 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeel the Difference? A Comparative Analysis of Emotional Arcs in Real and LLM-Generated CBT Sessions
Aug 28, 2025Synthetic therapy dialogues generated by large language models (LLMs) are increasingly used in mental health NLP to simulate counseling scenarios, train models, and supplement limited real-world data. However, it remains unclear whether these synthetic conversations capture the nuanced emotional dynamics of real therapy. In this work, we conduct the first comparative analysis of emotional arcs between real and LLM-generated Cognitive Behavioral Therapy dialogues. We adapt the Utterance Emotion Dynamics framework to analyze fine-grained affective trajectories across valence, arousal, and dominance dimensions. Our analysis spans both full dialogues and individual speaker roles (counselor and client), using real sessions transcribed from public videos and synthetic dialogues from the CACTUS dataset. We find that while synthetic dialogues are fluent and structurally coherent, they diverge from real conversations in key emotional properties: real sessions exhibit greater emotional variability,more emotion-laden language, and more authentic patterns of reactivity and regulation. Moreover, emotional arc similarity between real and synthetic speakers is low, especially for clients. These findings underscore the limitations of current LLM-generated therapy data and highlight the importance of emotional fidelity in mental health applications. We introduce RealCBT, a curated dataset of real CBT sessions, to support future research in this space.
ECCoT: A Framework for Enhancing Effective Cognition via Chain of Thought in Large Language Model
Jun 24, 2025In the era of large-scale artificial intelligence, Large Language Models (LLMs) have made significant strides in natural language processing. However, they often lack transparency and generate unreliable outputs, raising concerns about their interpretability. To address this, the Chain of Thought (CoT) prompting method structures reasoning into step-by-step deductions. Yet, not all reasoning chains are valid, and errors can lead to unreliable conclusions. We propose ECCoT, an End-to-End Cognitive Chain of Thought Validation Framework, to evaluate and refine reasoning chains in LLMs. ECCoT integrates the Markov Random Field-Embedded Topic Model (MRF-ETM) for topic-aware CoT generation and Causal Sentence-BERT (CSBert) for causal reasoning alignment. By filtering ineffective chains using structured ordering statistics, ECCoT improves interpretability, reduces biases, and enhances the trustworthiness of LLM-based decision-making. Key contributions include the introduction of ECCoT, MRF-ETM for topic-driven CoT generation, and CSBert for causal reasoning enhancement. Code is released at: https://github.com/erwinmsmith/ECCoT.git.
Improve Decoding Factuality by Token-wise Cross Layer Entropy of Large Language Models
Feb 05, 2025



Despite their impressive capacities, Large language models (LLMs) often struggle with the hallucination issue of generating inaccurate or fabricated content even when they possess correct knowledge. In this paper, we extend the exploration of the correlation between hidden-state prediction changes and output factuality into a deeper, token-wise level. Based on the insights , we propose cross-layer Entropy eNhanced Decoding (END), a decoding method that mitigates hallucinations without requiring extra training. END leverages inner probability changes across layers to individually quantify the factual knowledge required for each candidate token, and adjusts the final predicting distribution to prioritize tokens with higher factuality. Experiments on both hallucination and QA benchmarks demonstrate that END significantly enhances the truthfulness and informativeness of generated content while maintaining robust QA accuracy. Moreover, our work provides a deeper perspective on understanding the correlations between inherent knowledge and output factuality.
Children's Acquisition of Tail-recursion Sequences: A Review of Locative Recursion and Possessive Recursion as Examples
Dec 28, 2024
Recursion is the nature of human natural language. Since Chomsky proposed generative grammar, many scholars have studied recursion either theoretically or empirically. However, by observing children's acquisition of tail recursion sequences, we can verify the nativism of language supported by universal grammar and reveal the cognitive mechanism of human brain. To date, our understanding of children's acquisition path of recursion and influencing factors still remain controversial. This systematic review summarizes the research of tail recursive sequence by taking possessive recursion and locative recursion as examples, focusing on the experimental methods, acquisition paths, and influencing factors of tail recursive sequence. The current behavioural experiments reveal that, the debate about children's performance revolves around: 1) Gradual acquisition or synchronous acquisition. 2) symmetry or asymmetry between the acquisition of locative recursion sequences and possessive recursion sequences. We presume that children can acquire recursion quickly in a short period of time thanks to the language acquisition device, though there are also scholars who believe that a third factor also plays a role.
Acquisition of Recursive Possessives and Recursive Locatives in Mandarin
Dec 21, 2024As recursion has been underlying any linguistic work for the last 60 years, the acquisition of recursive structures by children during language learning has become a focal point of inquiry. This study delves into the developmental trajectory of Mandarin-speaking children's acquisition of recursive possessives and locatives, assessing the impact of structural diversity on language acquisition. The research contrasts the comprehension of two-level recursive structures among children aged 3 to 7 years, employing answering question while seeing a picture task to elicit responses. The findings indicate that children do not attain adult-like proficiency in two-level recursion until the age of 6, and there exists a notable asymmetry in the acquisition of recursive possessives versus locatives. These results underscore the primacy of structural complexity and cognitive factors in the acquisition process, enhancing our comprehension of the cognitive foundations of language development and the pivotal role of recursion in child language acquisition.
AdvLogo: Adversarial Patch Attack against Object Detectors based on Diffusion Models
Sep 11, 2024



With the rapid development of deep learning, object detectors have demonstrated impressive performance; however, vulnerabilities still exist in certain scenarios. Current research exploring the vulnerabilities using adversarial patches often struggles to balance the trade-off between attack effectiveness and visual quality. To address this problem, we propose a novel framework of patch attack from semantic perspective, which we refer to as AdvLogo. Based on the hypothesis that every semantic space contains an adversarial subspace where images can cause detectors to fail in recognizing objects, we leverage the semantic understanding of the diffusion denoising process and drive the process to adversarial subareas by perturbing the latent and unconditional embeddings at the last timestep. To mitigate the distribution shift that exposes a negative impact on image quality, we apply perturbation to the latent in frequency domain with the Fourier Transform. Experimental results demonstrate that AdvLogo achieves strong attack performance while maintaining high visual quality.
The syntax-semantics interface in a child's path: A study of 3- to 11-year-olds' elicited production of Mandarin recursive relative clauses
Jun 06, 2024



There have been apparently conflicting claims over the syntax-semantics relationship in child acquisition. However, few of them have assessed the child's path toward the acquisition of recursive relative clauses (RRCs). The authors of the current paper did experiments to investigate 3- to 11-year-olds' most-structured elicited production of eight Mandarin RRCs in a 4 (syntactic types)*2 (semantic conditions) design. The four syntactic types were RRCs with a subject-gapped RC embedded in an object-gapped RC (SORRCs), RRCs with an object-gapped RC embedded in another object-gapped RC (OORRCs), RRCs with an object-gapped RC embedded in a subject-gapped RC (OSRRCs), and RRCs with a subject-gapped RC embedded in another subject-gapped RC (SSRRCs). Each syntactic type was put in two conditions differing in internal semantics: irreversible internal semantics (IIS) and reversible internal semantics (RIS). For example, "the balloon that [the girl that _ eats the banana] holds _" is SORRCs in the IIS condition; "the monkey that [the dog that _ bites the pig] hits_" is SORRCs in the RIS condition. For each target, the participants were provided with a speech-visual stimulus constructing a condition of irreversible external semantics (IES). The results showed that SSRRCs, OSRRCs and SORRCs in the IIS-IES condition were produced two years earlier than their counterparts in the RIS-IES condition. Thus, a 2-stage development path is proposed: the language acquisition device starts with the interface between (irreversible) syntax and IIS, and ends with the interface between syntax and IES, both abiding by the syntax-semantic interface principle.
Automatic Tissue Traction with Haptics-Enabled Forceps for Minimally Invasive Surgery
Jan 25, 2024A common limitation of autonomous tissue manipulation in robotic minimally invasive surgery (MIS) is the absence of force sensing and control at the tool level. Recently, our team has developed haptics-enabled forceps that can simultaneously measure the grasping and pulling forces during tissue manipulation. Based on this design, here we further present a method to automate tissue traction with controlled grasping and pulling forces. Specifically, the grasping stage relies on a controlled grasping force, while the pulling stage is under the guidance of a controlled pulling force. Notably, during the pulling process, the simultaneous control of both grasping and pulling forces is also enabled for more precise tissue traction, achieved through force decoupling. The force controller is built upon a static model of tissue manipulation, considering the interaction between the haptics-enabled forceps and soft tissue. The efficacy of this force control approach is validated through a series of experiments comparing targeted, estimated, and actual reference forces. To verify the feasibility of the proposed method in surgical applications, various tissue resections are conducted on ex vivo tissues employing a dual-arm robotic setup. Finally, we discuss the benefits of multi-force control in tissue traction, evidenced through comparative analyses of various ex vivo tissue resections. The results affirm the feasibility of implementing automatic tissue traction using micro-sized forceps with multi-force control, suggesting its potential to promote autonomous MIS. A video demonstrating the experiments can be found at https://youtu.be/8fe8o8IFrjE.
Extraction of Vascular Wall in Carotid Ultrasound via a Novel Boundary-Delineation Network
Jul 28, 2022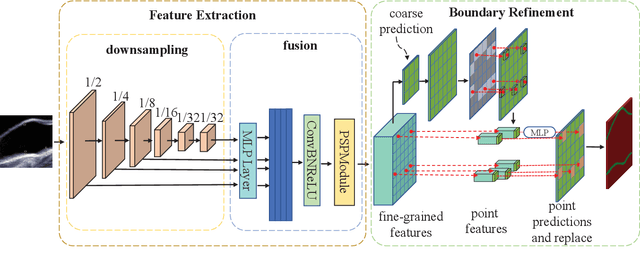
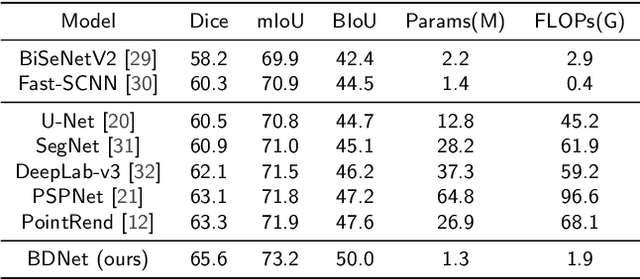
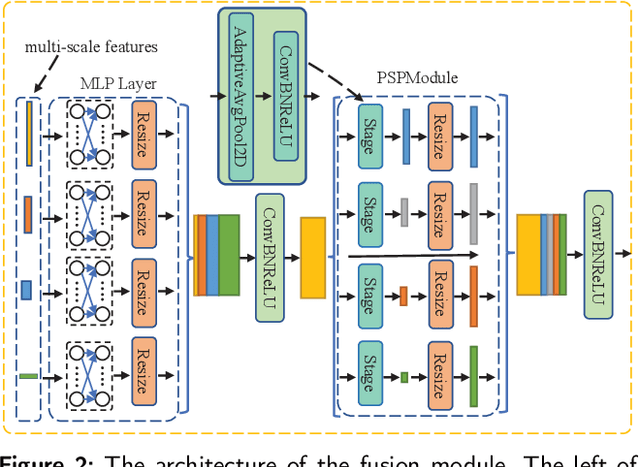
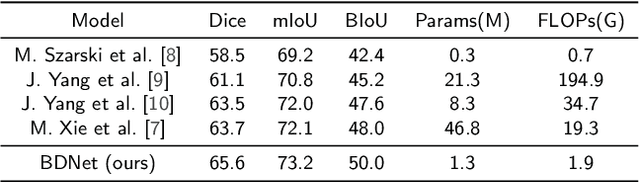
Ultrasound imaging plays an important role in the diagnosis of vascular lesions. Accurate segmentation of the vascular wall is important for the prevention, diagnosis and treatment of vascular diseases. However, existing methods have inaccurate localization of the vascular wall boundary. Segmentation errors occur in discontinuous vascular wall boundaries and dark boundaries. To overcome these problems, we propose a new boundary-delineation network (BDNet). We use the boundary refinement module to re-delineate the boundary of the vascular wall to obtain the correct boundary location. We designed the feature extraction module to extract and fuse multi-scale features and different receptive field features to solve the problem of dark boundaries and discontinuous boundaries. We use a new loss function to optimize the model. The interference of class imbalance on model optimization is prevented to obtain finer and smoother boundaries. Finally, to facilitate clinical applications, we design the model to be lightweight. Experimental results show that our model achieves the best segmentation results and significantly reduces memory consumption compared to existing models for the dataset.
Deep Reinforcement Learning-Assisted Federated Learning for Robust Short-term Utility Demand Forecasting in Electricity Wholesale Markets
Jun 23, 2022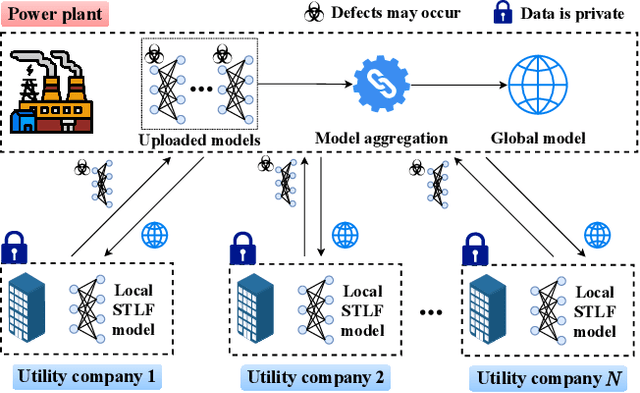

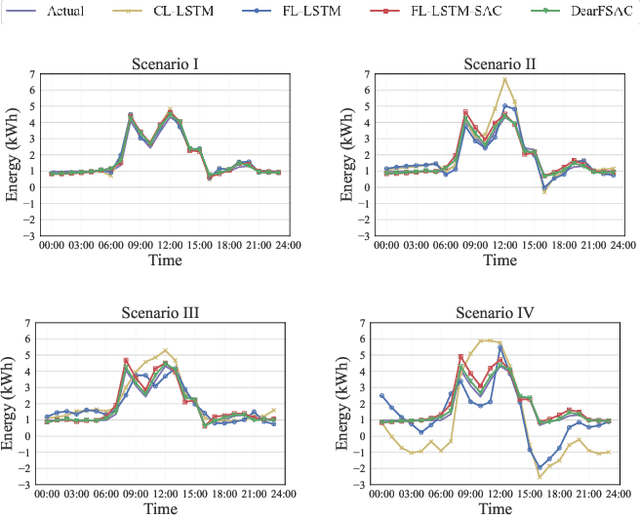
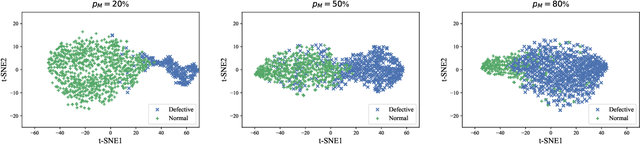
Short-term load forecasting (STLF) plays a significant role in the operation of electricity trading markets. Considering the growing concern of data privacy, federated learning (FL) is increasingly adopted to train STLF models for utility companies (UCs) in recent research. Inspiringly, in wholesale markets, as it is not realistic for power plants (PPs) to access UCs' data directly, FL is definitely a feasible solution of obtaining an accurate STLF model for PPs. However, due to FL's distributed nature and intense competition among UCs, defects increasingly occur and lead to poor performance of the STLF model, indicating that simply adopting FL is not enough. In this paper, we propose a DRL-assisted FL approach, DEfect-AwaRe federated soft actor-critic (DearFSAC), to robustly train an accurate STLF model for PPs to forecast precise short-term utility electricity demand. Firstly. we design a STLF model based on long short-term memory (LSTM) using just historical load data and time data. Furthermore, considering the uncertainty of defects occurrence, a deep reinforcement learning (DRL) algorithm is adopted to assist FL by alleviating model degradation caused by defects. In addition, for faster convergence of FL training, an auto-encoder is designed for both dimension reduction and quality evaluation of uploaded models. In the simulations, we validate our approach on real data of Helsinki's UCs in 2019. The results show that DearFSAC outperforms all the other approaches no matter if defects occur or not.