 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMind the Prompt: Self-adaptive Generation of Task Plan Explanations via LLMs
Apr 22, 2026Integrating Large Language Models (LLMs) into complex software systems enables the generation of human-understandable explanations of opaque AI processes, such as automated task planning. However, the quality and reliability of these explanations heavily depend on effective prompt engineering. The lack of a systematic understanding of how diverse stakeholder groups formulate and refine prompts hinders the development of tools that can automate this process. We introduce COMPASS (COgnitive Modelling for Prompt Automated SynthesiS), a proof-of-concept self-adaptive approach that formalises prompt engineering as a cognitive and probabilistic decision-making process. COMPASS models unobservable users' latent cognitive states, such as attention and comprehension, uncertainty, and observable interaction cues as a POMDP, whose synthesised policy enables adaptive generation of explanations and prompt refinements. We evaluate COMPASS using two diverse cyber-physical system case studies to assess the adaptive explanation generation and their qualities, both quantitatively and qualitatively. Our results demonstrate the feasibility of COMPASS integrating human cognition and user profile's feedback into automated prompt synthesis in complex task planning systems.
Hazard Management in Robot-Assisted Mammography Support
Apr 07, 2026Robotic and embodied-AI systems have the potential to improve accessibility and quality of care in clinical settings, but their deployment in close physical contact with vulnerable patients introduces significant safety risks. This paper presents a hazard management methodology for MammoBot, an assistive robotic system designed to support patients during X-ray mammography. To ensure safety from early development stages, we combine stakeholder-guided process modelling with Software Hazard Analysis and Resolution in Design (SHARD) and System-Theoretic Process Analysis (STPA). The robot-assisted workflow is defined collaboratively with clinicians, roboticists, and patient representatives to capture key human-robot interactions. SHARD is applied to identify technical and procedural deviations, while STPA is used to analyse unsafe control actions arising from user interaction. The results show that many hazards arise not from component failures, but from timing mismatches, premature actions, and misinterpretation of system state. These hazards are translated into refined and additional safety requirements that constrain system behaviour and reduce reliance on correct human timing or interpretation alone. The work demonstrates a structured and traceable approach to safety-driven design with potential applicability to assistive robotic systems in clinical environments.
Interpretable Attention-Based Multi-Agent PPO for Latency Spike Resolution in 6G RAN Slicing
Feb 11, 2026Sixth-generation (6G) radio access networks (RANs) must enforce strict service-level agreements (SLAs) for heterogeneous slices, yet sudden latency spikes remain difficult to diagnose and resolve with conventional deep reinforcement learning (DRL) or explainable RL (XRL). We propose \emph{Attention-Enhanced Multi-Agent Proximal Policy Optimization (AE-MAPPO)}, which integrates six specialized attention mechanisms into multi-agent slice control and surfaces them as zero-cost, faithful explanations. The framework operates across O-RAN timescales with a three-phase strategy: predictive, reactive, and inter-slice optimization. A URLLC case study shows AE-MAPPO resolves a latency spike in $18$ms, restores latency to $0.98$ms with $99.9999\%$ reliability, and reduces troubleshooting time by $93\%$ while maintaining eMBB and mMTC continuity. These results confirm AE-MAPPO's ability to combine SLA compliance with inherent interpretability, enabling trustworthy and real-time automation for 6G RAN slicing.
Symbolic Runtime Verification and Adaptive Decision-Making for Robot-Assisted Dressing
Apr 22, 2025We present a control framework for robot-assisted dressing that augments low-level hazard response with runtime monitoring and formal verification. A parametric discrete-time Markov chain (pDTMC) models the dressing process, while Bayesian inference dynamically updates this pDTMC's transition probabilities based on sensory and user feedback. Safety constraints from hazard analysis are expressed in probabilistic computation tree logic, and symbolically verified using a probabilistic model checker. We evaluate reachability, cost, and reward trade-offs for garment-snag mitigation and escalation, enabling real-time adaptation. Our approach provides a formal yet lightweight foundation for safety-aware, explainable robotic assistance.
Safe Reinforcement Learning in Black-Box Environments via Adaptive Shielding
May 28, 2024Empowering safe exploration of reinforcement learning (RL) agents during training is a critical impediment towards deploying RL agents in many real-world scenarios. Training RL agents in unknown, black-box environments poses an even greater safety risk when prior knowledge of the domain/task is unavailable. We introduce ADVICE (Adaptive Shielding with a Contrastive Autoencoder), a novel post-shielding technique that distinguishes safe and unsafe features of state-action pairs during training, thus protecting the RL agent from executing actions that yield potentially hazardous outcomes. Our comprehensive experimental evaluation against state-of-the-art safe RL exploration techniques demonstrates how ADVICE can significantly reduce safety violations during training while maintaining a competitive outcome reward.
Out-of-distribution Object Detection through Bayesian Uncertainty Estimation
Oct 29, 2023



The superior performance of object detectors is often established under the condition that the test samples are in the same distribution as the training data. However, in many practical applications, out-of-distribution (OOD) instances are inevitable and usually lead to uncertainty in the results. In this paper, we propose a novel, intuitive, and scalable probabilistic object detection method for OOD detection. Unlike other uncertainty-modeling methods that either require huge computational costs to infer the weight distributions or rely on model training through synthetic outlier data, our method is able to distinguish between in-distribution (ID) data and OOD data via weight parameter sampling from proposed Gaussian distributions based on pre-trained networks. We demonstrate that our Bayesian object detector can achieve satisfactory OOD identification performance by reducing the FPR95 score by up to 8.19% and increasing the AUROC score by up to 13.94% when trained on BDD100k and VOC datasets as the ID datasets and evaluated on COCO2017 dataset as the OOD dataset.
Robust Uncertainty Quantification using Conformalised Monte Carlo Prediction
Aug 18, 2023



Deploying deep learning models in safety-critical applications remains a very challenging task, mandating the provision of assurances for the dependable operation of these models. Uncertainty quantification (UQ) methods estimate the model's confidence per prediction, informing decision-making by considering the effect of randomness and model misspecification. Despite the advances of state-of-the-art UQ methods, they are computationally expensive or produce conservative prediction sets/intervals. We introduce MC-CP, a novel hybrid UQ method that combines a new adaptive Monte Carlo (MC) dropout method with conformal prediction (CP). MC-CP adaptively modulates the traditional MC dropout at runtime to save memory and computation resources, enabling predictions to be consumed by CP, yielding robust prediction sets/intervals. Throughout comprehensive experiments, we show that MC-CP delivers significant improvements over advanced UQ methods, like MC dropout, RAPS and CQR, both in classification and regression benchmarks. MC-CP can be easily added to existing models, making its deployment simple.
Bayesian Learning for the Robust Verification of Autonomous Robots
Mar 15, 2023We develop a novel Bayesian learning framework that enables the runtime verification of autonomous robots performing critical missions in uncertain environments. Our framework exploits prior knowledge and observations of the verified robotic system to learn expected ranges of values for the occurrence rates of its events. We support both events observed regularly during system operation, and singular events such as catastrophic failures or the completion of difficult one-off tasks. Furthermore, we use the learnt event-rate ranges to assemble interval continuous-time Markov models, and we apply quantitative verification to these models to compute expected intervals of variation for key system properties. These intervals reflect the uncertainty intrinsic to many real-world systems, enabling the robust verification of their quantitative properties under parametric uncertainty. We apply the proposed framework to the case study of verification of an autonomous robotic mission for underwater infrastructure inspection and repair.
Closed-loop Analysis of Vision-based Autonomous Systems: A Case Study
Feb 06, 2023Deep neural networks (DNNs) are increasingly used in safety-critical autonomous systems as perception components processing high-dimensional image data. Formal analysis of these systems is particularly challenging due to the complexity of the perception DNNs, the sensors (cameras), and the environment conditions. We present a case study applying formal probabilistic analysis techniques to an experimental autonomous system that guides airplanes on taxiways using a perception DNN. We address the above challenges by replacing the camera and the network with a compact probabilistic abstraction built from the confusion matrices computed for the DNN on a representative image data set. We also show how to leverage local, DNN-specific analyses as run-time guards to increase the safety of the overall system. Our findings are applicable to other autonomous systems that use complex DNNs for perception.
Towards Adaptive Planning of Assistive-care Robot Tasks
Sep 28, 2022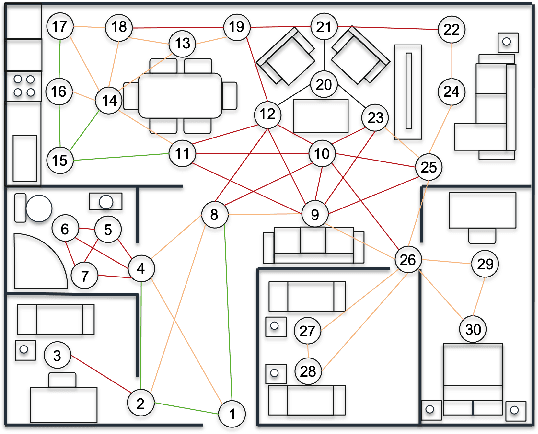

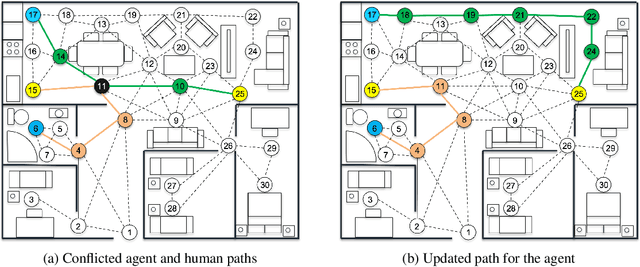
This 'research preview' paper introduces an adaptive path planning framework for robotic mission execution in assistive-care applications. The framework provides a graph-based environment modelling approach, with dynamic path finding performed using Dijkstra's algorithm. A predictive module that uses probabilistic model checking is applied to estimate the human's movement through the environment, allowing run-time re-planning of the robot's path. We illustrate the use of the framework for a simulated assistive-care case study in which a mobile robot navigates through the environment and monitors an end user with mild physical or cognitive impairments.
* In Proceedings FMAS2022 ASYDE2022, arXiv:2209.13181