 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVerifier-Free RL for LLMs via Intrinsic Gradient-Norm Reward
May 11, 2026While Reinforcement Learning with Verifiable Rewards (RLVR) has recently emerged as a promising post-training paradigm for Large Language Models (LLMs), its dependency on the gold label or domain-specific verifiers limits its scalability to new tasks and domains. In this work, we propose Verifier-free Intrinsic Gradient-Norm Reward (VIGOR), a simple reward that uses only the policy model itself. Given a prompt, VIGOR samples a group of completions and assigns higher within-group rewards to outputs that induce smaller $\ell_2$ norms of the teacher-forced negative log-likelihood gradients under the current parameters. Intuitively, lower gradient norms suggest the completion aligns better with the current policy, serving as an intrinsic preference signal for policy optimization. To make this intrinsic signal practical for RL, we correct the systematic length bias of averaged token-level gradients with a $\sqrt{T}$ scaling, and apply group-wise rank shaping to stabilize reward scales across prompts. Across mathematical reasoning benchmarks, VIGOR outperforms the state-of-the-art Reinforcement Learning from Internal Feedback (RLIF) baseline, and it also exhibits cross-domain transfer to code benchmarks when trained only on math data. For instance, on Qwen2.5-7B-Base post-trained on MATH, VIGOR improves the average math accuracy by +3.31% and the average code accuracy by +1.91% over this baseline, while exhibiting more stable training dynamics. The code is available at https://github.com/ZJUSCL/VIGOR.
IGFuse: Interactive 3D Gaussian Scene Reconstruction via Multi-Scans Fusion
Aug 18, 2025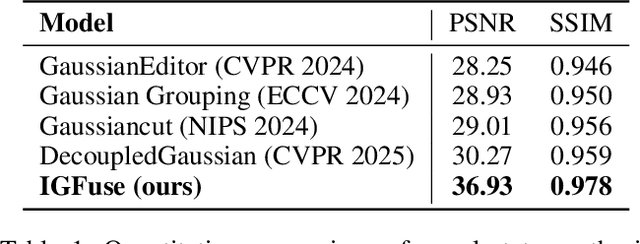
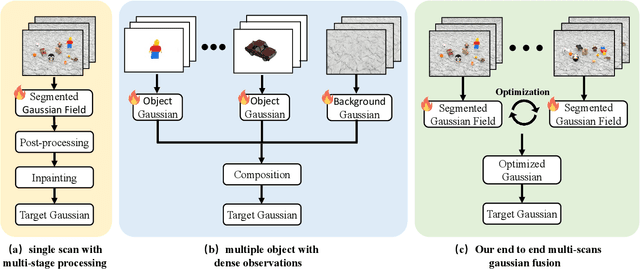
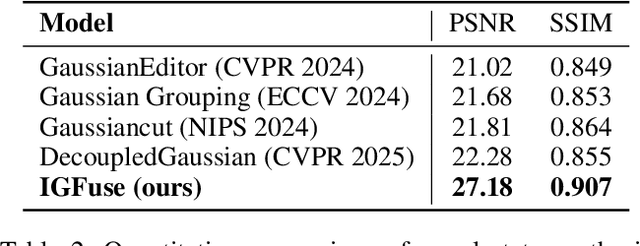
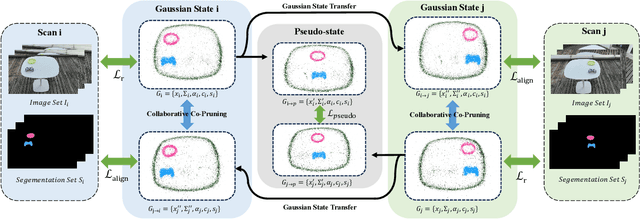
Reconstructing complete and interactive 3D scenes remains a fundamental challenge in computer vision and robotics, particularly due to persistent object occlusions and limited sensor coverage. Multiview observations from a single scene scan often fail to capture the full structural details. Existing approaches typically rely on multi stage pipelines, such as segmentation, background completion, and inpainting or require per-object dense scanning, both of which are error-prone, and not easily scalable. We propose IGFuse, a novel framework that reconstructs interactive Gaussian scene by fusing observations from multiple scans, where natural object rearrangement between captures reveal previously occluded regions. Our method constructs segmentation aware Gaussian fields and enforces bi-directional photometric and semantic consistency across scans. To handle spatial misalignments, we introduce a pseudo-intermediate scene state for unified alignment, alongside collaborative co-pruning strategies to refine geometry. IGFuse enables high fidelity rendering and object level scene manipulation without dense observations or complex pipelines. Extensive experiments validate the framework's strong generalization to novel scene configurations, demonstrating its effectiveness for real world 3D reconstruction and real-to-simulation transfer. Our project page is available online.
AuroraLong: Bringing RNNs Back to Efficient Open-Ended Video Understanding
Jul 03, 2025The challenge of long video understanding lies in its high computational complexity and prohibitive memory cost, since the memory and computation required by transformer-based LLMs scale quadratically with input sequence length. We propose AuroraLong to address this challenge by replacing the LLM component in MLLMs with a linear RNN language model that handles input sequence of arbitrary length with constant-size hidden states. To further increase throughput and efficiency, we combine visual token merge with linear RNN models by reordering the visual tokens by their sizes in ascending order. Despite having only 2B parameters and being trained exclusively on public data, AuroraLong achieves performance comparable to Transformer-based models of similar size trained on private datasets across multiple video benchmarks. This demonstrates the potential of efficient, linear RNNs to democratize long video understanding by lowering its computational entry barrier. To our best knowledge, we are the first to use a linear RNN based LLM backbone in a LLaVA-like model for open-ended video understanding.
DSG-World: Learning a 3D Gaussian World Model from Dual State Videos
Jun 05, 2025Building an efficient and physically consistent world model from limited observations is a long standing challenge in vision and robotics. Many existing world modeling pipelines are based on implicit generative models, which are hard to train and often lack 3D or physical consistency. On the other hand, explicit 3D methods built from a single state often require multi-stage processing-such as segmentation, background completion, and inpainting-due to occlusions. To address this, we leverage two perturbed observations of the same scene under different object configurations. These dual states offer complementary visibility, alleviating occlusion issues during state transitions and enabling more stable and complete reconstruction. In this paper, we present DSG-World, a novel end-to-end framework that explicitly constructs a 3D Gaussian World model from Dual State observations. Our approach builds dual segmentation-aware Gaussian fields and enforces bidirectional photometric and semantic consistency. We further introduce a pseudo intermediate state for symmetric alignment and design collaborative co-pruning trategies to refine geometric completeness. DSG-World enables efficient real-to-simulation transfer purely in the explicit Gaussian representation space, supporting high-fidelity rendering and object-level scene manipulation without relying on dense observations or multi-stage pipelines. Extensive experiments demonstrate strong generalization to novel views and scene states, highlighting the effectiveness of our approach for real-world 3D reconstruction and simulation.
Pointmap Association and Piecewise-Plane Constraint for Consistent and Compact 3D Gaussian Segmentation Field
Feb 22, 2025Achieving a consistent and compact 3D segmentation field is crucial for maintaining semantic coherence across views and accurately representing scene structures. Previous 3D scene segmentation methods rely on video segmentation models to address inconsistencies across views, but the absence of spatial information often leads to object misassociation when object temporarily disappear and reappear. Furthermore, in the process of 3D scene reconstruction, segmentation and optimization are often treated as separate tasks. As a result, optimization typically lacks awareness of semantic category information, which can result in floaters with ambiguous segmentation. To address these challenges, we introduce CCGS, a method designed to achieve both view consistent 2D segmentation and a compact 3D Gaussian segmentation field. CCGS incorporates pointmap association and a piecewise-plane constraint. First, we establish pixel correspondence between adjacent images by minimizing the Euclidean distance between their pointmaps. We then redefine object mask overlap accordingly. The Hungarian algorithm is employed to optimize mask association by minimizing the total matching cost, while allowing for partial matches. To further enhance compactness, the piecewise-plane constraint restricts point displacement within local planes during optimization, thereby preserving structural integrity. Experimental results on ScanNet and Replica datasets demonstrate that CCGS outperforms existing methods in both 2D panoptic segmentation and 3D Gaussian segmentation.