 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning and Aggregating Lane Graphs for Urban Automated Driving
Feb 13, 2023



Lane graph estimation is an essential and highly challenging task in automated driving and HD map learning. Existing methods using either onboard or aerial imagery struggle with complex lane topologies, out-of-distribution scenarios, or significant occlusions in the image space. Moreover, merging overlapping lane graphs to obtain consistent large-scale graphs remains difficult. To overcome these challenges, we propose a novel bottom-up approach to lane graph estimation from aerial imagery that aggregates multiple overlapping graphs into a single consistent graph. Due to its modular design, our method allows us to address two complementary tasks: predicting ego-respective successor lane graphs from arbitrary vehicle positions using a graph neural network and aggregating these predictions into a consistent global lane graph. Extensive experiments on a large-scale lane graph dataset demonstrate that our approach yields highly accurate lane graphs, even in regions with severe occlusions. The presented approach to graph aggregation proves to eliminate inconsistent predictions while increasing the overall graph quality. We make our large-scale urban lane graph dataset and code publicly available at http://urbanlanegraph.cs.uni-freiburg.de.
SkyEye: Self-Supervised Bird's-Eye-View Semantic Mapping Using Monocular Frontal View Images
Feb 08, 2023



Bird's-Eye-View (BEV) semantic maps have become an essential component of automated driving pipelines due to the rich representation they provide for decision-making tasks. However, existing approaches for generating these maps still follow a fully supervised training paradigm and hence rely on large amounts of annotated BEV data. In this work, we address this limitation by proposing the first self-supervised approach for generating a BEV semantic map using a single monocular image from the frontal view (FV). During training, we overcome the need for BEV ground truth annotations by leveraging the more easily available FV semantic annotations of video sequences. Thus, we propose the SkyEye architecture that learns based on two modes of self-supervision, namely, implicit supervision and explicit supervision. Implicit supervision trains the model by enforcing spatial consistency of the scene over time based on FV semantic sequences, while explicit supervision exploits BEV pseudolabels generated from FV semantic annotations and self-supervised depth estimates. Extensive evaluations on the KITTI-360 dataset demonstrate that our self-supervised approach performs on par with the state-of-the-art fully supervised methods and achieves competitive results using only 1% of direct supervision in the BEV compared to fully supervised approaches. Finally, we publicly release both our code and the BEV datasets generated from the KITTI-360 and Waymo datasets.
Visual Language Maps for Robot Navigation
Oct 17, 2022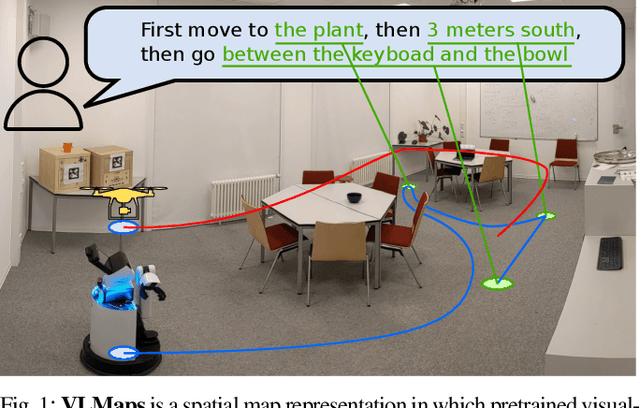
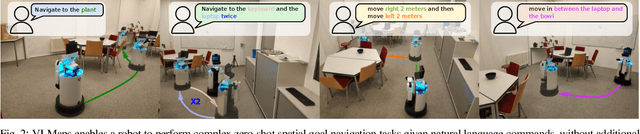
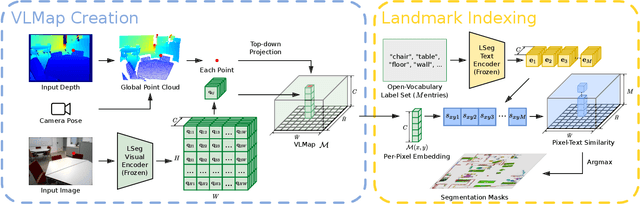
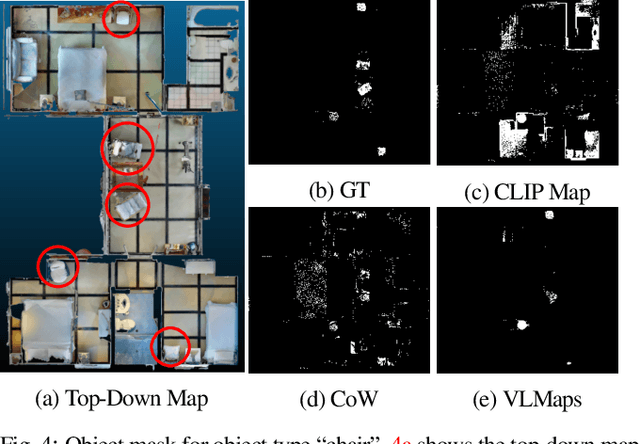
Grounding language to the visual observations of a navigating agent can be performed using off-the-shelf visual-language models pretrained on Internet-scale data (e.g., image captions). While this is useful for matching images to natural language descriptions of object goals, it remains disjoint from the process of mapping the environment, so that it lacks the spatial precision of classic geometric maps. To address this problem, we propose VLMaps, a spatial map representation that directly fuses pretrained visual-language features with a 3D reconstruction of the physical world. VLMaps can be autonomously built from video feed on robots using standard exploration approaches and enables natural language indexing of the map without additional labeled data. Specifically, when combined with large language models (LLMs), VLMaps can be used to (i) translate natural language commands into a sequence of open-vocabulary navigation goals (which, beyond prior work, can be spatial by construction, e.g., "in between the sofa and TV" or "three meters to the right of the chair") directly localized in the map, and (ii) can be shared among multiple robots with different embodiments to generate new obstacle maps on-the-fly (by using a list of obstacle categories). Extensive experiments carried out in simulated and real world environments show that VLMaps enable navigation according to more complex language instructions than existing methods. Videos are available at https://vlmaps.github.io.
Grounding Language with Visual Affordances over Unstructured Data
Oct 10, 2022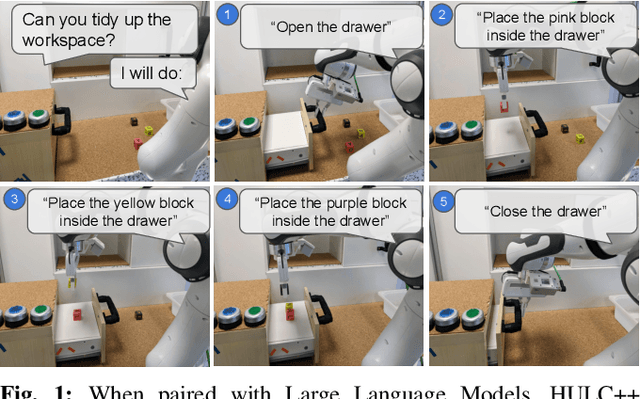
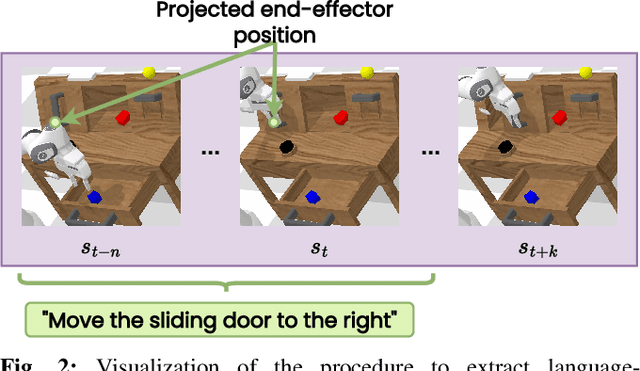
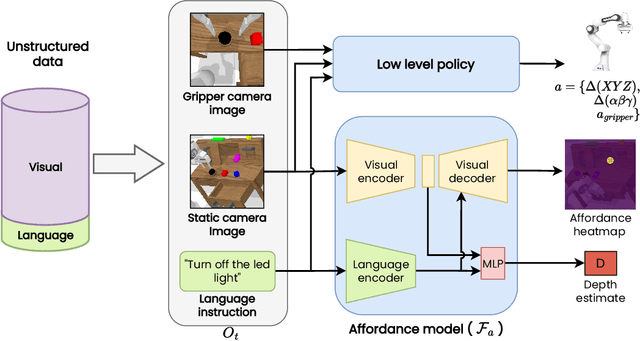
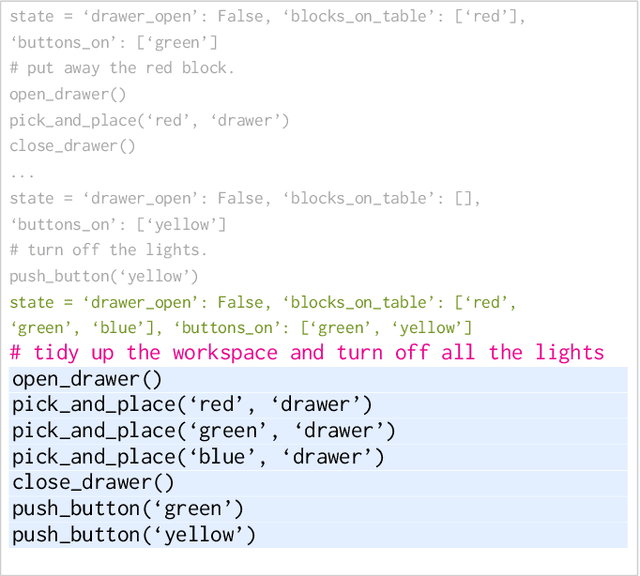
Recent works have shown that Large Language Models (LLMs) can be applied to ground natural language to a wide variety of robot skills. However, in practice, learning multi-task, language-conditioned robotic skills typically requires large-scale data collection and frequent human intervention to reset the environment or help correcting the current policies. In this work, we propose a novel approach to efficiently learn general-purpose language-conditioned robot skills from unstructured, offline and reset-free data in the real world by exploiting a self-supervised visuo-lingual affordance model, which requires annotating as little as 1% of the total data with language. We evaluate our method in extensive experiments both in simulated and real-world robotic tasks, achieving state-of-the-art performance on the challenging CALVIN benchmark and learning over 25 distinct visuomotor manipulation tasks with a single policy in the real world. We find that when paired with LLMs to break down abstract natural language instructions into subgoals via few-shot prompting, our method is capable of completing long-horizon, multi-tier tasks in the real world, while requiring an order of magnitude less data than previous approaches. Code and videos are available at http://hulc2.cs.uni-freiburg.de
Uncertainty-aware LiDAR Panoptic Segmentation
Oct 10, 2022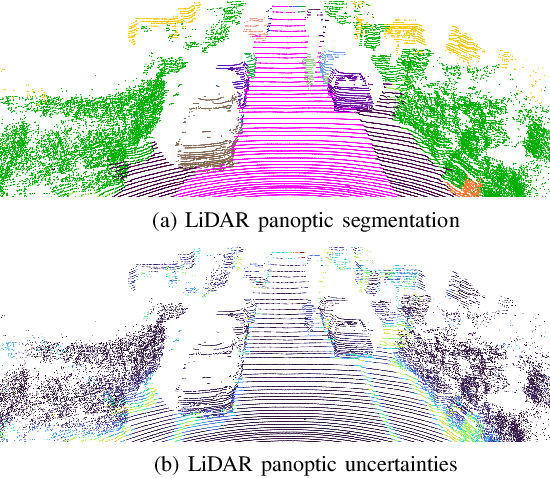
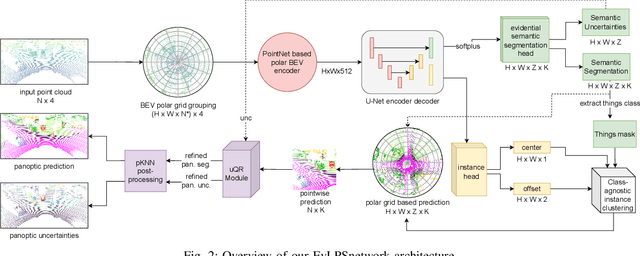
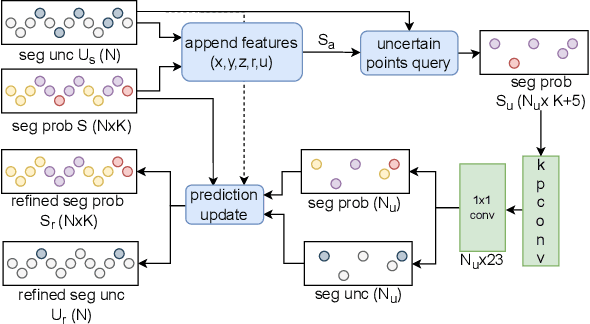
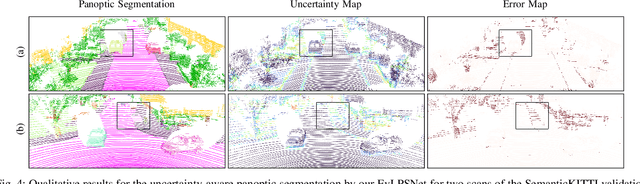
Modern autonomous systems often rely on LiDAR scanners, in particular for autonomous driving scenarios. In this context, reliable scene understanding is indispensable. Current learning-based methods typically try to achieve maximum performance for this task, while neglecting a proper estimation of the associated uncertainties. In this work, we introduce a novel approach for solving the task of uncertainty-aware panoptic segmentation using LiDAR point clouds. Our proposed EvLPSNet network is the first to solve this task efficiently in a sampling-free manner. It aims to predict per-point semantic and instance segmentations, together with per-point uncertainty estimates. Moreover, it incorporates methods for improving the performance by employing the predicted uncertainties. We provide several strong baselines combining state-of-the-art panoptic segmentation networks with sampling-free uncertainty estimation techniques. Extensive evaluations show that we achieve the best performance on uncertainty-aware panoptic segmentation quality and calibration compared to these baselines. We make our code available at: \url{https://github.com/kshitij3112/EvLPSNet}
PADLoC: LiDAR-Based Deep Loop Closure Detection and Registration using Panoptic Attention
Sep 20, 2022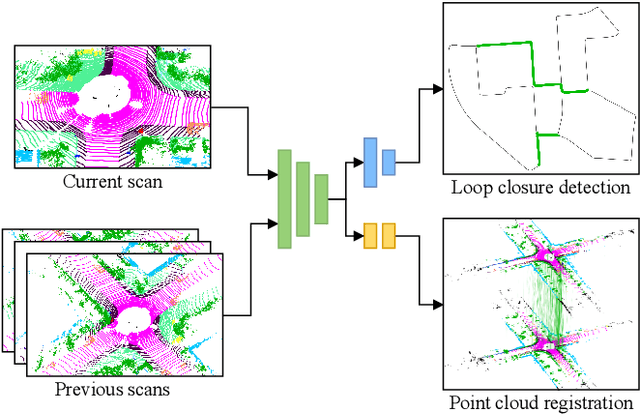
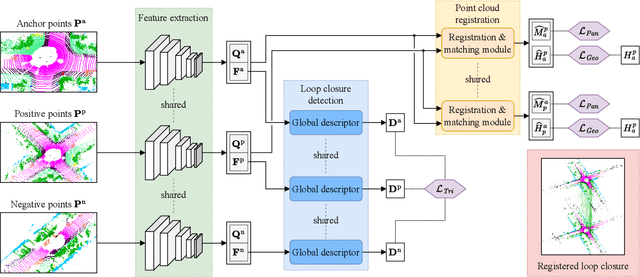
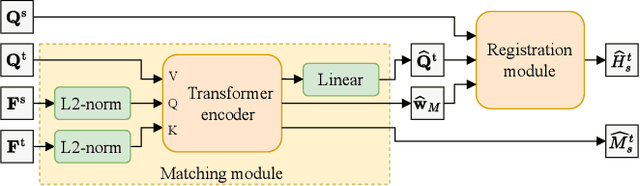
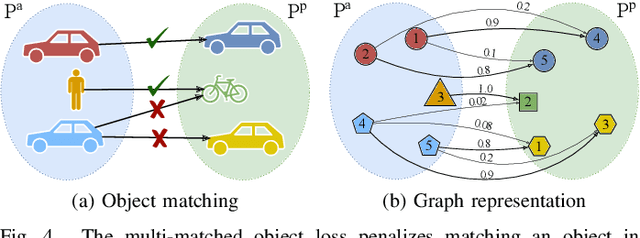
A key component of graph-based SLAM systems is the ability to detect loop closures in a trajectory to reduce the drift accumulated over time from the odometry. Most LiDAR-based methods achieve this goal by using only the geometric information, disregarding the semantics of the scene. In this work, we introduce PADLoC, a LiDAR-based loop closure detection and registration architecture comprising a shared 3D convolutional feature extraction backbone, a global descriptor head for loop closure detection, and a novel transformer-based head for point cloud matching and registration. We present multiple methods for estimating the point-wise matching confidence based on diversity indices. Additionally, to improve forward-backward consistency, we propose the use of two shared matching and registration heads with their source and target inputs swapped by exploiting that the estimated relative transformations must be inverse of each other. Furthermore, we leverage panoptic information during training in the form of a novel loss function that reframes the matching problem as a classification task in the case of the semantic labels and as a graph connectivity assignment for the instance labels. We perform extensive evaluations of PADLoC on multiple real-world datasets demonstrating that it achieves state-of-the-art performance. The code of our work is publicly available at http://padloc.cs.uni-freiburg.de.
T3VIP: Transformation-based 3D Video Prediction
Sep 19, 2022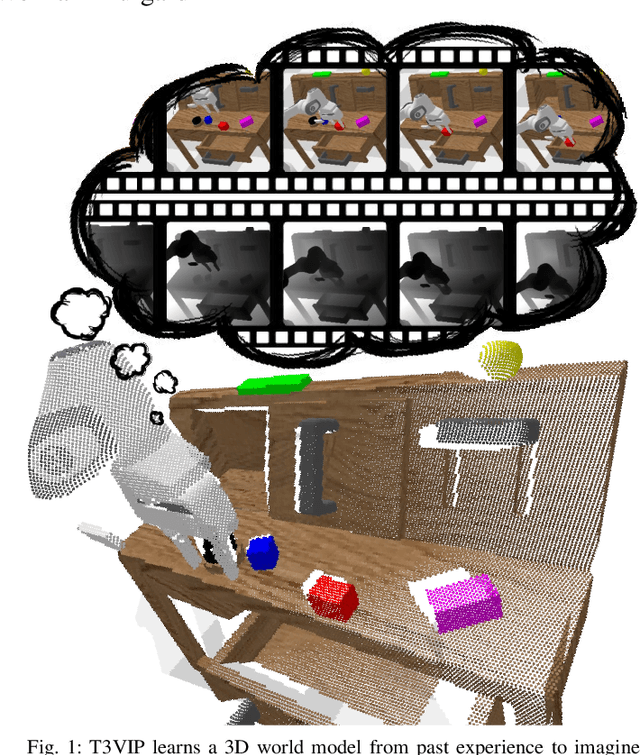
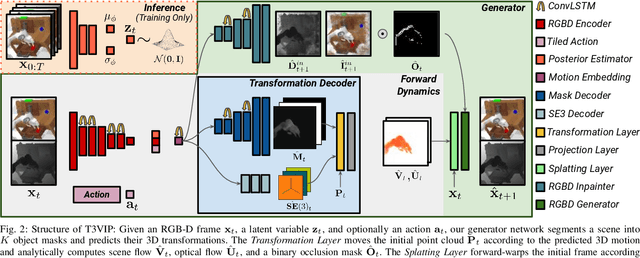
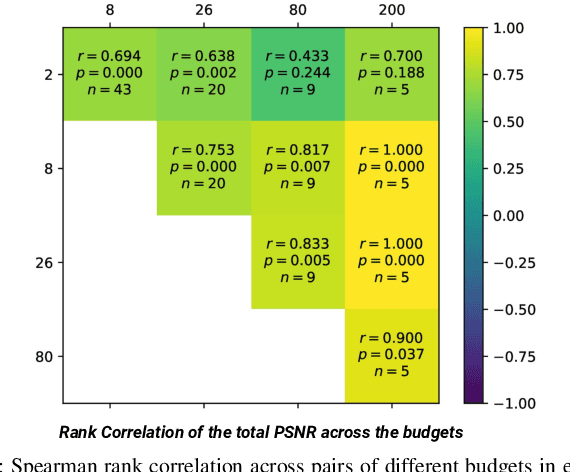
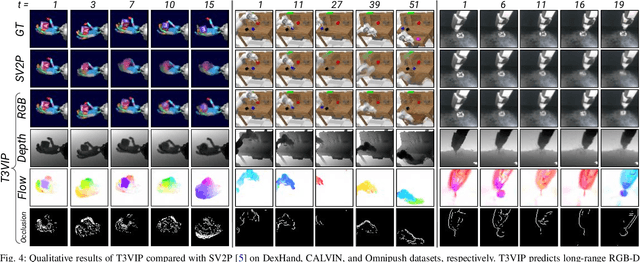
For autonomous skill acquisition, robots have to learn about the physical rules governing the 3D world dynamics from their own past experience to predict and reason about plausible future outcomes. To this end, we propose a transformation-based 3D video prediction (T3VIP) approach that explicitly models the 3D motion by decomposing a scene into its object parts and predicting their corresponding rigid transformations. Our model is fully unsupervised, captures the stochastic nature of the real world, and the observational cues in image and point cloud domains constitute its learning signals. To fully leverage all the 2D and 3D observational signals, we equip our model with automatic hyperparameter optimization (HPO) to interpret the best way of learning from them. To the best of our knowledge, our model is the first generative model that provides an RGB-D video prediction of the future for a static camera. Our extensive evaluation with simulated and real-world datasets demonstrates that our formulation leads to interpretable 3D models that predict future depth videos while achieving on-par performance with 2D models on RGB video prediction. Moreover, we demonstrate that our model outperforms 2D baselines on visuomotor control. Videos, code, dataset, and pre-trained models are available at http://t3vip.cs.uni-freiburg.de.
Latent Plans for Task-Agnostic Offline Reinforcement Learning
Sep 19, 2022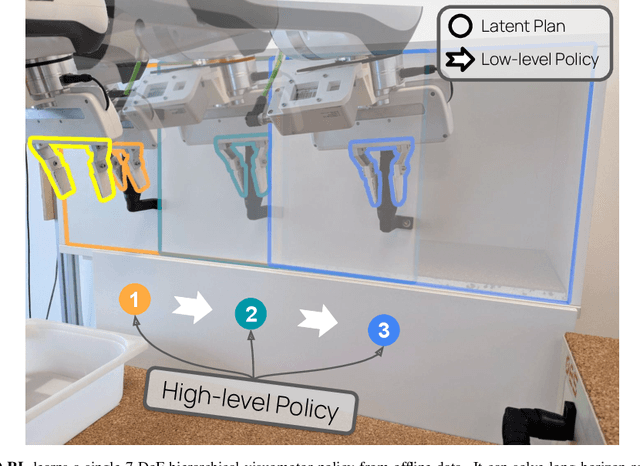
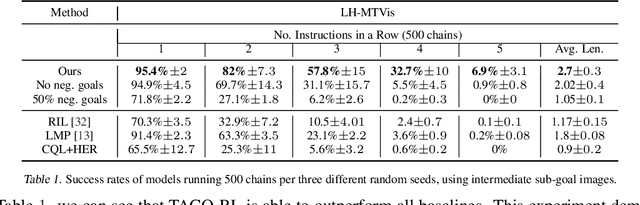
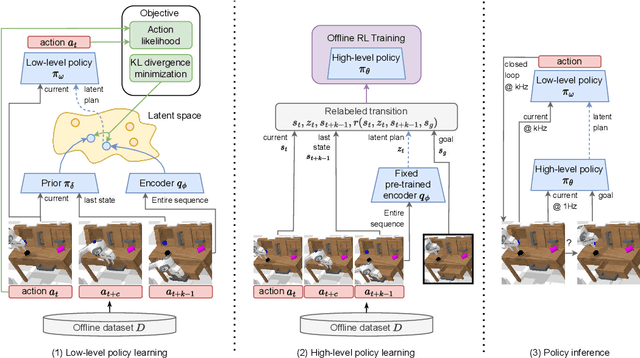
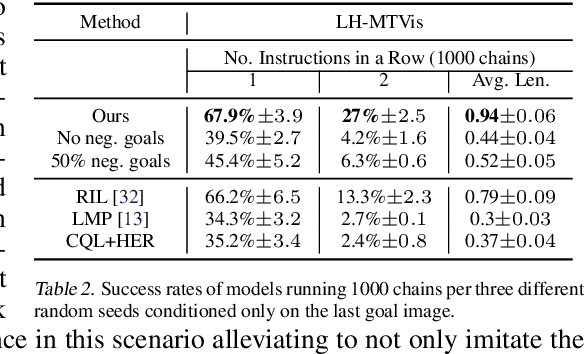
Everyday tasks of long-horizon and comprising a sequence of multiple implicit subtasks still impose a major challenge in offline robot control. While a number of prior methods aimed to address this setting with variants of imitation and offline reinforcement learning, the learned behavior is typically narrow and often struggles to reach configurable long-horizon goals. As both paradigms have complementary strengths and weaknesses, we propose a novel hierarchical approach that combines the strengths of both methods to learn task-agnostic long-horizon policies from high-dimensional camera observations. Concretely, we combine a low-level policy that learns latent skills via imitation learning and a high-level policy learned from offline reinforcement learning for skill-chaining the latent behavior priors. Experiments in various simulated and real robot control tasks show that our formulation enables producing previously unseen combinations of skills to reach temporally extended goals by "stitching" together latent skills through goal chaining with an order-of-magnitude improvement in performance upon state-of-the-art baselines. We even learn one multi-task visuomotor policy for 25 distinct manipulation tasks in the real world which outperforms both imitation learning and offline reinforcement learning techniques.
TrackletMapper: Ground Surface Segmentation and Mapping from Traffic Participant Trajectories
Sep 16, 2022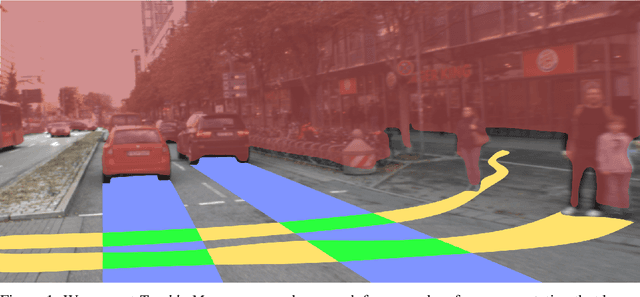
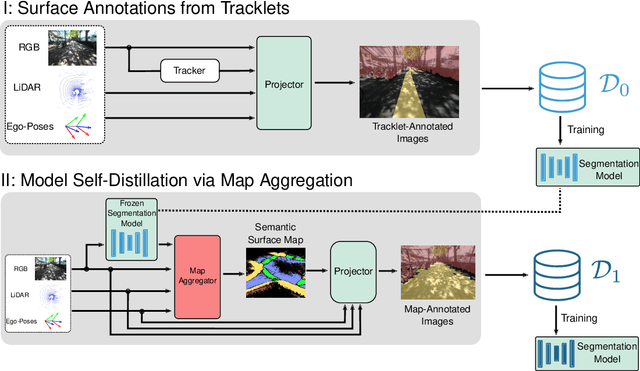
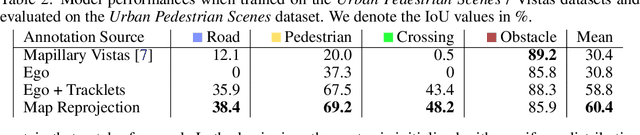

Robustly classifying ground infrastructure such as roads and street crossings is an essential task for mobile robots operating alongside pedestrians. While many semantic segmentation datasets are available for autonomous vehicles, models trained on such datasets exhibit a large domain gap when deployed on robots operating in pedestrian spaces. Manually annotating images recorded from pedestrian viewpoints is both expensive and time-consuming. To overcome this challenge, we propose TrackletMapper, a framework for annotating ground surface types such as sidewalks, roads, and street crossings from object tracklets without requiring human-annotated data. To this end, we project the robot ego-trajectory and the paths of other traffic participants into the ego-view camera images, creating sparse semantic annotations for multiple types of ground surfaces from which a ground segmentation model can be trained. We further show that the model can be self-distilled for additional performance benefits by aggregating a ground surface map and projecting it into the camera images, creating a denser set of training annotations compared to the sparse tracklet annotations. We qualitatively and quantitatively attest our findings on a novel large-scale dataset for mobile robots operating in pedestrian areas. Code and dataset will be made available at http://trackletmapper.cs.uni-freiburg.de.
USegScene: Unsupervised Learning of Depth, Optical Flow and Ego-Motion with Semantic Guidance and Coupled Networks
Jul 15, 2022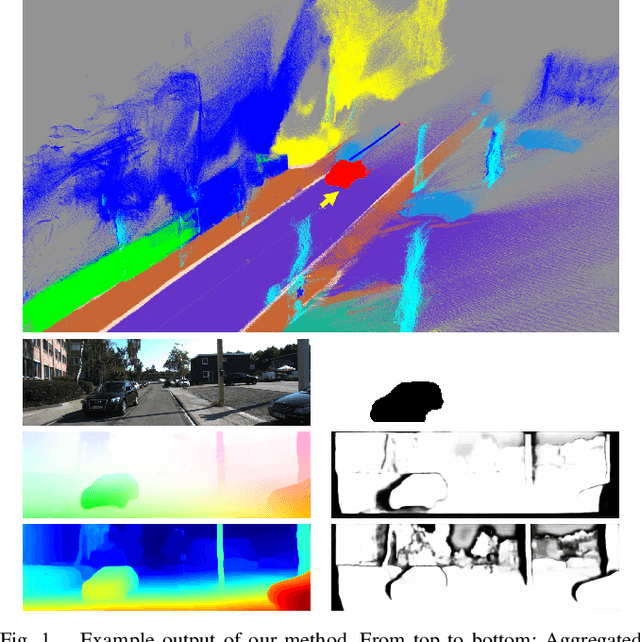
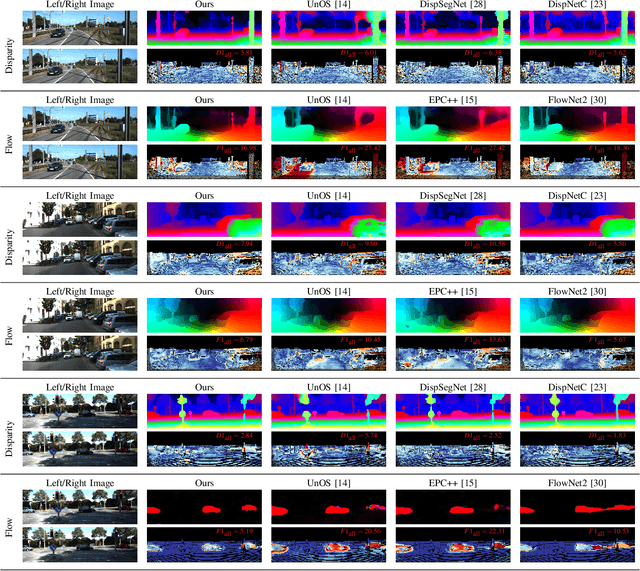
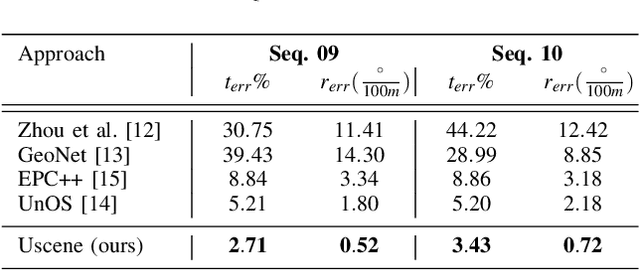
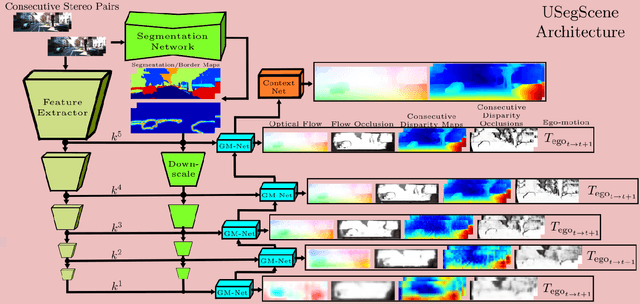
In this paper we propose USegScene, a framework for semantically guided unsupervised learning of depth, optical flow and ego-motion estimation for stereo camera images using convolutional neural networks. Our framework leverages semantic information for improved regularization of depth and optical flow maps, multimodal fusion and occlusion filling considering dynamic rigid object motions as independent SE(3) transformations. Furthermore, complementary to pure photo-metric matching, we propose matching of semantic features, pixel-wise classes and object instance borders between the consecutive images. In contrast to previous methods, we propose a network architecture that jointly predicts all outputs using shared encoders and allows passing information across the task-domains, e.g., the prediction of optical flow can benefit from the prediction of the depth. Furthermore, we explicitly learn the depth and optical flow occlusion maps inside the network, which are leveraged in order to improve the predictions in therespective regions. We present results on the popular KITTI dataset and show that our approach outperforms other methods by a large margin.