 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Role of Explainability in Assuring Safety of Machine Learning in Healthcare
Sep 01, 2021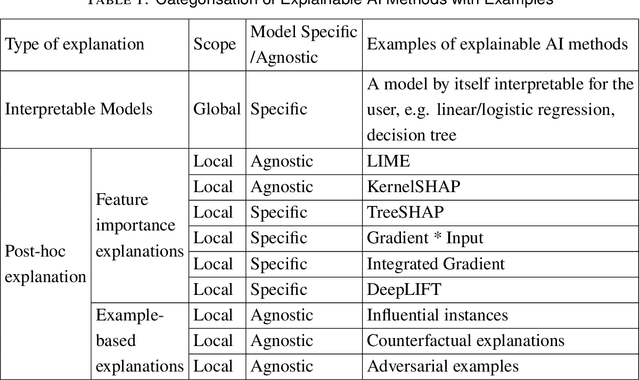
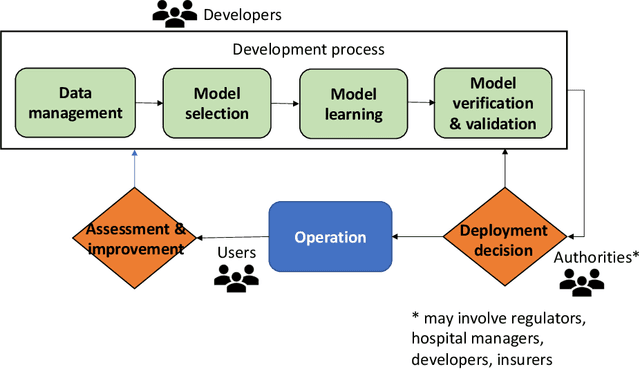
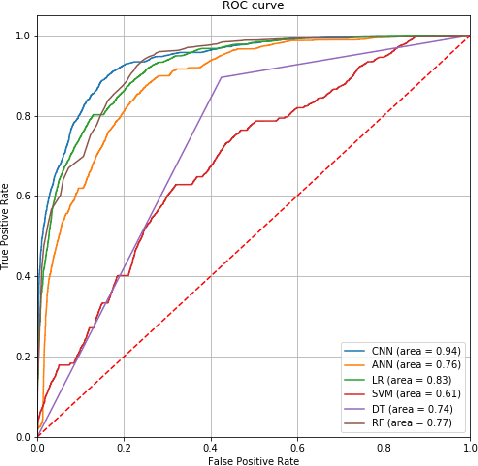
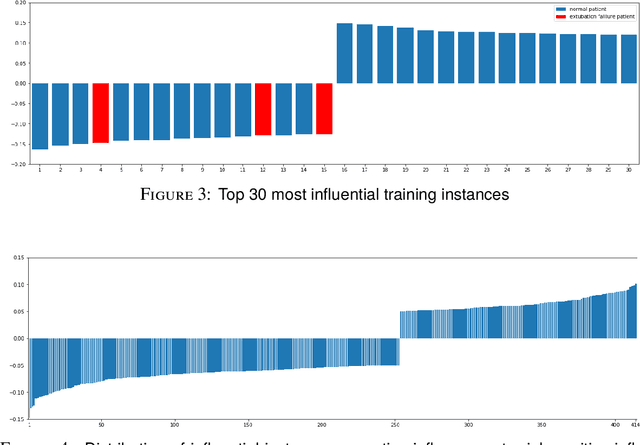
Established approaches to assuring safety-critical systems and software are difficult to apply to systems employing machine learning (ML). In many cases, ML is used on ill-defined problems, e.g. optimising sepsis treatment, where there is no clear, pre-defined specification against which to assess validity. This problem is exacerbated by the "opaque" nature of ML where the learnt model is not amenable to human scrutiny. Explainable AI methods have been proposed to tackle this issue by producing human-interpretable representations of ML models which can help users to gain confidence and build trust in the ML system. However, there is not much work explicitly investigating the role of explainability for safety assurance in the context of ML development. This paper identifies ways in which explainable AI methods can contribute to safety assurance of ML-based systems. It then uses a concrete ML-based clinical decision support system, concerning weaning of patients from mechanical ventilation, to demonstrate how explainable AI methods can be employed to produce evidence to support safety assurance. The results are also represented in a safety argument to show where, and in what way, explainable AI methods can contribute to a safety case. Overall, we conclude that explainable AI methods have a valuable role in safety assurance of ML-based systems in healthcare but that they are not sufficient in themselves to assure safety.
The DKU System Description for The Interspeech 2021 Auto-KWS Challenge
Apr 11, 2021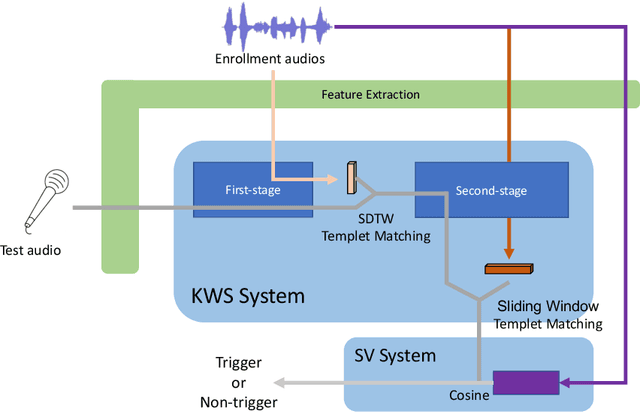
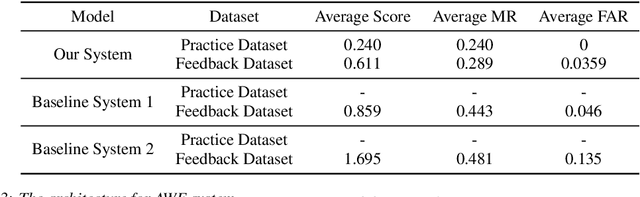
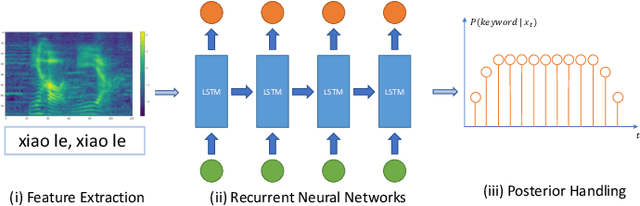
This paper introduces the system submitted by the DKU-SMIIP team for the Auto-KWS 2021 Challenge. Our implementation consists of a two-stage keyword spotting system based on query-by-example spoken term detection and a speaker verification system. We employ two different detection algorithms in our proposed keyword spotting system. The first stage adopts subsequence dynamic time warping for template matching based on frame-level language-independent bottleneck feature and phoneme posterior probability. We use a sliding window template matching algorithm based on acoustic word embeddings to further verify the detection from the first stage. As a result, our KWS system achieves an average score of 0.61 on the feedback dataset, which outperforms the baseline1 system by 0.25.
Guidance on the Assurance of Machine Learning in Autonomous Systems
Feb 02, 2021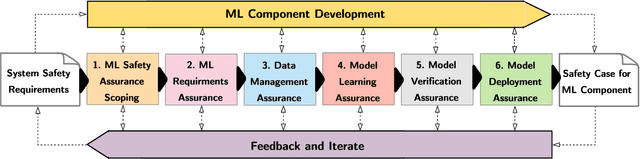
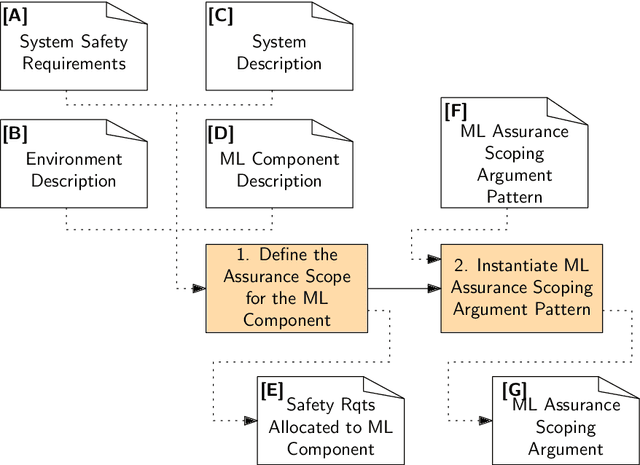
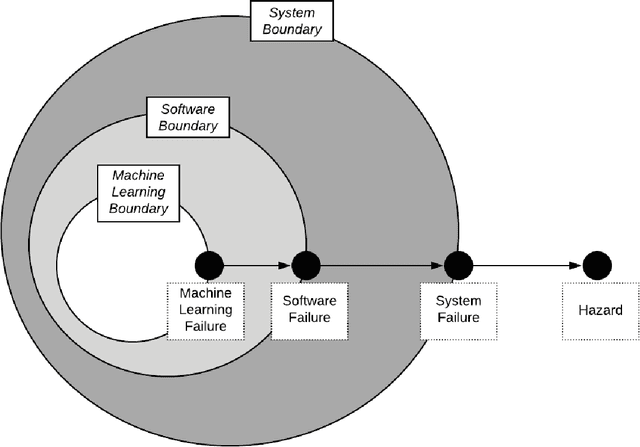
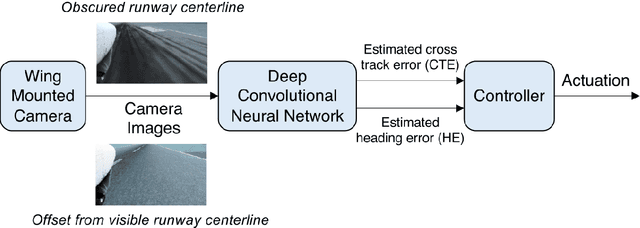
Machine Learning (ML) is now used in a range of systems with results that are reported to exceed, under certain conditions, human performance. Many of these systems, in domains such as healthcare , automotive and manufacturing, exhibit high degrees of autonomy and are safety critical. Establishing justified confidence in ML forms a core part of the safety case for these systems. In this document we introduce a methodology for the Assurance of Machine Learning for use in Autonomous Systems (AMLAS). AMLAS comprises a set of safety case patterns and a process for (1) systematically integrating safety assurance into the development of ML components and (2) for generating the evidence base for explicitly justifying the acceptable safety of these components when integrated into autonomous system applications.
A Framework for Assurance of Medication Safety using Machine Learning
Jan 11, 2021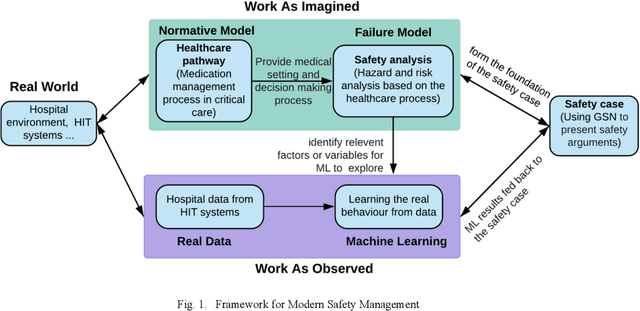
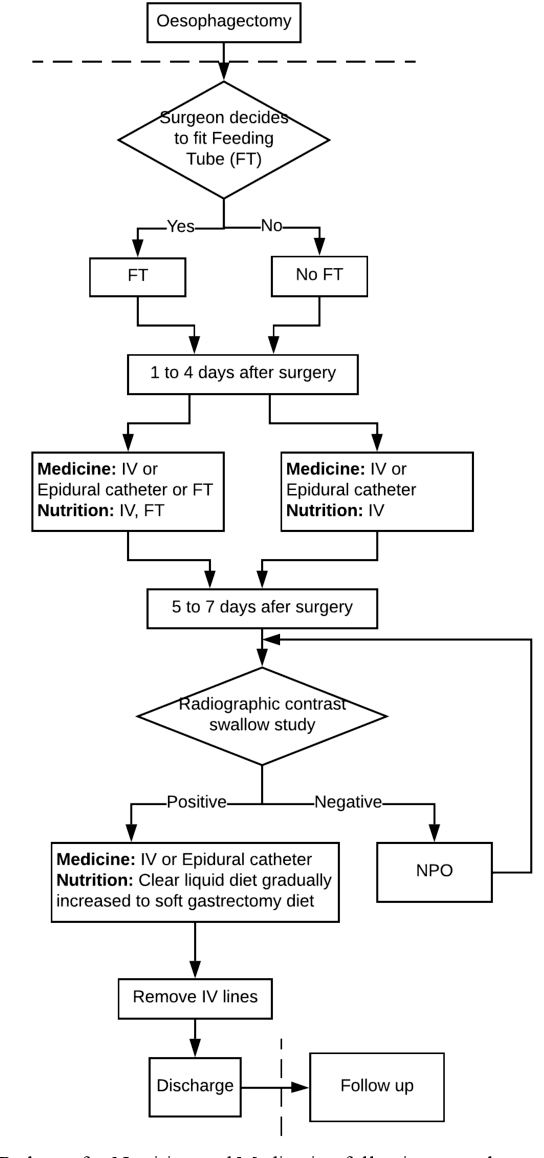
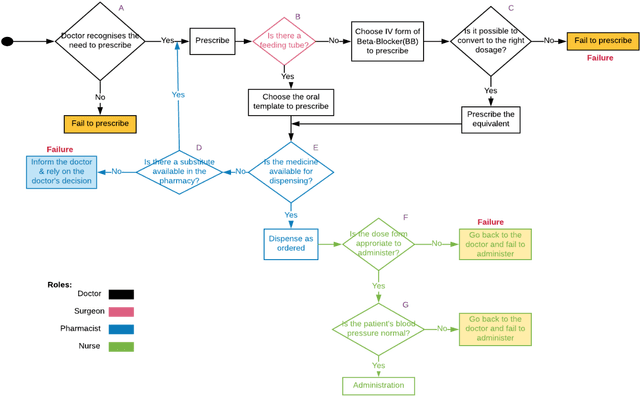
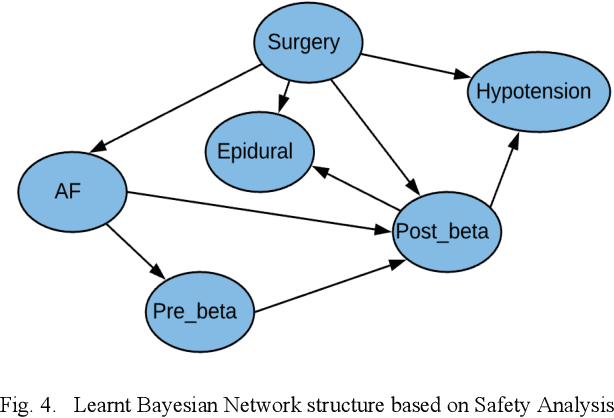
Medication errors continue to be the leading cause of avoidable patient harm in hospitals. This paper sets out a framework to assure medication safety that combines machine learning and safety engineering methods. It uses safety analysis to proactively identify potential causes of medication error, based on expert opinion. As healthcare is now data rich, it is possible to augment safety analysis with machine learning to discover actual causes of medication error from the data, and to identify where they deviate from what was predicted in the safety analysis. Combining these two views has the potential to enable the risk of medication errors to be managed proactively and dynamically. We apply the framework to a case study involving thoracic surgery, e.g. oesophagectomy, where errors in giving beta-blockers can be critical to control atrial fibrillation. This case study combines a HAZOP-based safety analysis method known as SHARD with Bayesian network structure learning and process mining to produce the analysis results, showing the potential of the framework for ensuring patient safety, and for transforming the way that safety is managed in complex healthcare environments.
The 2020 Personalized Voice Trigger Challenge: Open Database, Evaluation Metrics and the Baseline Systems
Jan 06, 2021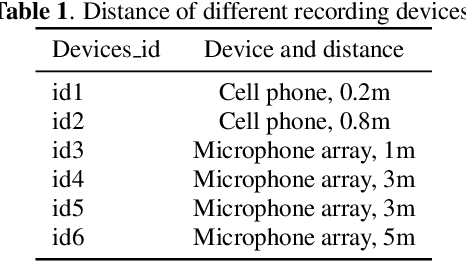
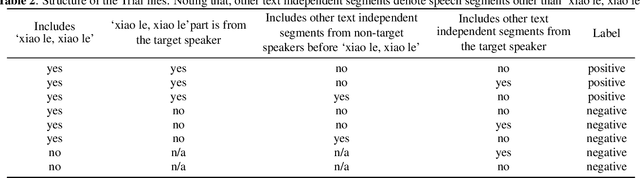
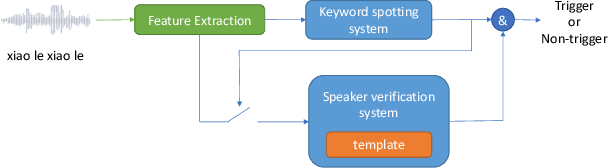
The 2020 Personalized Voice Trigger Challenge (PVTC2020) addresses two different research problems a unified setup: joint wake-up word detection with speaker verification on close-talking single microphone data and far-field multi-channel microphone array data. Specially, the second task poses an additional cross-channel matching challenge on top of the far-field condition. To simulate the real-life application scenario, the enrollment utterances are recorded from close-talking cell-phone only, while the test utterances are recorded from both the close-talking cell-phone and the far-field microphone arrays. This paper introduces our challenge setup and the released database as well as the evaluation metrics. In addition, we present a joint end-to-end neural network baseline system trained with the proposed database for speaker-dependent wake-up word detection. Results show that the cost calculated from the miss rate and the false alarm rate, can reach 0.37 in the close-talking single microphone task and 0.31 in the far-field microphone array task. The official website and the open-source baseline system have been released.
Training Wake Word Detection with Synthesized Speech Data on Confusion Words
Nov 03, 2020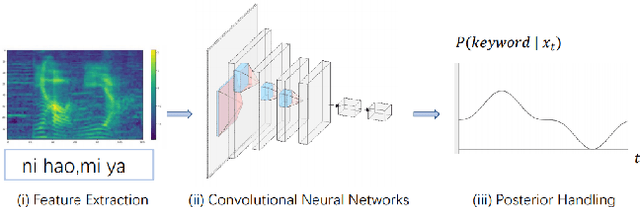
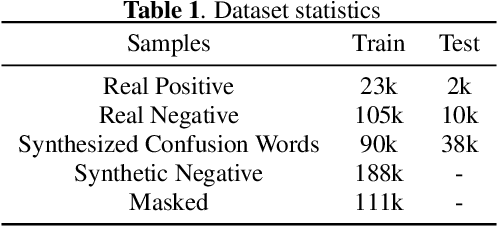
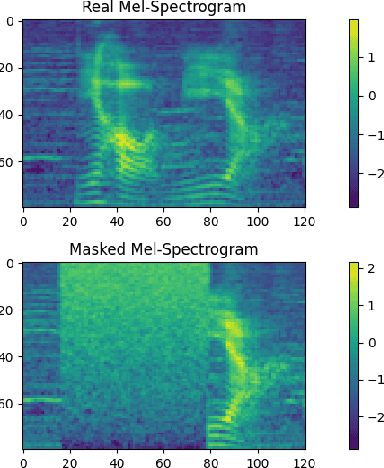
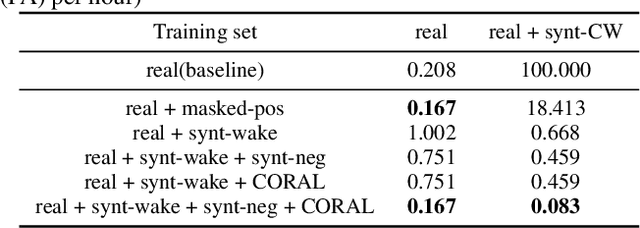
Confusing-words are commonly encountered in real-life keyword spotting applications, which causes severe degradation of performance due to complex spoken terms and various kinds of words that sound similar to the predefined keywords. To enhance the wake word detection system's robustness on such scenarios, we investigate two data augmentation setups for training end-to-end KWS systems. One is involving the synthesized data from a multi-speaker speech synthesis system, and the other augmentation is performed by adding random noise to the acoustic feature. Experimental results show that augmentations help improve the system's robustness. Moreover, by augmenting the training set with the synthetic data generated by the multi-speaker text-to-speech system, we achieve a significant improvement regarding confusing words scenario.
Domain Aware Training for Far-field Small-footprint Keyword Spotting
May 16, 2020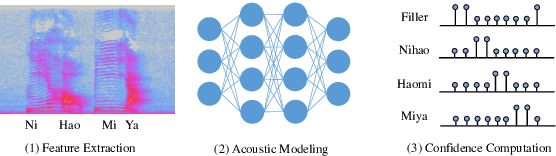
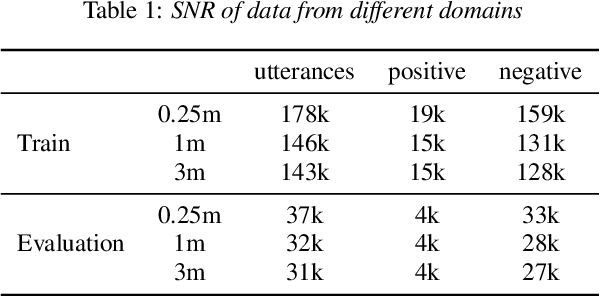
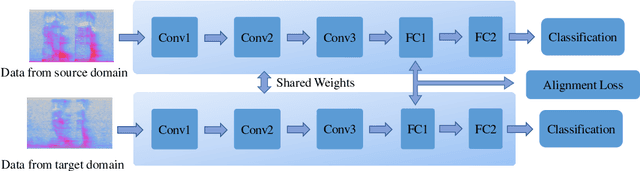
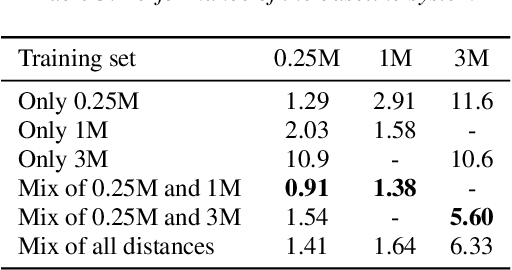
In this paper, we focus on the task of small-footprint keyword spotting under the far-field scenario. Far-field environments are commonly encountered in real-life speech applications, causing severe degradation of performance due to room reverberation and various kinds of noises. Our baseline system is built on the convolutional neural network trained with pooled data of both far-field and close-talking speech. To cope with the distortions, we develop three domain aware training systems, including the domain embedding system, the deep CORAL system, and the multi-task learning system. These methods incorporate domain knowledge into network training and improve the performance of the keyword classifier on far-field conditions. Experimental results show that our proposed methods manage to maintain the performance on the close-talking speech and achieve significant improvement on the far-field test set.
CPG-Based Control Scheme for Quadruped Robot to Withstand the Lateral Impact
Nov 21, 2017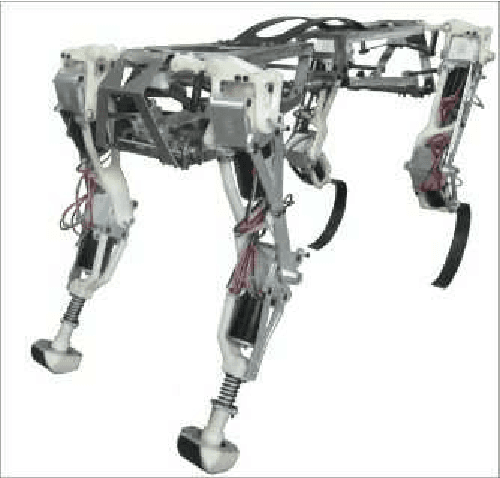
This paper aims to present a stability control strategy for quadruped robot under lateral impact with the help of lateral trot. We firstly propose five necessary conditions for keeping balance. The classical four-neuron Central Pattern Generator (CPG) network with Hopf oscillators is then extended to eight-neuron network with four more trigger-enabled neurons, which controls the lateral trot. With proper adjustment of network's parameters, such network can coordinate the lateral and longitudinal trot gait. Based on Zero Movement Point (ZMP) theory, the robot is modeled as an inverted pendulum to plan the Center of Gravity (CoG) position and calculate the needed lateral step length. The simulation shows that the lateral acceleration of the quadruped robot after lateral impact regains to the normal range in a short time. Comparison shows that the maximal lateral impact that robot can resist increases about 125% from 0.72g to 1.55g.
* extended and translated version of a Chinese journal paper