 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Spatio-Temporal Expert Prefetching Framework for Efficient MoE-based LLM Inference
Jun 13, 2026Mixture-of-Experts (MoE) based large language models (LLMs), such as Qwen and DeepSeek, have recently emerged as an effective approach to improving model capacity without proportionally increasing computational cost. By replacing the conventional feed-forward network in dense LLMs with a set of experts and activating only a subset of them for each input token, MoE models significantly increase the total number of parameters while keeping the per-token computation relatively manageable. However, this dynamic and irregular expert activation pattern also introduces substantial expert loading overhead during inference, since the required experts must be fetched on demand according to token-dependent routing results. As a result, expert loading latency becomes a major source of performance and energy inefficiency. To this end, we first perform a comprehensive analysis of expert selection behavior in various MoE-based LLMs and applications, including language understanding and code generation. Our analysis reveals that, within each application domain, expert requests exhibit strong correlation across both adjacent MoE layers and consecutive decoding tokens, making future expert activations predictable. Based on this insight, we propose ST-MoE, a spatio-temporal expert prefetching framework that proactively stages experts ahead of use to overlap expert loading with ongoing computation. ST-MoE combines a lightweight runtime prediction mechanism that preserves the original routing behavior with a reconfigurable hardware design that efficiently supports dynamic expert prefetching. The combined effect of the prediction mechanism with the supporting hardware significantly improves MoE inference performance and energy efficiency while preserving model inference accuracy.
X-Loco: Towards Generalist Humanoid Locomotion Control via Synergetic Policy Distillation
Mar 04, 2026While recent advances have demonstrated strong performance in individual humanoid skills such as upright locomotion, fall recovery and whole-body coordination, learning a single policy that masters all these skills remains challenging due to the diverse dynamics and conflicting control objectives involved. To address this, we introduce X-Loco, a framework for training a vision-based generalist humanoid locomotion policy. X-Loco trains multiple oracle specialist policies and adopts a synergetic policy distillation with a case-adaptive specialist selection mechanism, which dynamically leverages multiple specialist policies to guide a vision-based student policy. This design enables the student to acquire a broad spectrum of locomotion skills, ranging from fall recovery to terrain traversal and whole-body coordination skills. To the best of our knowledge, X-Loco is the first framework to demonstrate vision-based humanoid locomotion that jointly integrates upright locomotion, whole-body coordination and fall recovery, while operating solely under velocity commands without relying on reference motions. Experimental results show that X-Loco achieves superior performance, demonstrated by tasks such as fall recovery and terrain traversal. Ablation studies further highlight that our framework effectively leverages specialist expertise and enhances learning efficiency.
Understanding and Enhancing Encoder-based Adversarial Transferability against Large Vision-Language Models
Feb 10, 2026Large vision-language models (LVLMs) have achieved impressive success across multimodal tasks, but their reliance on visual inputs exposes them to significant adversarial threats. Existing encoder-based attacks perturb the input image by optimizing solely on the vision encoder, rather than the entire LVLM, offering a computationally efficient alternative to end-to-end optimization. However, their transferability across different LVLM architectures in realistic black-box scenarios remains poorly understood. To address this gap, we present the first systematic study towards encoder-based adversarial transferability in LVLMs. Our contributions are threefold. First, through large-scale benchmarking over eight diverse LVLMs, we reveal that existing attacks exhibit severely limited transferability. Second, we perform in-depth analysis, disclosing two root causes that hinder the transferability: (1) inconsistent visual grounding across models, where different models focus their attention on distinct regions; (2) redundant semantic alignment within models, where a single object is dispersed across multiple overlapping token representations. Third, we propose Semantic-Guided Multimodal Attack (SGMA), a novel framework to enhance the transferability. Inspired by the discovered causes in our analysis, SGMA directs perturbations toward semantically critical regions and disrupts cross-modal grounding at both global and local levels. Extensive experiments across different victim models and tasks show that SGMA achieves higher transferability than existing attacks. These results expose critical security risks in LVLM deployment and underscore the urgent need for robust multimodal defenses.
Towards Adaptive Humanoid Control via Multi-Behavior Distillation and Reinforced Fine-Tuning
Nov 11, 2025Humanoid robots are promising to learn a diverse set of human-like locomotion behaviors, including standing up, walking, running, and jumping. However, existing methods predominantly require training independent policies for each skill, yielding behavior-specific controllers that exhibit limited generalization and brittle performance when deployed on irregular terrains and in diverse situations. To address this challenge, we propose Adaptive Humanoid Control (AHC) that adopts a two-stage framework to learn an adaptive humanoid locomotion controller across different skills and terrains. Specifically, we first train several primary locomotion policies and perform a multi-behavior distillation process to obtain a basic multi-behavior controller, facilitating adaptive behavior switching based on the environment. Then, we perform reinforced fine-tuning by collecting online feedback in performing adaptive behaviors on more diverse terrains, enhancing terrain adaptability for the controller. We conduct experiments in both simulation and real-world experiments in Unitree G1 robots. The results show that our method exhibits strong adaptability across various situations and terrains. Project website: https://ahc-humanoid.github.io.
MoRE: Mixture of Residual Experts for Humanoid Lifelike Gaits Learning on Complex Terrains
Jun 12, 2025



Humanoid robots have demonstrated robust locomotion capabilities using Reinforcement Learning (RL)-based approaches. Further, to obtain human-like behaviors, existing methods integrate human motion-tracking or motion prior in the RL framework. However, these methods are limited in flat terrains with proprioception only, restricting their abilities to traverse challenging terrains with human-like gaits. In this work, we propose a novel framework using a mixture of latent residual experts with multi-discriminators to train an RL policy, which is capable of traversing complex terrains in controllable lifelike gaits with exteroception. Our two-stage training pipeline first teaches the policy to traverse complex terrains using a depth camera, and then enables gait-commanded switching between human-like gait patterns. We also design gait rewards to adjust human-like behaviors like robot base height. Simulation and real-world experiments demonstrate that our framework exhibits exceptional performance in traversing complex terrains, and achieves seamless transitions between multiple human-like gait patterns.
An Imitative Reinforcement Learning Framework for Autonomous Dogfight
Jun 17, 2024Unmanned Combat Aerial Vehicle (UCAV) dogfight, which refers to a fight between two or more UCAVs usually at close quarters, plays a decisive role on the aerial battlefields. With the evolution of artificial intelligence, dogfight progressively transits towards intelligent and autonomous modes. However, the development of autonomous dogfight policy learning is hindered by challenges such as weak exploration capabilities, low learning efficiency, and unrealistic simulated environments. To overcome these challenges, this paper proposes a novel imitative reinforcement learning framework, which efficiently leverages expert data while enabling autonomous exploration. The proposed framework not only enhances learning efficiency through expert imitation, but also ensures adaptability to dynamic environments via autonomous exploration with reinforcement learning. Therefore, the proposed framework can learn a successful dogfight policy of 'pursuit-lock-launch' for UCAVs. To support data-driven learning, we establish a dogfight environment based on the Harfang3D sandbox, where we conduct extensive experiments. The results indicate that the proposed framework excels in multistage dogfight, significantly outperforms state-of-the-art reinforcement learning and imitation learning methods. Thanks to the ability of imitating experts and autonomous exploration, our framework can quickly learn the critical knowledge in complex aerial combat tasks, achieving up to a 100% success rate and demonstrating excellent robustness.
Auxiliary Reward Generation with Transition Distance Representation Learning
Feb 12, 2024



Reinforcement learning (RL) has shown its strength in challenging sequential decision-making problems. The reward function in RL is crucial to the learning performance, as it serves as a measure of the task completion degree. In real-world problems, the rewards are predominantly human-designed, which requires laborious tuning, and is easily affected by human cognitive biases. To achieve automatic auxiliary reward generation, we propose a novel representation learning approach that can measure the ``transition distance'' between states. Building upon these representations, we introduce an auxiliary reward generation technique for both single-task and skill-chaining scenarios without the need for human knowledge. The proposed approach is evaluated in a wide range of manipulation tasks. The experiment results demonstrate the effectiveness of measuring the transition distance between states and the induced improvement by auxiliary rewards, which not only promotes better learning efficiency but also increases convergent stability.
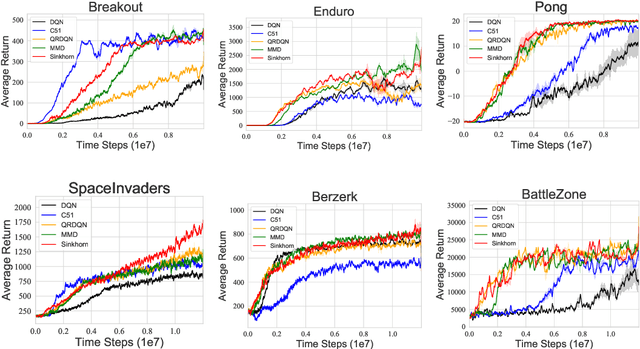
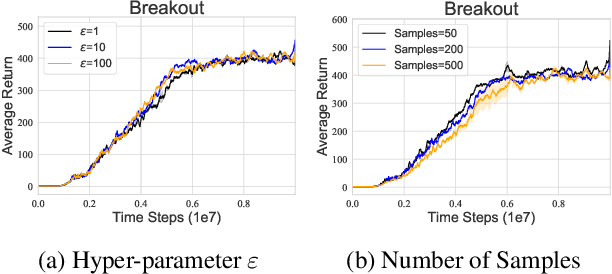
Distributional Reinforcement Learning via Sinkhorn Iterations
Feb 16, 2022
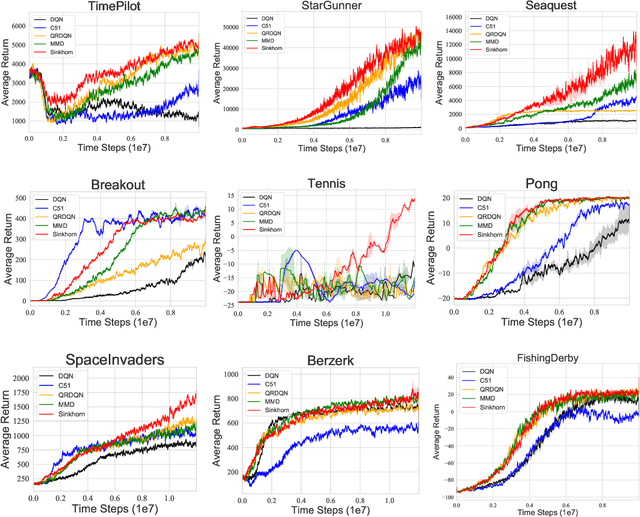
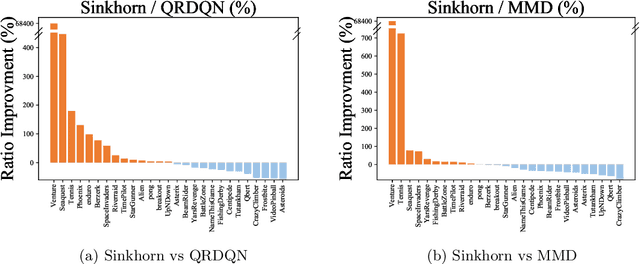
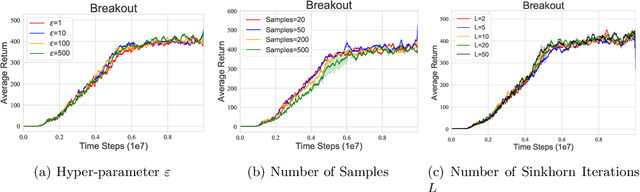
Distributional reinforcement learning~(RL) is a class of state-of-the-art algorithms that estimate the whole distribution of the total return rather than only its expectation. The representation manner of each return distribution and the choice of distribution divergence are pivotal for the empirical success of distributional RL. In this paper, we propose a new class of \textit{Sinkhorn distributional RL} algorithm that learns a finite set of statistics, i.e., deterministic samples, from each return distribution and then leverages Sinkhorn iterations to evaluate the Sinkhorn distance between the current and target Bellmen distributions. Remarkably, as Sinkhorn divergence interpolates between the Wasserstein distance and Maximum Mean Discrepancy~(MMD). This allows our proposed Sinkhorn distributional RL algorithms to find a sweet spot leveraging the geometry of optimal transport-based distance, and the unbiased gradient estimates of MMD. Finally, experiments on a suite of Atari games reveal the competitive performance of Sinkhorn distributional RL algorithm as opposed to existing state-of-the-art algorithms.
Damped Anderson Mixing for Deep Reinforcement Learning: Acceleration, Convergence, and Stabilization
Oct 20, 2021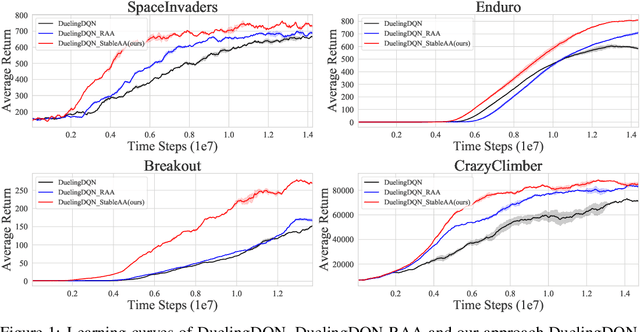
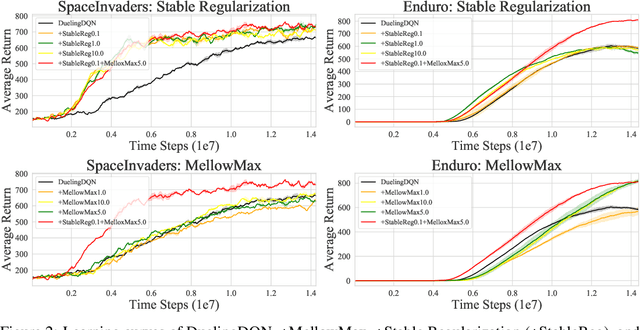
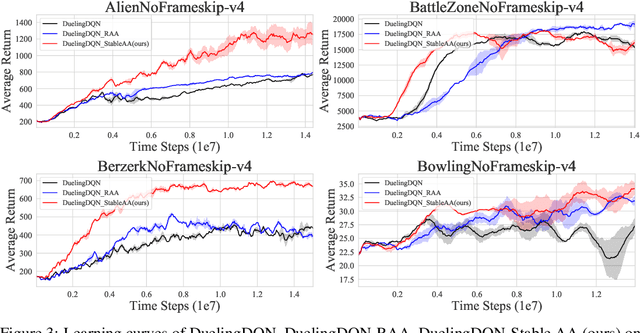
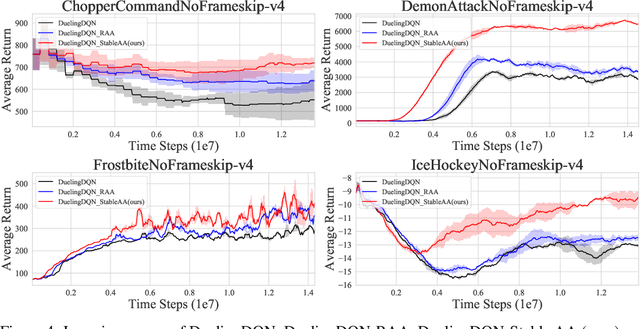
Anderson mixing has been heuristically applied to reinforcement learning (RL) algorithms for accelerating convergence and improving the sampling efficiency of deep RL. Despite its heuristic improvement of convergence, a rigorous mathematical justification for the benefits of Anderson mixing in RL has not yet been put forward. In this paper, we provide deeper insights into a class of acceleration schemes built on Anderson mixing that improve the convergence of deep RL algorithms. Our main results establish a connection between Anderson mixing and quasi-Newton methods and prove that Anderson mixing increases the convergence radius of policy iteration schemes by an extra contraction factor. The key focus of the analysis roots in the fixed-point iteration nature of RL. We further propose a stabilization strategy by introducing a stable regularization term in Anderson mixing and a differentiable, non-expansive MellowMax operator that can allow both faster convergence and more stable behavior. Extensive experiments demonstrate that our proposed method enhances the convergence, stability, and performance of RL algorithms.
Towards Understanding Distributional Reinforcement Learning: Regularization, Optimization, Acceleration and Sinkhorn Algorithm
Oct 07, 2021
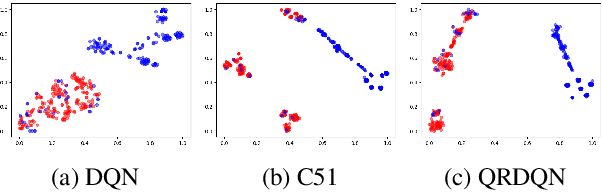
Distributional reinforcement learning~(RL) is a class of state-of-the-art algorithms that estimate the whole distribution of the total return rather than only its expectation. Despite the remarkable performance of distributional RL, a theoretical understanding of its advantages over expectation-based RL remains elusive. In this paper, we interpret distributional RL as entropy-regularized maximum likelihood estimation in the \textit{neural Z-fitted iteration} framework, and establish the connection of the resulting risk-aware regularization with maximum entropy RL. In addition, We shed light on the stability-promoting distributional loss with desirable smoothness properties in distributional RL, which can yield stable optimization and guaranteed generalization. We also analyze the acceleration behavior while optimizing distributional RL algorithms and show that an appropriate approximation to the true target distribution can speed up the convergence. From the perspective of representation, we find that distributional RL encourages state representation from the same action class classified by the policy in tighter clusters. Finally, we propose a class of \textit{Sinkhorn distributional RL} algorithm that interpolates between the Wasserstein distance and maximum mean discrepancy~(MMD). Experiments on a suite of Atari games reveal the competitive performance of our algorithm relative to existing state-of-the-art distributional RL algorithms.