 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpaceVLN: A Zero-Shot Vision-and-Language Navigation Agent with Online Spatial Cognitive Memory and Reasoning
Jun 08, 2026Vision-and-Language Navigation in continuous environments requires agents to understand the spatial structure of previously unseen environments in order to follow language instructions. Although foundation models have opened a promising path toward zero-shot navigation without task-specific policy training, many navigators still rely on local visual cues and linear history-based reasoning, overlooking the spatial nature of navigation across explored regions, traversed paths, landmarks, and their spatial relations. In this paper, we propose SpaceVLN, a navigation agent built around Spatial Cognitive Memory and Task-Guided Spatial Reasoning. Specifically, SpaceVLN introduces an efficient stagewise closed-loop framework where planning and execution are organized around verifiable space--landmark stages. During navigation, the agent progressively abstracts explored regions into Spatial Waypoints and dynamically maintains subtask-grounded landmark evidence, forming a hierarchical Spatial Cognitive Memory for progress localization and spatial-relation understanding. Built on this memory, Spatial-CoT integrates task-progress reasoning with spatial perception, analysis, and prediction, enabling Task-Guided Spatial Reasoning for embodied navigation. The unified stage interface enables SpaceVLN to address both Vision-and-Language Navigation and Object-Goal Navigation under a unified zero-shot setting, without task-specific policy training. Across R2R-CE, RxR-CE, GN-Bench, and HM3D-OVON, SpaceVLN achieves state-of-the-art zero-shot performance, and real-robot deployment further validates its applicability. These results highlight Spatial Cognitive Memory and Task-Guided Spatial Reasoning as a practical foundation for stronger embodied navigation agents.
MetaDD: Boosting Dataset Distillation with Neural Network Architecture-Invariant Generalization
Oct 07, 2024



Dataset distillation (DD) entails creating a refined, compact distilled dataset from a large-scale dataset to facilitate efficient training. A significant challenge in DD is the dependency between the distilled dataset and the neural network (NN) architecture used. Training a different NN architecture with a distilled dataset distilled using a specific architecture often results in diminished trainning performance for other architectures. This paper introduces MetaDD, designed to enhance the generalizability of DD across various NN architectures. Specifically, MetaDD partitions distilled data into meta features (i.e., the data's common characteristics that remain consistent across different NN architectures) and heterogeneous features (i.e., the data's unique feature to each NN architecture). Then, MetaDD employs an architecture-invariant loss function for multi-architecture feature alignment, which increases meta features and reduces heterogeneous features in distilled data. As a low-memory consumption component, MetaDD can be seamlessly integrated into any DD methodology. Experimental results demonstrate that MetaDD significantly improves performance across various DD methods. On the Distilled Tiny-Imagenet with Sre2L (50 IPC), MetaDD achieves cross-architecture NN accuracy of up to 30.1\%, surpassing the second-best method (GLaD) by 1.7\%.
Actions at the Edge: Jointly Optimizing the Resources in Multi-access Edge Computing
Apr 18, 2022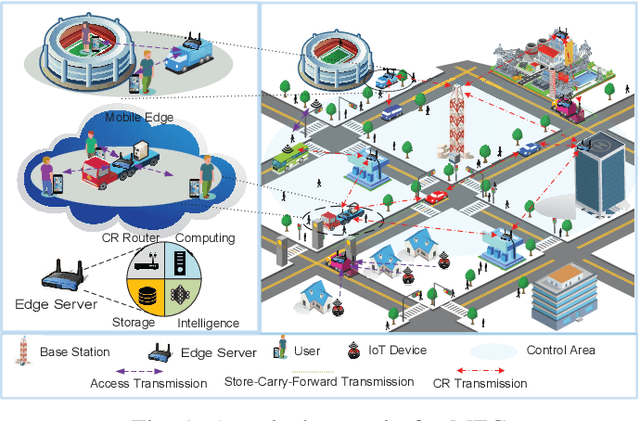
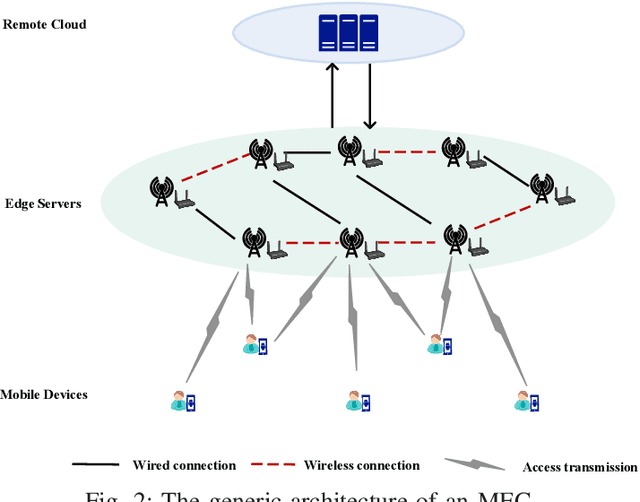
Multi-access edge computing (MEC) is an emerging paradigm that pushes resources for sensing, communications, computing, storage and intelligence (SCCSI) to the premises closer to the end users, i.e., the edge, so that they could leverage the nearby rich resources to improve their quality of experience (QoE). Due to the growing emerging applications targeting at intelligentizing life-sustaining cyber-physical systems, this paradigm has become a hot research topic, particularly when MEC is utilized to provide edge intelligence and real-time processing and control. This article is to elaborate the research issues along this line, including basic concepts and performance metrics, killer applications, architectural design, modeling approaches and solutions, and future research directions. It is hoped that this article provides a quick introduction to this fruitful research area particularly for beginning researchers.