 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Long-Horizon Vessel Trajectory and Destination Forecasting with Reasoning Large Language Models
Jun 07, 2026Long-horizon maritime trajectory prediction is important for shipping management, logistics planning, and maritime risk analysis, yet month-level forecasting remains insufficiently studied. Existing deep learning methods mainly focus on short- and mid-term coordinate extrapolation and often struggle to preserve route feasibility and destination correctness over extended horizons. This paper investigates joint long-horizon vessel trajectory and destination forecasting with reasoning-capable large language models, and develops a Maritime LLM post-training framework based on Reinforcement Learning with Verifiable Reward (RLVR). An AIS-based benchmark is constructed with 60-day historical trajectories and 30-day forecasting horizons, where trajectories are converted into semantic textual representations for RL prompt construction. RLVR aligns LLMs with maritime forecasting objectives by enforcing physical validity, providing early-weighted trajectory supervision, and evaluating destination correctness through hierarchical matching and curriculum learning. Experimental results show that RLVR-trained LLMs substantially improve over zero-shot LLMs and representative deep learning baselines, especially on destination-related metrics. Among the evaluated RLVR-trained variants, 4B LLMs achieve the best overall performance, suggesting that reward-compatible optimization and task-specific capacity matching are more important than simply using larger 8B or 14B LLMs. The results also show that LSTM remains a strong deep learning baseline under limited fine-tuning data, while Transformer-style spatio-temporal models typically require larger datasets and richer structured inputs. Overall, this work advances semantic, verifier-aligned maritime forecasting for operational decision support.
CobSeg: Coherence Boundary Modeling for Dialogue Topic Segmentation
May 29, 2026Dialogue topic segmentation is critical in many human-AI collaborative applications which requires identifying heterogeneous boundary cues, including lexical transitions near utterance edges and semantic discontinuities across utterances. Existing utterance models often dilute these local lexical signals. We propose CobSeg, a novel multi-branch architecture that separates coherence-level semantic continuity from lexical boundary transitions and recovers both through directional boundary prediction. CobSeg further uses boundary informativeness weighting to emphasize high-utility utterance positions, and incorporates a corpus-derived topic coherence cue with learned combination weights. While CobSeg is evaluated as a compact trainable segmenter under supervised gold-boundary training and a pseudo-label setting with automatically induced boundaries, it performs enhanced boundary prediction without LLM calls during inference. Across five benchmarks, it improves $P_k$ and $W_d$ particularly when local lexical cues are prominent: under gold supervision, it reduces $P_k$ by 0.7 points and $W_d$ by 0.6 points on VHF, and reaches $P_k$ of 1.0 on DialSeg711; with induced boundaries, it reduces $P_k$ by 14.8 points on VHF, by 1.5 points on DialSeg711, and by 1.1 points on TIAGE, outperforming prior non-LLM approaches.
From Vessel Trajectories to Safety-Critical Encounter Scenarios: A Generative AI Framework for Autonomous Ship Digital Testing
Mar 30, 2026Digital testing has emerged as a key paradigm for the development and verification of autonomous maritime navigation systems, yet the availability of realistic and diverse safety-critical encounter scenarios remains limited. Existing approaches either rely on handcrafted templates, which lack realism, or extract cases directly from historical data, which cannot systematically expand rare high-risk situations. This paper proposes a data-driven framework that converts large-scale Automatic Identification System (AIS) trajectories into structured safety-critical encounter scenarios. The framework combines generative trajectory modeling with automated encounter pairing and temporal parameterization to enable scalable scenario construction while preserving real traffic characteristics. To enhance trajectory realism and robustness under noisy AIS observations, a multi-scale temporal variational autoencoder is introduced to capture vessel motion dynamics across different temporal resolutions. Experiments on real-world maritime traffic flows demonstrate that the proposed method improves trajectory fidelity and smoothness, maintains statistical consistency with observed data, and enables the generation of diverse safety-critical encounter scenarios beyond those directly recorded. The resulting framework provides a practical pathway for building scenario libraries to support digital testing, benchmarking, and safety assessment of autonomous navigation and intelligent maritime traffic management systems. Code is available at https://anonymous.4open.science/r/traj-gen-anonymous-review.
DASH: Dialogue-Aware Similarity and Handshake Recognition for Topic Segmentation in Public-Channel Conversations
Dec 17, 2025Dialogue Topic Segmentation (DTS) is crucial for understanding task-oriented public-channel communications, such as maritime VHF dialogues, which feature informal speech and implicit transitions. To address the limitations of traditional methods, we propose DASH-DTS, a novel LLM-based framework. Its core contributions are: (1) topic shift detection via dialogue handshake recognition; (2) contextual enhancement through similarity-guided example selection; and (3) the generation of selective positive and negative samples to improve model discrimination and robustness. Additionally, we release VHF-Dial, the first public dataset of real-world maritime VHF communications, to advance research in this domain. DASH-DTS provides interpretable reasoning and confidence scores for each segment. Experimental results demonstrate that our framework achieves several sota segmentation trusted accuracy on both VHF-Dial and standard benchmarks, establishing a strong foundation for stable monitoring and decision support in operational dialogues.
MSD-LLM: Predicting Ship Detention in Port State Control Inspections with Large Language Model
May 26, 2025Maritime transportation is the backbone of global trade, making ship inspection essential for ensuring maritime safety and environmental protection. Port State Control (PSC), conducted by national ports, enforces compliance with safety regulations, with ship detention being the most severe consequence, impacting both ship schedules and company reputations. Traditional machine learning methods for ship detention prediction are limited by the capacity of representation learning and thus suffer from low accuracy. Meanwhile, autoencoder-based deep learning approaches face challenges due to the severe data imbalance in learning historical PSC detention records. To address these limitations, we propose Maritime Ship Detention with Large Language Models (MSD-LLM), integrating a dual robust subspace recovery (DSR) layer-based autoencoder with a progressive learning pipeline to handle imbalanced data and extract meaningful PSC representations. Then, a large language model groups and ranks features to identify likely detention cases, enabling dynamic thresholding for flexible detention predictions. Extensive evaluations on 31,707 PSC inspection records from the Asia-Pacific region show that MSD-LLM outperforms state-of-the-art methods more than 12\% on Area Under the Curve (AUC) for Singapore ports. Additionally, it demonstrates robustness to real-world challenges, making it adaptable to diverse maritime risk assessment scenarios.
VTS-LLM: Domain-Adaptive LLM Agent for Enhancing Awareness in Vessel Traffic Services through Natural Language
May 02, 2025



Vessel Traffic Services (VTS) are essential for maritime safety and regulatory compliance through real-time traffic management. However, with increasing traffic complexity and the prevalence of heterogeneous, multimodal data, existing VTS systems face limitations in spatiotemporal reasoning and intuitive human interaction. In this work, we propose VTS-LLM Agent, the first domain-adaptive large LLM agent tailored for interactive decision support in VTS operations. We formalize risk-prone vessel identification as a knowledge-augmented Text-to-SQL task, combining structured vessel databases with external maritime knowledge. To support this, we construct a curated benchmark dataset consisting of a custom schema, domain-specific corpus, and a query-SQL test set in multiple linguistic styles. Our framework incorporates NER-based relational reasoning, agent-based domain knowledge injection, semantic algebra intermediate representation, and query rethink mechanisms to enhance domain grounding and context-aware understanding. Experimental results show that VTS-LLM outperforms both general-purpose and SQL-focused baselines under command-style, operational-style, and formal natural language queries, respectively. Moreover, our analysis provides the first empirical evidence that linguistic style variation introduces systematic performance challenges in Text-to-SQL modeling. This work lays the foundation for natural language interfaces in vessel traffic services and opens new opportunities for proactive, LLM-driven maritime real-time traffic management.
Lightweight Multimodal Artificial Intelligence Framework for Maritime Multi-Scene Recognition
Mar 10, 2025Maritime Multi-Scene Recognition is crucial for enhancing the capabilities of intelligent marine robotics, particularly in applications such as marine conservation, environmental monitoring, and disaster response. However, this task presents significant challenges due to environmental interference, where marine conditions degrade image quality, and the complexity of maritime scenes, which requires deeper reasoning for accurate recognition. Pure vision models alone are insufficient to address these issues. To overcome these limitations, we propose a novel multimodal Artificial Intelligence (AI) framework that integrates image data, textual descriptions and classification vectors generated by a Multimodal Large Language Model (MLLM), to provide richer semantic understanding and improve recognition accuracy. Our framework employs an efficient multimodal fusion mechanism to further enhance model robustness and adaptability in complex maritime environments. Experimental results show that our model achieves 98$\%$ accuracy, surpassing previous SOTA models by 3.5$\%$. To optimize deployment on resource-constrained platforms, we adopt activation-aware weight quantization (AWQ) as a lightweight technique, reducing the model size to 68.75MB with only a 0.5$\%$ accuracy drop while significantly lowering computational overhead. This work provides a high-performance solution for real-time maritime scene recognition, enabling Autonomous Surface Vehicles (ASVs) to support environmental monitoring and disaster response in resource-limited settings.
Alpha and Prejudice: Improving $α$-sized Worst-case Fairness via Intrinsic Reweighting
Nov 05, 2024Worst-case fairness with off-the-shelf demographics achieves group parity by maximizing the model utility of the worst-off group. Nevertheless, demographic information is often unavailable in practical scenarios, which impedes the use of such a direct max-min formulation. Recent advances have reframed this learning problem by introducing the lower bound of minimal partition ratio, denoted as $\alpha$, as side information, referred to as ``$\alpha$-sized worst-case fairness'' in this paper. We first justify the practical significance of this setting by presenting noteworthy evidence from the data privacy perspective, which has been overlooked by existing research. Without imposing specific requirements on loss functions, we propose reweighting the training samples based on their intrinsic importance to fairness. Given the global nature of the worst-case formulation, we further develop a stochastic learning scheme to simplify the training process without compromising model performance. Additionally, we address the issue of outliers and provide a robust variant to handle potential outliers during model training. Our theoretical analysis and experimental observations reveal the connections between the proposed approaches and existing ``fairness-through-reweighting'' studies, with extensive experimental results on fairness benchmarks demonstrating the superiority of our methods.
Prediction of Vessel Arrival Time to Pilotage Area Using Multi-Data Fusion and Deep Learning
Mar 15, 2024This paper investigates the prediction of vessels' arrival time to the pilotage area using multi-data fusion and deep learning approaches. Firstly, the vessel arrival contour is extracted based on Multivariate Kernel Density Estimation (MKDE) and clustering. Secondly, multiple data sources, including Automatic Identification System (AIS), pilotage booking information, and meteorological data, are fused before latent feature extraction. Thirdly, a Temporal Convolutional Network (TCN) framework that incorporates a residual mechanism is constructed to learn the hidden arrival patterns of the vessels. Extensive tests on two real-world data sets from Singapore have been conducted and the following promising results have been obtained: 1) fusion of pilotage booking information and meteorological data improves the prediction accuracy, with pilotage booking information having a more significant impact; 2) using discrete embedding for the meteorological data performs better than using continuous embedding; 3) the TCN outperforms the state-of-the-art baseline methods in regression tasks, exhibiting Mean Absolute Error (MAE) ranging from 4.58 min to 4.86 min; and 4) approximately 89.41% to 90.61% of the absolute prediction residuals fall within a time frame of 10 min.
Constructing Trajectory and Predicting Estimated Time of Arrival for Long Distance Travelling Vessels: A Probability Density-based Scanning Approach
May 13, 2022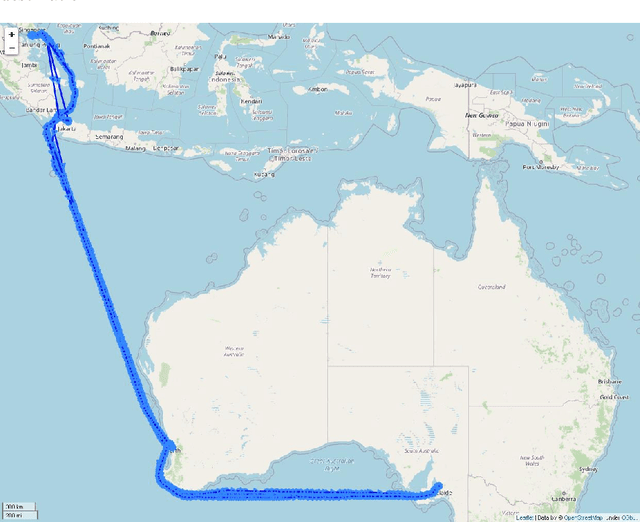
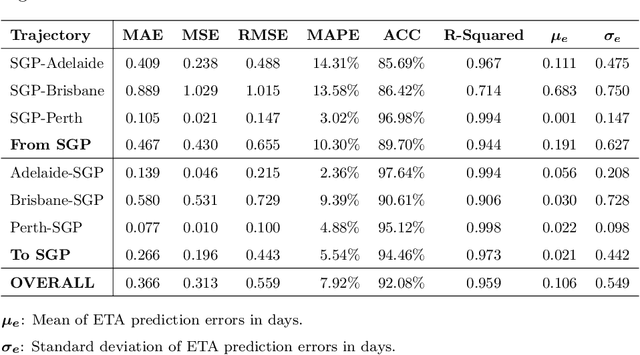
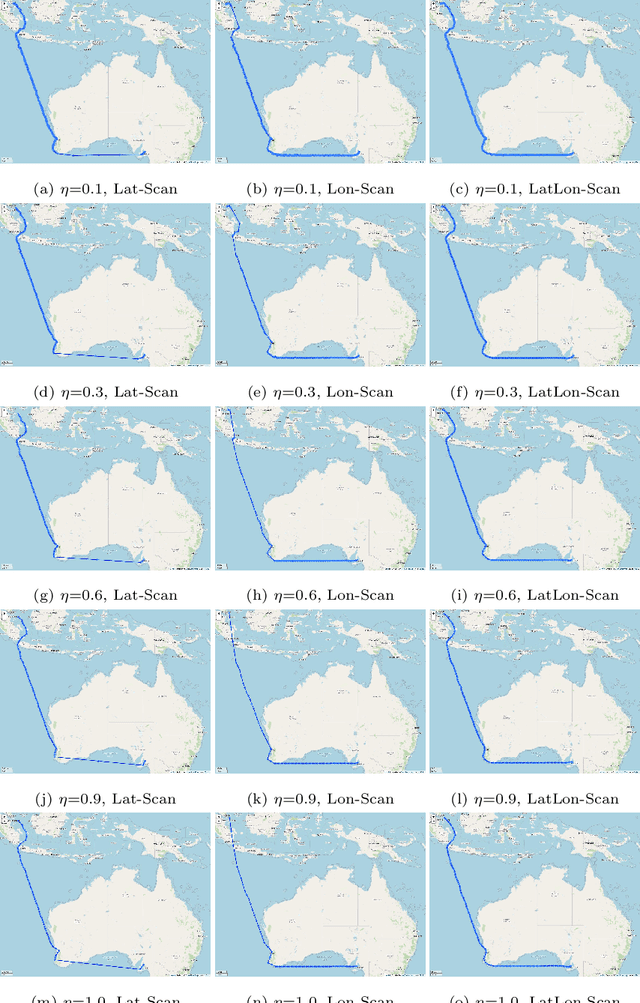
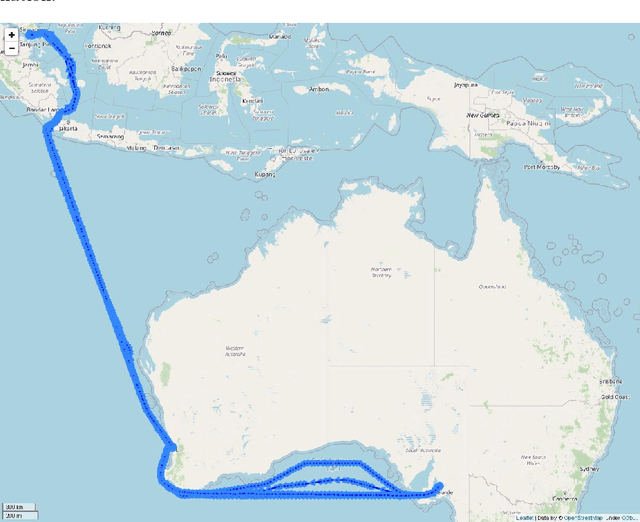
In this study, a probability density-based approach for constructing trajectories is proposed and validated through an typical use-case application: Estimated Time of Arrival (ETA) prediction given origin-destination pairs. The ETA prediction is based on physics and mathematical laws given by the extracted information of probability density-based trajectories constructed. The overall ETA prediction errors are about 0.106 days (i.e. 2.544 hours) on average with 0.549 days (i.e. 13.176 hours) standard deviation, and the proposed approach has an accuracy of 92.08% with 0.959 R-Squared value for overall trajectories between Singapore and Australia ports selected.