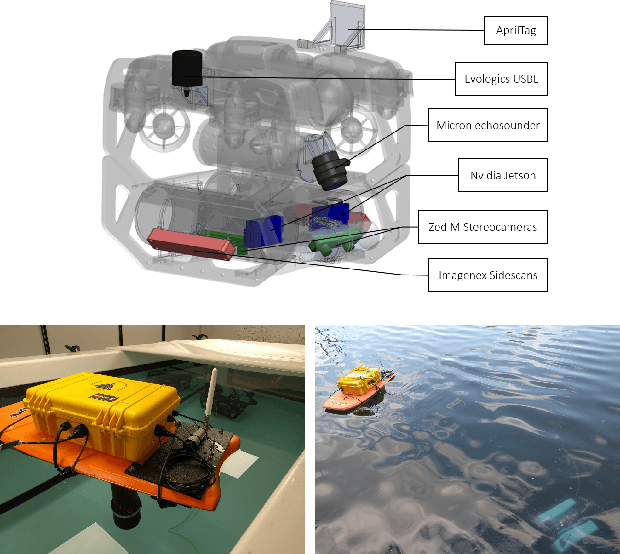
We present PLUMES, a planner to localizing and collecting samples at the global maximum of an a priori unknown and partially observable continuous environment. The "maximum-seek-and-sample" (MSS) problem is pervasive in the environmental and earth sciences. Experts want to collect scientifically valuable samples at an environmental maximum (e.g., an oil-spill source), but do not have prior knowledge about the phenomenon's distribution. We formulate the MSS problem as a partially-observable Markov decision process (POMDP) with continuous state and observation spaces, and a sparse reward signal. To solve the MSS POMDP, PLUMES uses an information-theoretic reward heuristic with continous-observation Monte Carlo Tree Search to efficiently localize and sample from the global maximum. In simulation and field experiments, PLUMES collects more scientifically valuable samples than state-of-the-art planners in a diverse set of environments, with various platforms, sensors, and challenging real-world conditions.
* 8 pages, 8 figures, To appear in the proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 Macau
Streaming Scene Maps for Co-Robotic Exploration in Bandwidth Limited Environments
Mar 07, 2019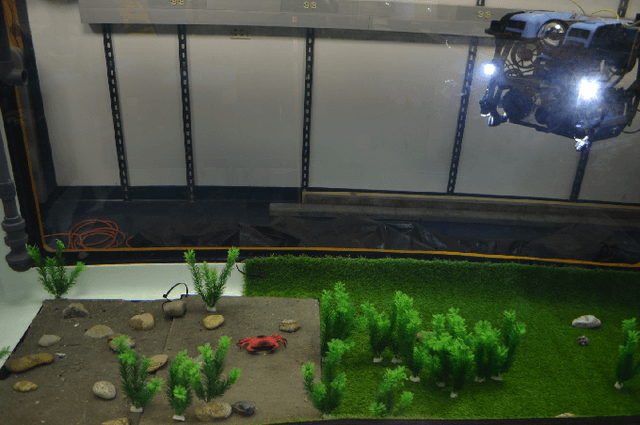
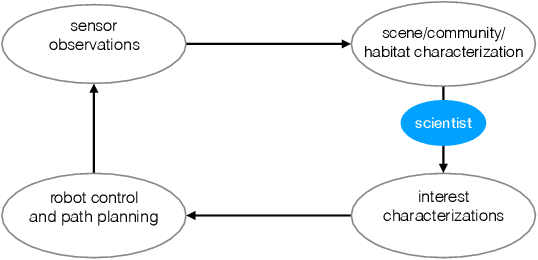
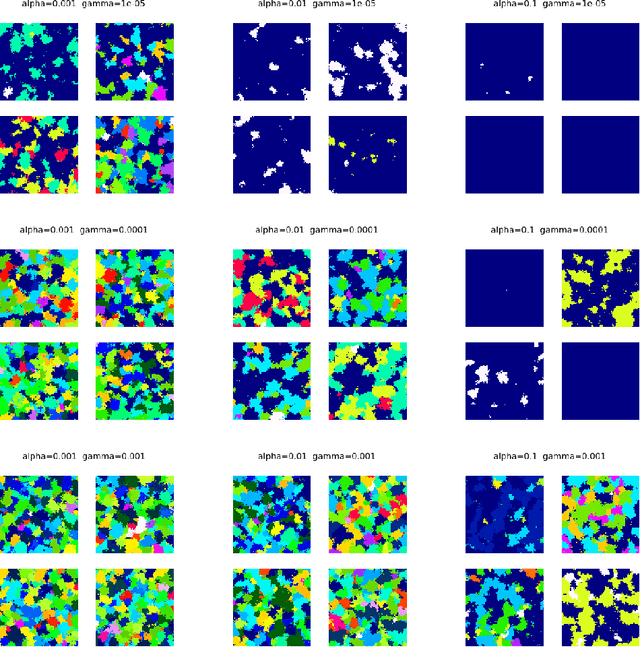
This paper proposes a bandwidth tunable technique for real-time probabilistic scene modeling and mapping to enable co-robotic exploration in communication constrained environments such as the deep sea. The parameters of the system enable the user to characterize the scene complexity represented by the map, which in turn determines the bandwidth requirements. The approach is demonstrated using an underwater robot that learns an unsupervised scene model of the environment and then uses this scene model to communicate the spatial distribution of various high-level semantic scene constructs to a human operator. Preliminary experiments in an artificially constructed tank environment as well as simulated missions over a 10m$\times$10m coral reef using real data show the tunability of the maps to different bandwidth constraints and science interests. To our knowledge this is the first paper to quantify how the free parameters of the unsupervised scene model impact both the scientific utility of and bandwidth required to communicate the resulting scene model.
Near-optimal irrevocable sample selection for periodic data streams with applications to marine robotics
Jan 21, 2018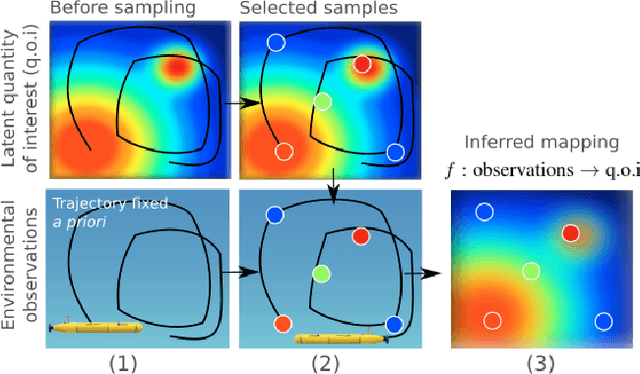
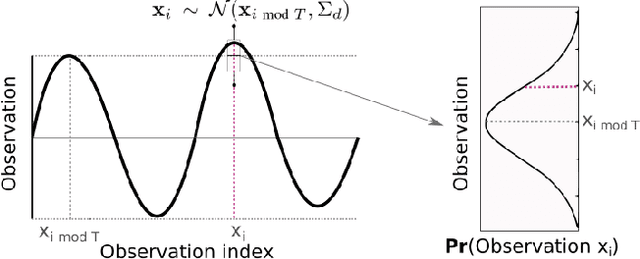
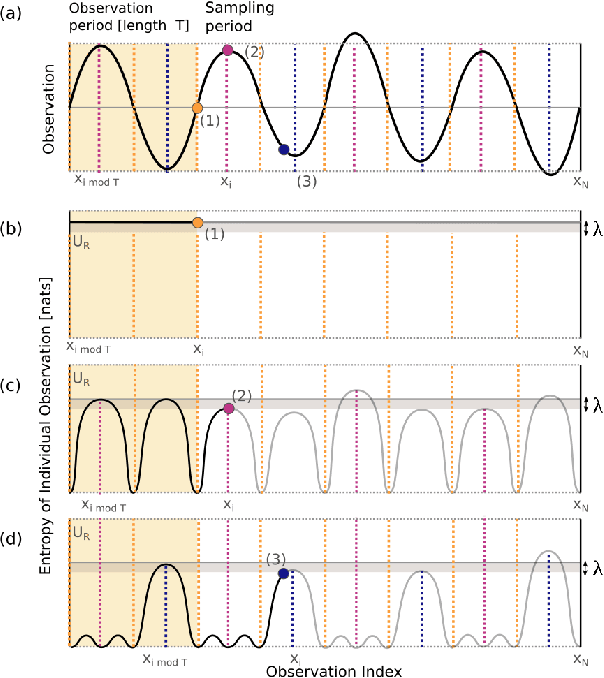
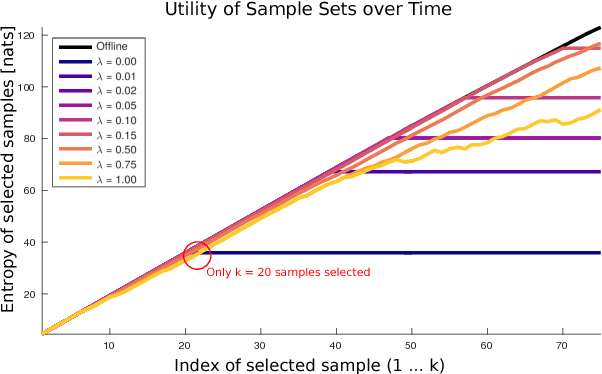
We consider the task of monitoring spatiotemporal phenomena in real-time by deploying limited sampling resources at locations of interest irrevocably and without knowledge of future observations. This task can be modeled as an instance of the classical secretary problem. Although this problem has been studied extensively in theoretical domains, existing algorithms require that data arrive in random order to provide performance guarantees. These algorithms will perform arbitrarily poorly on data streams such as those encountered in robotics and environmental monitoring domains, which tend to have spatiotemporal structure. We focus on the problem of selecting representative samples from phenomena with periodic structure and introduce a novel sample selection algorithm that recovers a near-optimal sample set according to any monotone submodular utility function. We evaluate our algorithm on a seven-year environmental dataset collected at the Martha's Vineyard Coastal Observatory and show that it selects phytoplankton sample locations that are nearly optimal in an information-theoretic sense for predicting phytoplankton concentrations in locations that were not directly sampled. The proposed periodic secretary algorithm can be used with theoretical performance guarantees in many real-time sensing and robotics applications for streaming, irrevocable sample selection from periodic data streams.
Feature discovery and visualization of robot mission data using convolutional autoencoders and Bayesian nonparametric topic models
Nov 30, 2017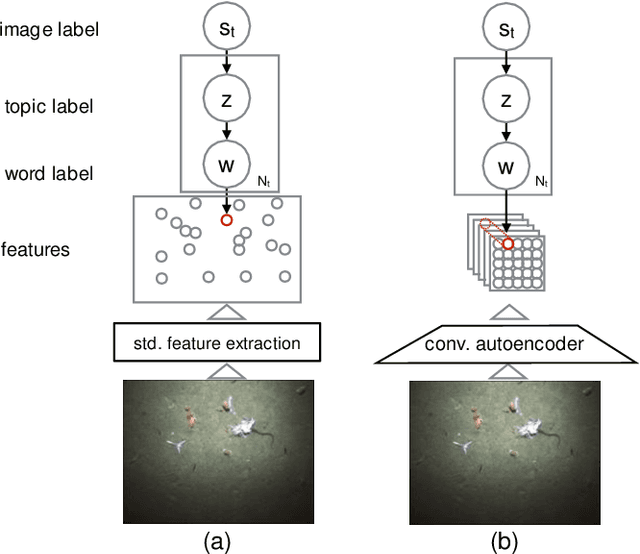
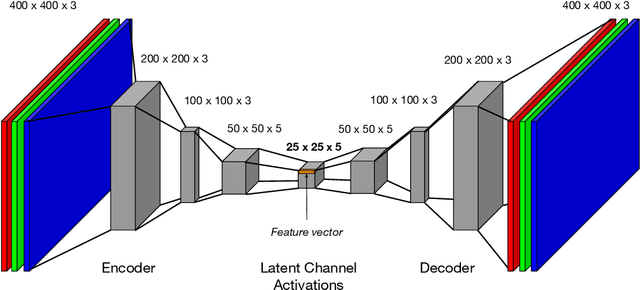
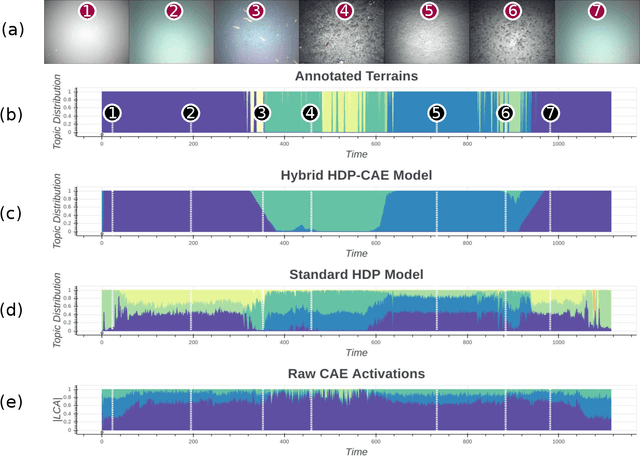
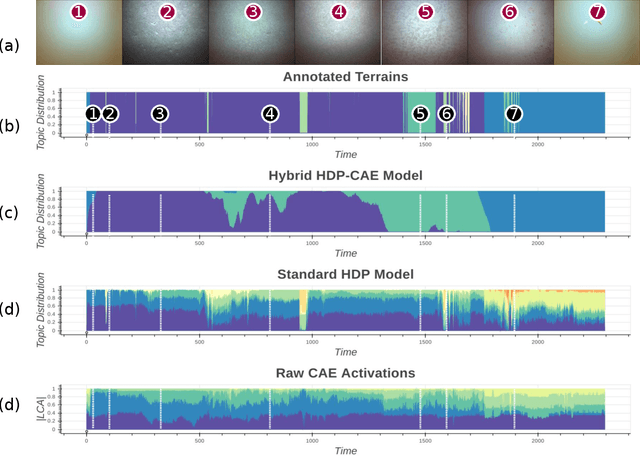
The gap between our ability to collect interesting data and our ability to analyze these data is growing at an unprecedented rate. Recent algorithmic attempts to fill this gap have employed unsupervised tools to discover structure in data. Some of the most successful approaches have used probabilistic models to uncover latent thematic structure in discrete data. Despite the success of these models on textual data, they have not generalized as well to image data, in part because of the spatial and temporal structure that may exist in an image stream. We introduce a novel unsupervised machine learning framework that incorporates the ability of convolutional autoencoders to discover features from images that directly encode spatial information, within a Bayesian nonparametric topic model that discovers meaningful latent patterns within discrete data. By using this hybrid framework, we overcome the fundamental dependency of traditional topic models on rigidly hand-coded data representations, while simultaneously encoding spatial dependency in our topics without adding model complexity. We apply this model to the motivating application of high-level scene understanding and mission summarization for exploratory marine robots. Our experiments on a seafloor dataset collected by a marine robot show that the proposed hybrid framework outperforms current state-of-the-art approaches on the task of unsupervised seafloor terrain characterization.
Phytoplankton Hotspot Prediction With an Unsupervised Spatial Community Model
Mar 21, 2017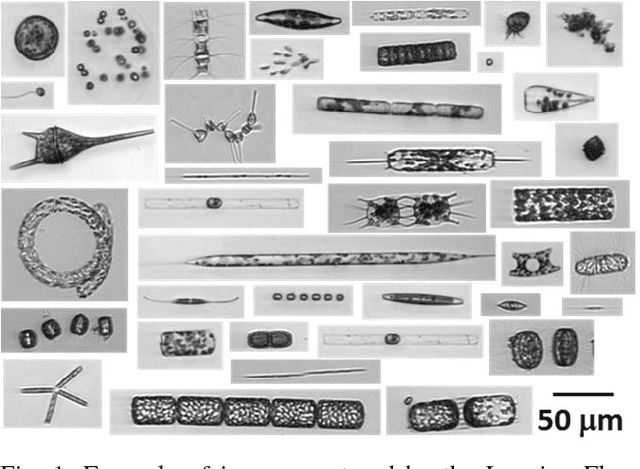
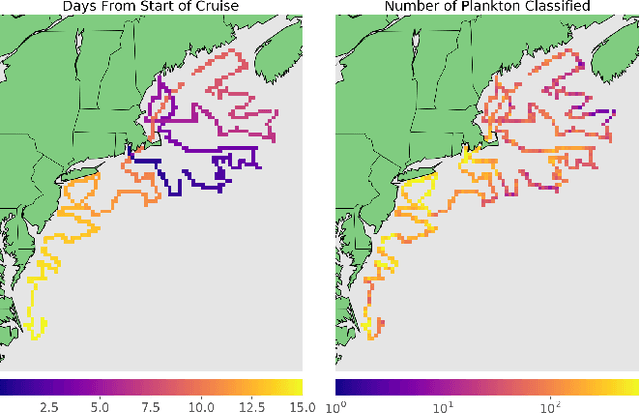
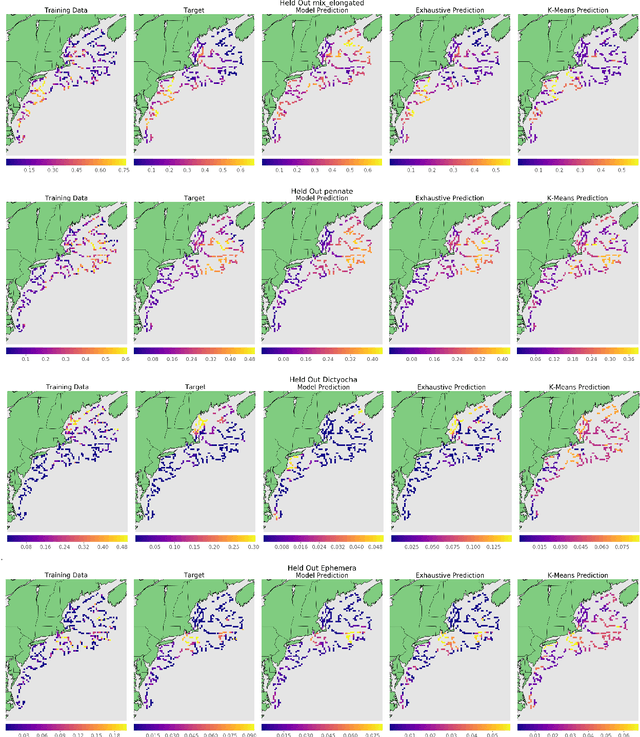
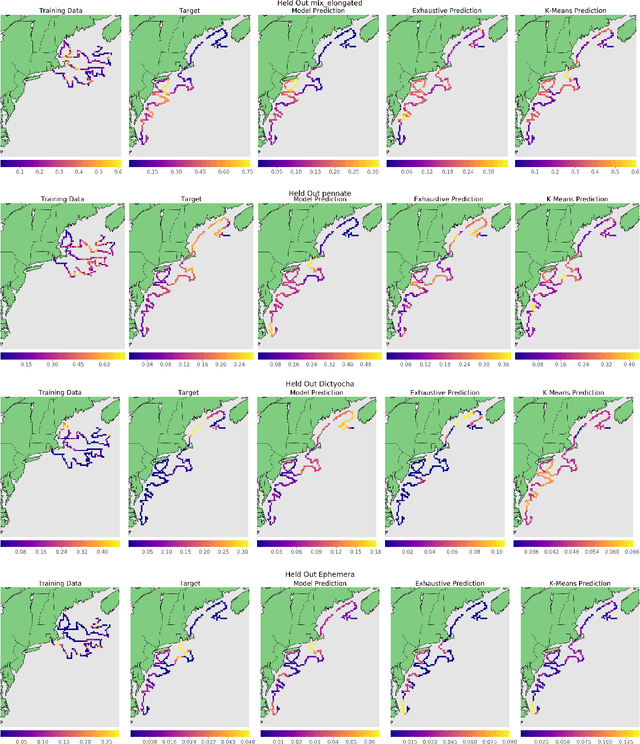
Many interesting natural phenomena are sparsely distributed and discrete. Locating the hotspots of such sparsely distributed phenomena is often difficult because their density gradient is likely to be very noisy. We present a novel approach to this search problem, where we model the co-occurrence relations between a robot's observations with a Bayesian nonparametric topic model. This approach makes it possible to produce a robust estimate of the spatial distribution of the target, even in the absence of direct target observations. We apply the proposed approach to the problem of finding the spatial locations of the hotspots of a specific phytoplankton taxon in the ocean. We use classified image data from Imaging FlowCytobot (IFCB), which automatically measures individual microscopic cells and colonies of cells. Given these individual taxon-specific observations, we learn a phytoplankton community model that characterizes the co-occurrence relations between taxa. We present experiments with simulated robot missions drawn from real observation data collected during a research cruise traversing the US Atlantic coast. Our results show that the proposed approach outperforms nearest neighbor and k-means based methods for predicting the spatial distribution of hotspots from in-situ observations.
Anomaly Detection in Unstructured Environments using Bayesian Nonparametric Scene Modeling
Feb 16, 2016
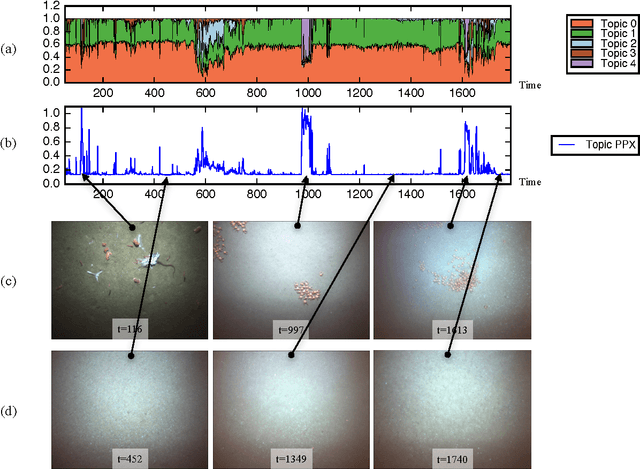
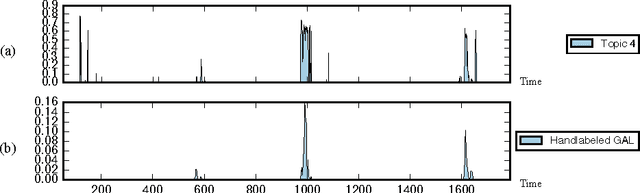
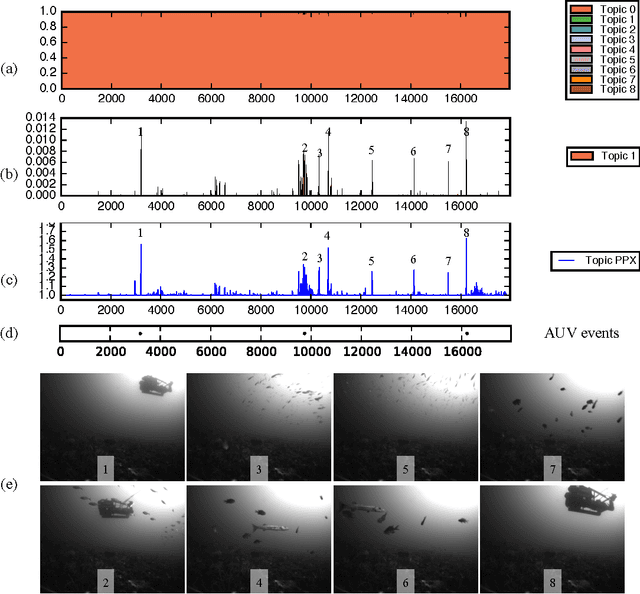
This paper explores the use of a Bayesian non-parametric topic modeling technique for the purpose of anomaly detection in video data. We present results from two experiments. The first experiment shows that the proposed technique is automatically able characterize the underlying terrain, and detect anomalous flora in image data collected by an underwater robot. The second experiment shows that the same technique can be used on images from a static camera in a dynamic unstructured environment. In the second dataset, consisting of video data from a static seafloor camera capturing images of a busy coral reef, the proposed technique was able to detect all three instances of an underwater vehicle passing in front of the camera, amongst many other observations of fishes, debris, lighting changes due to surface waves, and benthic flora.
Modeling Curiosity in a Mobile Robot for Long-Term Autonomous Exploration and Monitoring
Sep 26, 2015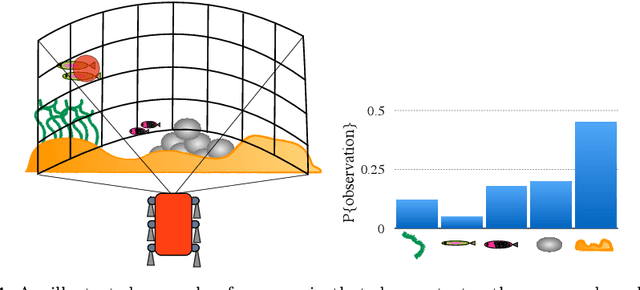

This paper presents a novel approach to modeling curiosity in a mobile robot, which is useful for monitoring and adaptive data collection tasks, especially in the context of long term autonomous missions where pre-programmed missions are likely to have limited utility. We use a realtime topic modeling technique to build a semantic perception model of the environment, using which, we plan a path through the locations in the world with high semantic information content. The life-long learning behavior of the proposed perception model makes it suitable for long-term exploration missions. We validate the approach using simulated exploration experiments using aerial and underwater data, and demonstrate an implementation on the Aqua underwater robot in a variety of scenarios. We find that the proposed exploration paths that are biased towards locations with high topic perplexity, produce better terrain models with high discriminative power. Moreover, we show that the proposed algorithm implemented on Aqua robot is able to do tasks such as coral reef inspection, diver following, and sea floor exploration, without any prior training or preparation.