 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGMN4AD: Graph Matching Network for Alzheimer's Disease Diagnosis with Test-Time Domain Adaptation using Multi-centered Structure Magnetic Resonance Imaging
Jun 11, 2026Alzheimer's Disease (AD) is a progressive neurodegenerative disorder that affects millions of older adults, with prevalence expected to rise significantly in the coming years. Early diagnosis, particularly during the mild cognitive impairment (MCI) stage, is critical for timely intervention. Structural Magnetic Resonance Imaging (sMRI) has emerged as a key modality for detecting AD-related brain changes, but traditional graph-based approaches often struggle with modality and inter-site heterogeneity, limiting diagnostic performance. In this paper, we propose Graph Matching Network for Alzheimer's Disease Diagnosis (GMN4AD), designed to model interactions between heterogeneous brain graphs derived from neuroimaging data. Unlike conventional methods that treat each brain graph independently, GMN4AD leverages graph matching to capture cross-graph relationships, enhancing diagnostic precision. Furthermore, we introduce a test-time domain adaptation strategy that combines contrastive learning to mitigate domain shifts during inference. Extensive experiments on three public AD datasets demonstrate that GMN4AD achieves superior performance compared to state-of-the-art methods, offering a robust and generalizable solution for AD diagnosis.
ProMUSE: Progressive Multi-modal Uncertainty-guided Staged Evidential Alzheimer Disease Classification
Jun 11, 2026Alzheimer's disease (AD) is a fatal disorder that destroys memory and cognitive skills in the elderly population. Most treatments for AD are effective in the early stage, leading to an increasing demand for early AD diagnosis. AD diagnosis increasingly relies on multimodal data such as clinical assessments, structural Magnetic Resonance Imaging (MRI), and Positron Emission Tomography (PET) imaging. However, MRI and PET acquisition remain costly and not universally accessible, making full-modality inference impractical in real-world clinical workflows. We propose ProMUSE, a Progressive Multi-modal Uncertainty Guided Staged Evidential Network that adaptively determines when additional modalities are necessary, helping reduce the overall cost of data acquisition while maintaining accuracy. ProMUSE first performs evidential classification using low-cost clinical data and quantifies uncertainty via a Dirichlet-based subjective logic model. When uncertainty exceeds a learned threshold, ProMUSE progressively incorporates MRI or PET features, fusing modality-wise belief and uncertainty through Dempster-Shafer theory to obtain a calibrated multimodal prediction. This staged acquisition strategy enables accurate diagnosis while minimizing reliance on expensive imaging. Experiments on ADNI, AIBL, and OASIS across CN-AD, CN-MCI, and MCI-AD tasks demonstrate that ProMUSE achieves competitive or superior accuracy compared to full-modality baselines while reducing MRI/PET usage by 50-90%, yielding substantial cost savings. These results highlight ProMUSE as a practical, uncertainty-aware, and resource-efficient solution for real-world AD screening.
ETT-CKGE: Efficient Task-driven Tokens for Continual Knowledge Graph Embedding
Jun 09, 2025Continual Knowledge Graph Embedding (CKGE) seeks to integrate new knowledge while preserving past information. However, existing methods struggle with efficiency and scalability due to two key limitations: (1) suboptimal knowledge preservation between snapshots caused by manually designed node/relation importance scores that ignore graph dependencies relevant to the downstream task, and (2) computationally expensive graph traversal for node/relation importance calculation, leading to slow training and high memory overhead. To address these limitations, we introduce ETT-CKGE (Efficient, Task-driven, Tokens for Continual Knowledge Graph Embedding), a novel task-guided CKGE method that leverages efficient task-driven tokens for efficient and effective knowledge transfer between snapshots. Our method introduces a set of learnable tokens that directly capture task-relevant signals, eliminating the need for explicit node scoring or traversal. These tokens serve as consistent and reusable guidance across snapshots, enabling efficient token-masked embedding alignment between snapshots. Importantly, knowledge transfer is achieved through simple matrix operations, significantly reducing training time and memory usage. Extensive experiments across six benchmark datasets demonstrate that ETT-CKGE consistently achieves superior or competitive predictive performance, while substantially improving training efficiency and scalability compared to state-of-the-art CKGE methods. The code is available at: https://github.com/lijingzhu1/ETT-CKGE/tree/main
SGUQ: Staged Graph Convolution Neural Network for Alzheimer's Disease Diagnosis using Multi-Omics Data
Oct 14, 2024



Alzheimer's disease (AD) is a chronic neurodegenerative disorder and the leading cause of dementia, significantly impacting cost, mortality, and burden worldwide. The advent of high-throughput omics technologies, such as genomics, transcriptomics, proteomics, and epigenomics, has revolutionized the molecular understanding of AD. Conventional AI approaches typically require the completion of all omics data at the outset to achieve optimal AD diagnosis, which are inefficient and may be unnecessary. To reduce the clinical cost and improve the accuracy of AD diagnosis using multi-omics data, we propose a novel staged graph convolutional network with uncertainty quantification (SGUQ). SGUQ begins with mRNA and progressively incorporates DNA methylation and miRNA data only when necessary, reducing overall costs and exposure to harmful tests. Experimental results indicate that 46.23% of the samples can be reliably predicted using only single-modal omics data (mRNA), while an additional 16.04% of the samples can achieve reliable predictions when combining two omics data types (mRNA + DNA methylation). In addition, the proposed staged SGUQ achieved an accuracy of 0.858 on ROSMAP dataset, which outperformed existing methods significantly. The proposed SGUQ can not only be applied to AD diagnosis using multi-omics data but also has the potential for clinical decision-making using multi-viewed data. Our implementation is publicly available at https://github.com/chenzhao2023/multiomicsuncertainty.
DG-Labeler and DGL-MOTS Dataset: Boost the Autonomous Driving Perception
Oct 15, 2021
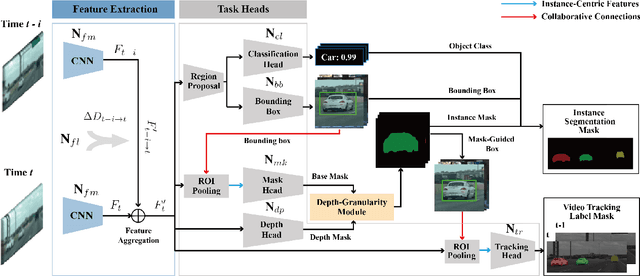
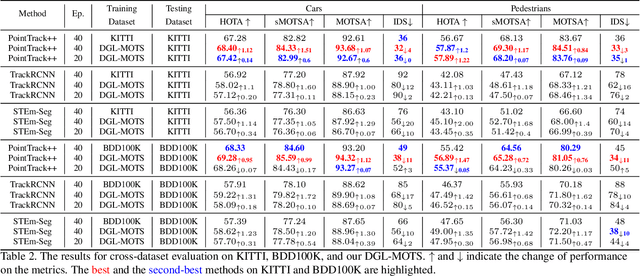
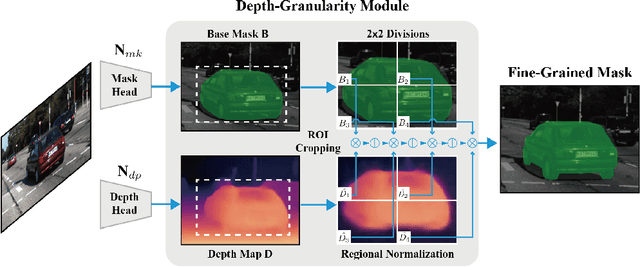
Multi-object tracking and segmentation (MOTS) is a critical task for autonomous driving applications. The existing MOTS studies face two critical challenges: 1) the published datasets inadequately capture the real-world complexity for network training to address various driving settings; 2) the working pipeline annotation tool is under-studied in the literature to improve the quality of MOTS learning examples. In this work, we introduce the DG-Labeler and DGL-MOTS dataset to facilitate the training data annotation for the MOTS task and accordingly improve network training accuracy and efficiency. DG-Labeler uses the novel Depth-Granularity Module to depict the instance spatial relations and produce fine-grained instance masks. Annotated by DG-Labeler, our DGL-MOTS dataset exceeds the prior effort (i.e., KITTI MOTS and BDD100K) in data diversity, annotation quality, and temporal representations. Results on extensive cross-dataset evaluations indicate significant performance improvements for several state-of-the-art methods trained on our DGL-MOTS dataset. We believe our DGL-MOTS Dataset and DG-Labeler hold the valuable potential to boost the visual perception of future transportation.