 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOver-the-Air Federated Learning Over MIMO Channels: A Sparse-Coded Multiplexing Approach
Apr 10, 2023The communication bottleneck of over-the-air federated learning (OA-FL) lies in uploading the gradients of local learning models. In this paper, we study the reduction of the communication overhead in the gradients uploading by using the multiple-input multiple-output (MIMO) technique. We propose a novel sparse-coded multiplexing (SCoM) approach that employs sparse-coding compression and MIMO multiplexing to balance the communication overhead and the learning performance of the FL model. We derive an upper bound on the learning performance loss of the SCoM-based MIMO OA-FL scheme by quantitatively characterizing the gradient aggregation error. Based on the analysis results, we show that the optimal number of multiplexed data streams to minimize the upper bound on the FL learning performance loss is given by the minimum of the numbers of transmit and receive antennas. We then formulate an optimization problem for the design of precoding and post-processing matrices to minimize the gradient aggregation error. To solve this problem, we develop a low-complexity algorithm based on alternating optimization (AO) and alternating direction method of multipliers (ADMM), which effectively mitigates the impact of the gradient aggregation error. Numerical results demonstrate the superb performance of the proposed SCoM approach.
OFDM-Based Massive Connectivity for LEO Satellite Internet of Things
Oct 31, 2022Low earth orbit (LEO) satellite has been considered as a potential supplement for the terrestrial Internet of Things (IoT). In this paper, we consider grant-free non-orthogonal random access (GF-NORA) in orthogonal frequency division multiplexing (OFDM) system to increase access capacity and reduce access latency for LEO satellite-IoT. We focus on the joint device activity detection (DAD) and channel estimation (CE) problem at the satellite access point. The delay and the Doppler effect of the LEO satellite channel are assumed to be partially compensated. We propose an OFDM-symbol repetition technique to better distinguish the residual Doppler frequency shifts, and present a grid-based parametric probability model to characterize channel sparsity in the delay-Doppler-user domain, as well as to characterize the relationship between the channel states and the device activity. Based on that, we develop a robust Bayesian message passing algorithm named modified variance state propagation (MVSP) for joint DAD and CE. Moreover, to tackle the mismatch between the real channel and its on-grid representation, an expectation-maximization (EM) framework is proposed to learn the grid parameters. Simulation results demonstrate that our proposed algorithms significantly outperform the existing approaches in both activity detection probability and channel estimation accuracy.
Message Passing-Based Joint User Activity Detection and Channel Estimation for Temporally-Correlated Massive Access
Oct 24, 2022



This paper studies the temporally-correlated massive access system where a large number of users communicate with the base station sporadically and continue transmitting data in the following frames in high probability when being active. To exploit both the sparsity and the temporal correlations in the user activities, we formulate the joint user activity detection and channel estimation problem in multiple consecutive frames as a dynamic compressed sensing (DCS) problem. Particularly, the problem is proposed to be solved under Bayesian inference to fully utilize the channel statistics and the activity evolution process. The hybrid generalized approximate message passing (HyGAMP) framework is leveraged to design a HyGAMP-DCS algorithm, which can nearly achieve the Bayesian optimality with efficient computations. Specifically, a GAMP part for channel estimation and an MP part for activity likelihood update are included in the proposed algorithm, then the extrinsic information is exchanged between them for performance enhancement. Moveover, we develop the expectation maximization HyGAMP-DCS (EM-HyGAMP-DCS) algorithm to adaptively learn the hyperparameters during the estimation procedure when the system statistics are unavailable. Particularly, the analytical tool of state evolution is provided to find the appropriate hyperparameter initialization that ensures EM-HyGAMP-DCS to achieve satisfied performance and fast convergence. From the simulation results, it is validated that our proposed algorithm can significantly outperform the existing methods.
UAV-Assisted Hierarchical Aggregation for Over-the-Air Federated Learning
Sep 23, 2022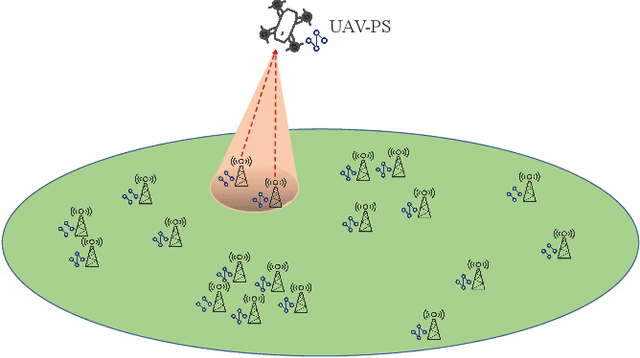
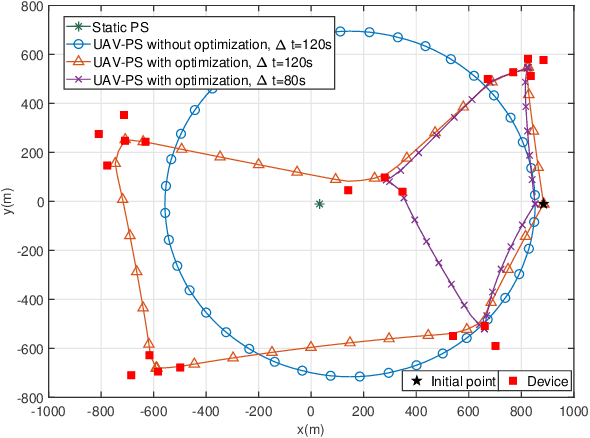
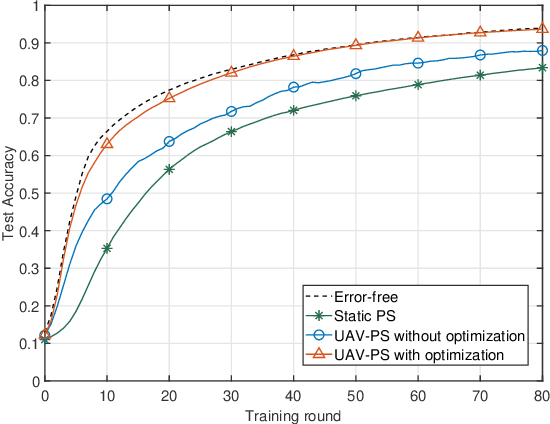
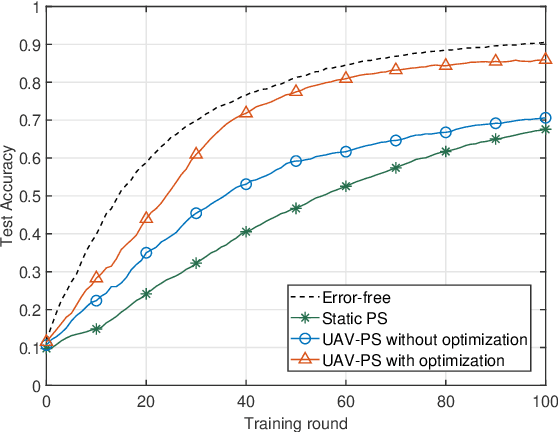
With huge amounts of data explosively increasing in the mobile edge, over-the-air federated learning (OA-FL) emerges as a promising technique to reduce communication costs and privacy leak risks. However, when devices in a relatively large area cooperatively train a machine learning model, the attendant straggler issues will significantly reduce the learning performance. In this paper, we propose an unmanned aerial vehicle (UAV) assisted OA-FL system, where the UAV acts as a parameter server (PS) to aggregate the local gradients hierarchically for global model updating. Under this UAV-assisted hierarchical aggregation scheme, we carry out a gradient-correlation-aware FL performance analysis. We then formulate a mean squared error (MSE) minimization problem to tune the UAV trajectory and the global aggregation coefficients based on the analysis results. An algorithm based on alternating optimization (AO) and successive convex approximation (SCA) is developed to solve the formulated problem. Simulation results demonstrate the great potential of our UAV-assisted hierarchical aggregation scheme.
RIS-Aided Multiuser MIMO-OFDM with Linear Precoding and Iterative Detection: Analysis and Optimization
Aug 30, 2022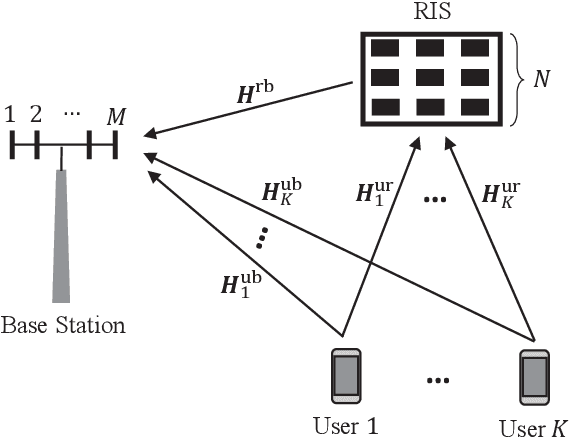
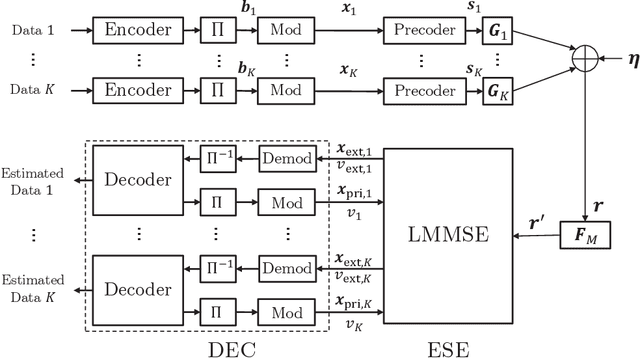
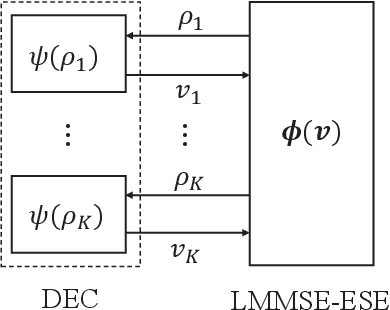
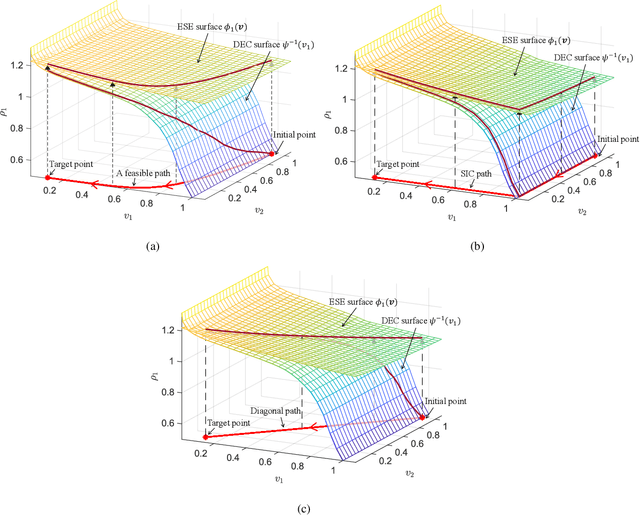
In this paper, we consider a reconfigurable intelligence surface (RIS) aided uplink multiuser multi-input multi-output (MIMO) orthogonal frequency division multiplexing (OFDM) system, where the receiver is assumed to conduct low-complexity iterative detection. We aim to minimize the total transmit power by jointly designing the precoder of the transmitter and the passive beamforming of the RIS. This problem can be tackled from the perspective of information theory. But this information-theoretic approach may involve prohibitively high complexity since the number of rate constraints that specify the capacity region of the uplink multiuser channel is exponential in the number of users. To avoid this difficulty, we formulate the design problem of the iterative receiver under the constraints of a maximal iteration number and target bit error rates of users. To tackle this challenging problem, we propose a groupwise successive interference cancellation (SIC) optimization approach, where the signals of users are decoded and cancelled in a group-by-group manner. We present a heuristic user grouping strategy, and resort to the alternating optimization technique to iteratively solve the precoding and passive beamforming sub-problems. Specifically, for the precoding sub-problem, we employ fractional programming to convert it to a convex problem; for the passive beamforming sub-problem, we adopt successive convex approximation to deal with the unit-modulus constraints of the RIS. We show that the proposed groupwise SIC approach has significant advantages in both performance and computational complexity, as compared with the counterpart approaches.
Joint Localization and Information Transfer for Reconfigurable Intelligent Surface Aided Full-Duplex Systems
Aug 13, 2022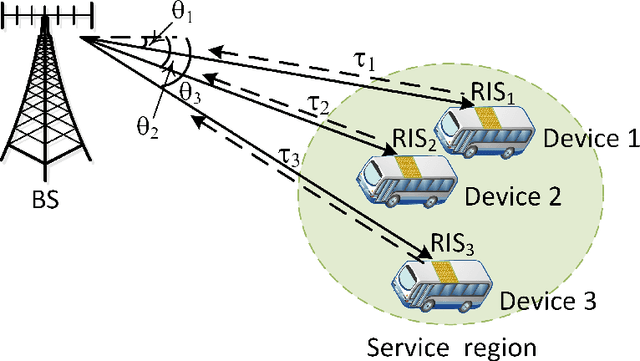
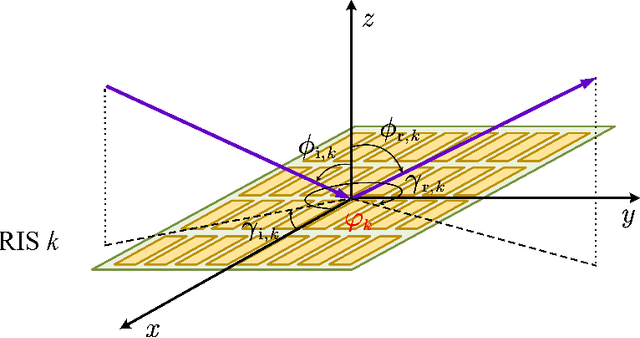
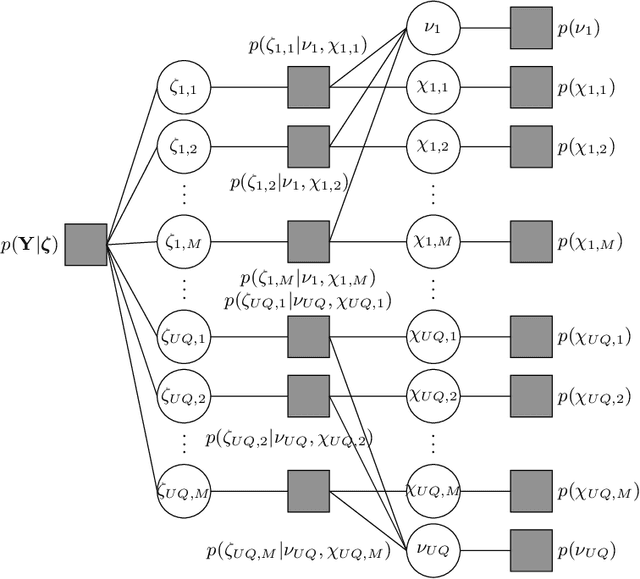
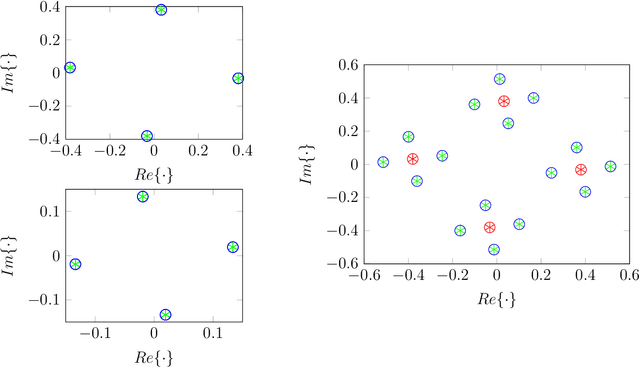
In this work, we investigate a reconfigurable intelligent surface (RIS) aided integrated sensing and communication scenario, where a base station (BS) communicates with multiple devices in a full-duplex mode, and senses the positions of these devices simultaneously. An RIS is assumed to be mounted on each device to enhance the reflected echoes. Meanwhile, the information of each device is passively transferred to the BS via reflection modulation. We aim to tackle the problem of joint localization and information retrieval at the BS. A grid based parametric model is constructed and the joint estimation problem is formulated as a compressive sensing problem. We propose a novel message-passing algorithm to solve the considered problem, and a progressive approximation method to reduce the computational complexity involved in the message passing. Moreover, an expectation-maximization (EM) algorithm is applied for tuning the grid parameters to mitigate the model mismatch problem. Finally, we analyze the efficacy of the proposed algorithm through the Bayesian Cram\'er-Rao bound. Numerical results demonstrate the feasibility of the proposed scheme and the superior performance of the proposed EM-based message-passing algorithm.
Passive Beamforming Design for Reconfigurable Intelligent Surface Enabled Integrated Sensing and Communication
Jun 01, 2022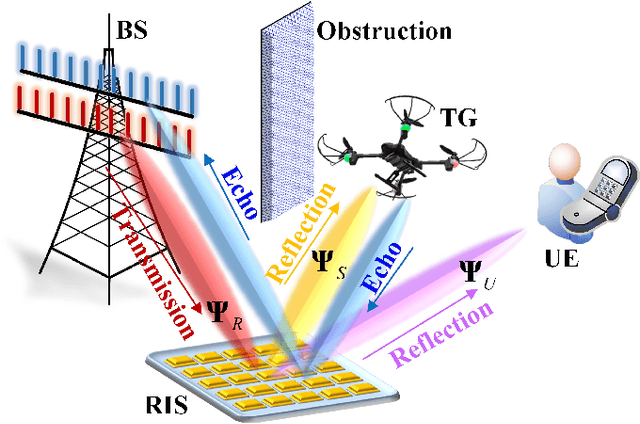
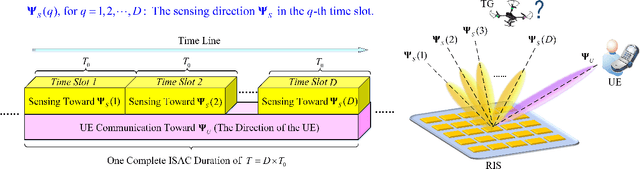
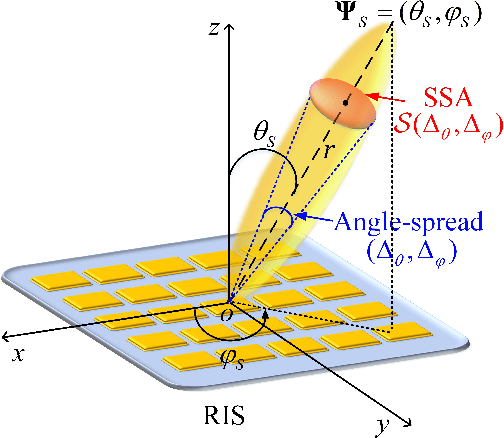
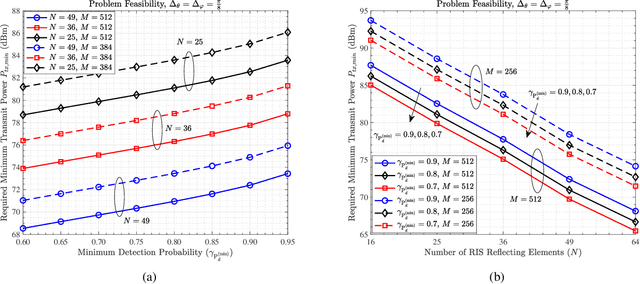
To exploit the potential of the reconfigurable intelligent surface (RIS) in supporting the future integrated sensing and communication (ISAC), this paper proposes a novel passive beamforming strategy for the RIS-enabled ISAC (RIS-ISAC) system in consideration of the target size. To this end, the detection probability for target sensing is derived in closed-form based on the illumination power on an approximated scattering surface area (SSA) of the target, and a new concept of ultimate detection resolution (UDR) is defined for the first time to measure the capability of the target detection. Subsequently, an optimization problem is formulated to maximize the signal-to-noise ratio (SNR) at the user-equipment (UE) under a minimum detection probability constraint. To solve this problem, a novel convexification process is performed to convexify the detection probability constraint with matrix operations and a real-valued first-order Taylor approximation. The semidefinite relaxation (SDR) is then adopted to relax the problem. A successive convex approximation (SCA) based algorithm is finally designed to yield a phase-shift solution, followed by a detailed analysis on the problem feasibility condition as well as the algorithm convergence. Our results reveal the inherent trade-offs between the sensing and the communication performances, and between the UDR and the duration of a sensing time slot. In comparison with two existing approaches, the proposed strategy is validated to be superior when detecting targets with practical sizes.
Confederated Learning: Federated Learning with Decentralized Edge Servers
May 30, 2022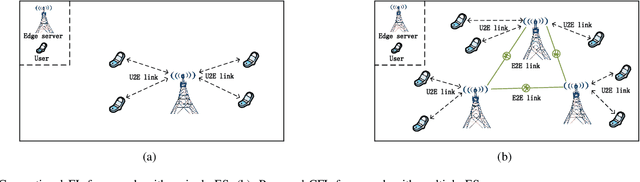
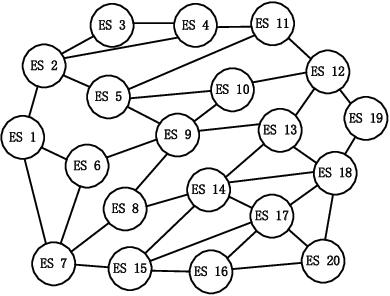
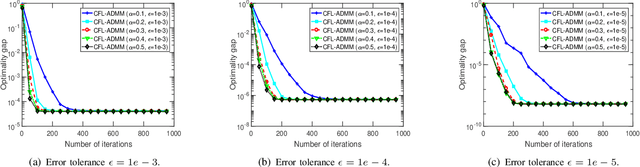
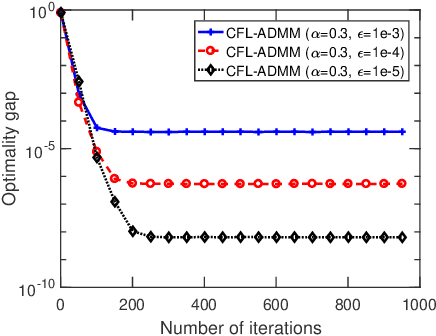
Federated learning (FL) is an emerging machine learning paradigm that allows to accomplish model training without aggregating data at a central server. Most studies on FL consider a centralized framework, in which a single server is endowed with a central authority to coordinate a number of devices to perform model training in an iterative manner. Due to stringent communication and bandwidth constraints, such a centralized framework has limited scalability as the number of devices grows. To address this issue, in this paper, we propose a ConFederated Learning (CFL) framework. The proposed CFL consists of multiple servers, in which each server is connected with an individual set of devices as in the conventional FL framework, and decentralized collaboration is leveraged among servers to make full use of the data dispersed throughout the network. We develop an alternating direction method of multipliers (ADMM) algorithm for CFL. The proposed algorithm employs a random scheduling policy which randomly selects a subset of devices to access their respective servers at each iteration, thus alleviating the need of uploading a huge amount of information from devices to servers. Theoretical analysis is presented to justify the proposed method. Numerical results show that the proposed method can converge to a decent solution significantly faster than gradient-based FL algorithms, thus boasting a substantial advantage in terms of communication efficiency.
Hybrid Offline-Online Design for Reconfigurable Intelligent Surface Aided UAV Communication
May 27, 2022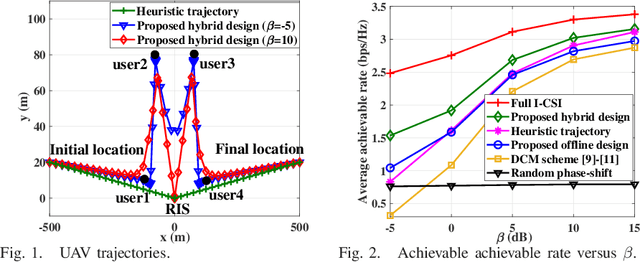
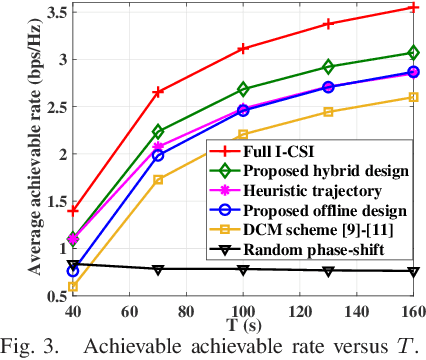
This letter considers the reconfigurable intelligent surface (RIS)-aided unmanned aerial vehicle (UAV) communication systems in urban areas under the general Rician fading channel. A hybrid offline-online design is proposed to improve the system performance by leveraging both the statistical channel state information (S-CSI) and instantaneous channel state information (I-CSI). For the offline phase, we aim to maximize the expected average achievable rate based on the S-CSI by jointly optimizing the RIS's phase-shift and UAV trajectory. The formulated stochastic optimization problem is difficult to solve due to its non-convexity. To tackle this problem, we propose an efficient algorithm by leveraging the stochastic successive convex approximation (SSCA) techniques. For the online phase, the UAV adaptively adjusts the transmit beamforming and user scheduling according to the effective I-CSI. Numerical results verify that the proposed hybrid design performs better than various bechmark schemes, and also demonstrate a favorable trade-off between system performance and CSI overhead.
Over-the-Air Federated Multi-Task Learning via Model Sparsification and Turbo Compressed Sensing
May 08, 2022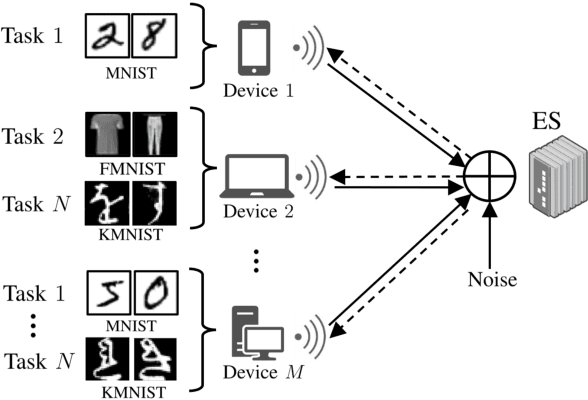
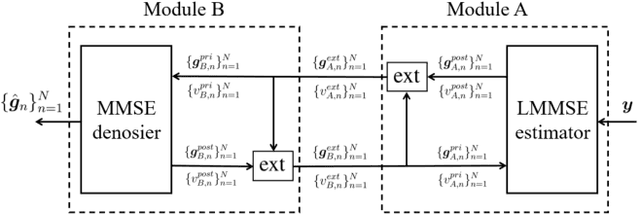
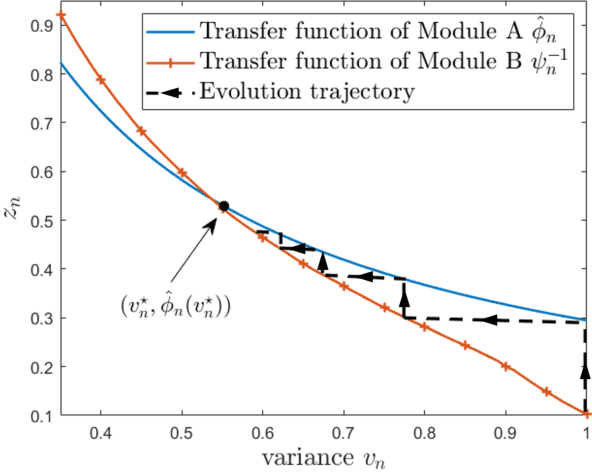
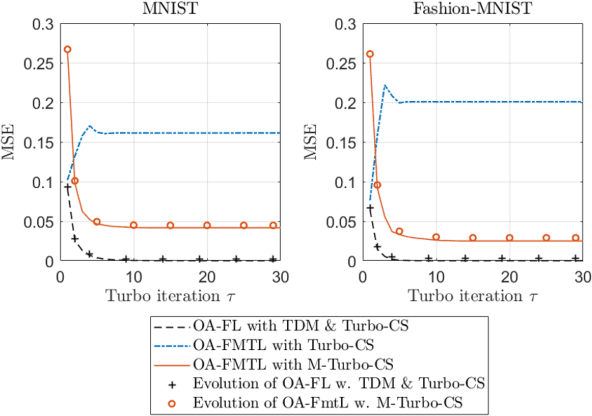
To achieve communication-efficient federated multitask learning (FMTL), we propose an over-the-air FMTL (OAFMTL) framework, where multiple learning tasks deployed on edge devices share a non-orthogonal fading channel under the coordination of an edge server (ES). In OA-FMTL, the local updates of edge devices are sparsified, compressed, and then sent over the uplink channel in a superimposed fashion. The ES employs over-the-air computation in the presence of intertask interference. More specifically, the model aggregations of all the tasks are reconstructed from the channel observations concurrently, based on a modified version of the turbo compressed sensing (Turbo-CS) algorithm (named as M-Turbo-CS). We analyze the performance of the proposed OA-FMTL framework together with the M-Turbo-CS algorithm. Furthermore, based on the analysis, we formulate a communication-learning optimization problem to improve the system performance by adjusting the power allocation among the tasks at the edge devices. Numerical simulations show that our proposed OAFMTL effectively suppresses the inter-task interference, and achieves a learning performance comparable to its counterpart with orthogonal multi-task transmission. It is also shown that the proposed inter-task power allocation optimization algorithm substantially reduces the overall communication overhead by appropriately adjusting the power allocation among the tasks.