 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWenhao Ding
Trustworthy Reinforcement Learning Against Intrinsic Vulnerabilities: Robustness, Safety, and Generalizability
Sep 16, 2022
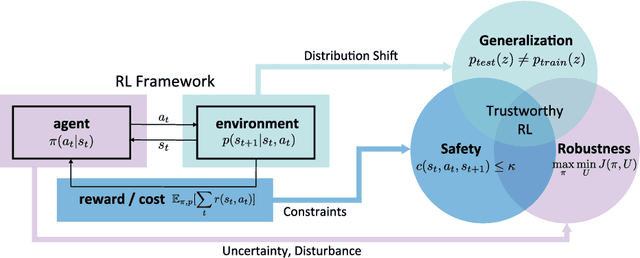
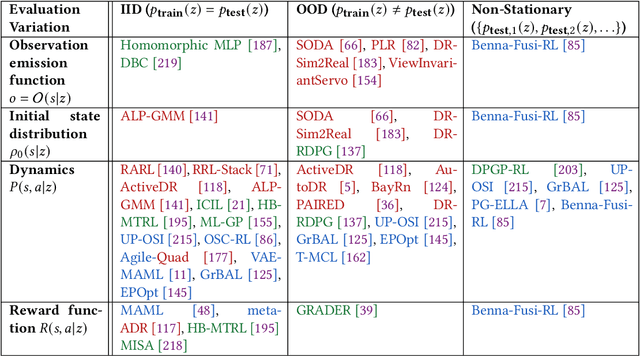
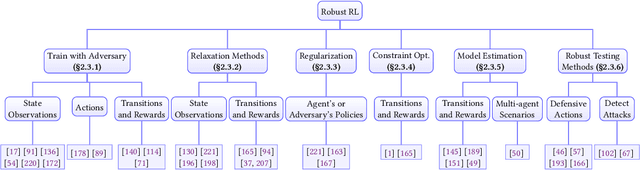
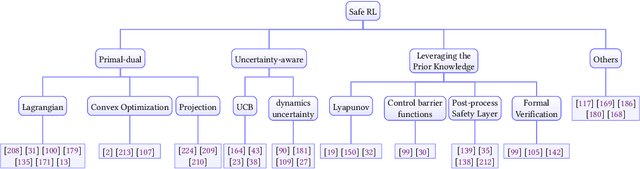
A trustworthy reinforcement learning algorithm should be competent in solving challenging real-world problems, including {robustly} handling uncertainties, satisfying {safety} constraints to avoid catastrophic failures, and {generalizing} to unseen scenarios during deployments. This study aims to overview these main perspectives of trustworthy reinforcement learning considering its intrinsic vulnerabilities on robustness, safety, and generalizability. In particular, we give rigorous formulations, categorize corresponding methodologies, and discuss benchmarks for each perspective. Moreover, we provide an outlook section to spur promising future directions with a brief discussion on extrinsic vulnerabilities considering human feedback. We hope this survey could bring together separate threads of studies together in a unified framework and promote the trustworthiness of reinforcement learning.
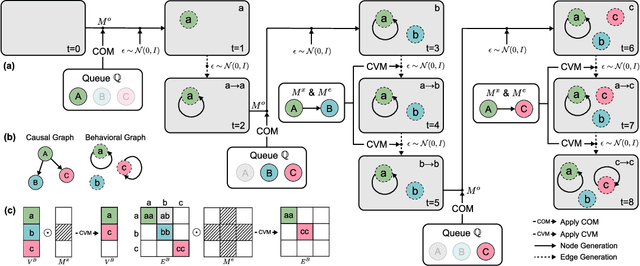
Generalizing Goal-Conditioned Reinforcement Learning with Variational Causal Reasoning
Jul 19, 2022
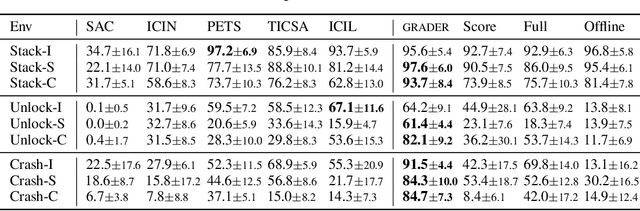
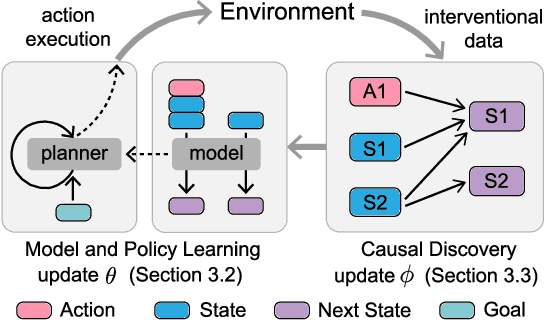
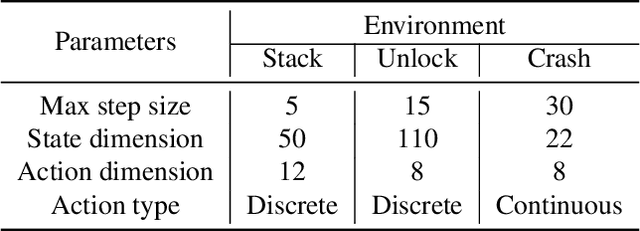
As a pivotal component to attaining generalizable solutions in human intelligence, reasoning provides great potential for reinforcement learning (RL) agents' generalization towards varied goals by summarizing part-to-whole arguments and discovering cause-and-effect relations. However, how to discover and represent causalities remains a huge gap that hinders the development of causal RL. In this paper, we augment Goal-Conditioned RL (GCRL) with Causal Graph (CG), a structure built upon the relation between objects and events. We novelly formulate the GCRL problem into variational likelihood maximization with CG as latent variables. To optimize the derived objective, we propose a framework with theoretical performance guarantees that alternates between two steps: using interventional data to estimate the posterior of CG; using CG to learn generalizable models and interpretable policies. Due to the lack of public benchmarks that verify generalization capability under reasoning, we design nine tasks and then empirically show the effectiveness of the proposed method against five baselines on these tasks. Further theoretical analysis shows that our performance improvement is attributed to the virtuous cycle of causal discovery, transition modeling, and policy training, which aligns with the experimental evidence in extensive ablation studies.
SafeBench: A Benchmarking Platform for Safety Evaluation of Autonomous Vehicles
Jun 20, 2022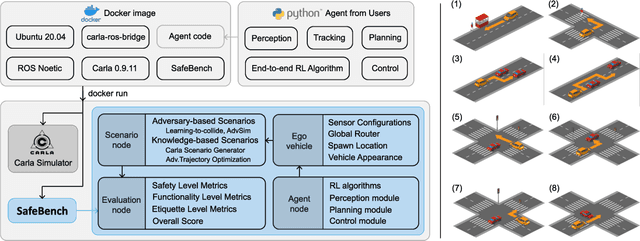
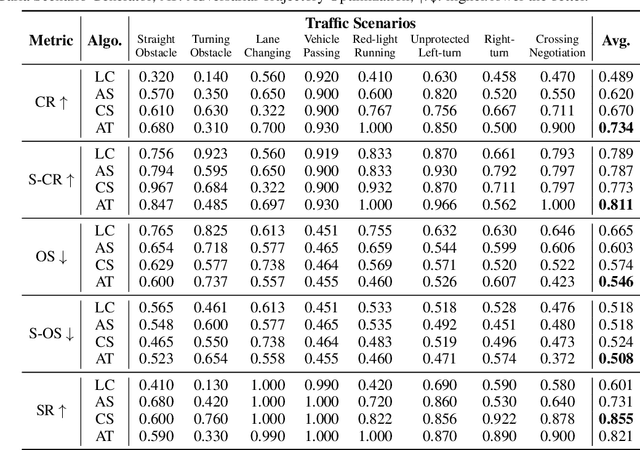
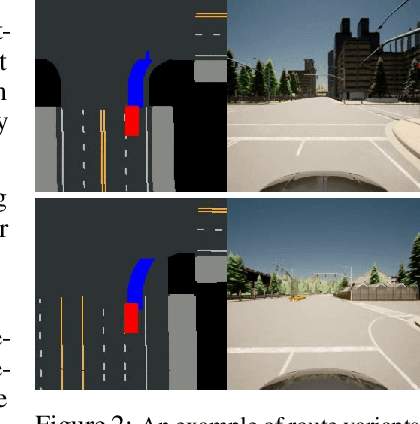
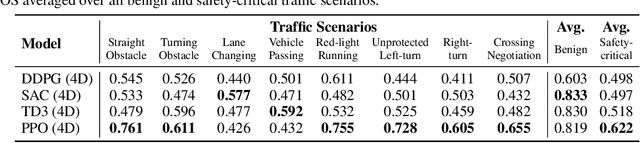
As shown by recent studies, machine intelligence-enabled systems are vulnerable to test cases resulting from either adversarial manipulation or natural distribution shifts. This has raised great concerns about deploying machine learning algorithms for real-world applications, especially in the safety-critical domains such as autonomous driving (AD). On the other hand, traditional AD testing on naturalistic scenarios requires hundreds of millions of driving miles due to the high dimensionality and rareness of the safety-critical scenarios in the real world. As a result, several approaches for autonomous driving evaluation have been explored, which are usually, however, based on different simulation platforms, types of safety-critical scenarios, scenario generation algorithms, and driving route variations. Thus, despite a large amount of effort in autonomous driving testing, it is still challenging to compare and understand the effectiveness and efficiency of different testing scenario generation algorithms and testing mechanisms under similar conditions. In this paper, we aim to provide the first unified platform SafeBench to integrate different types of safety-critical testing scenarios, scenario generation algorithms, and other variations such as driving routes and environments. Meanwhile, we implement 4 deep reinforcement learning-based AD algorithms with 4 types of input (e.g., bird's-eye view, camera) to perform fair comparisons on SafeBench. We find our generated testing scenarios are indeed more challenging and observe the trade-off between the performance of AD agents under benign and safety-critical testing scenarios. We believe our unified platform SafeBench for large-scale and effective autonomous driving testing will motivate the development of new testing scenario generation and safe AD algorithms. SafeBench is available at https://safebench.github.io.
A Survey on Safety-Critical Scenario Generation for Autonomous Driving -- A Methodological Perspective
Feb 07, 2022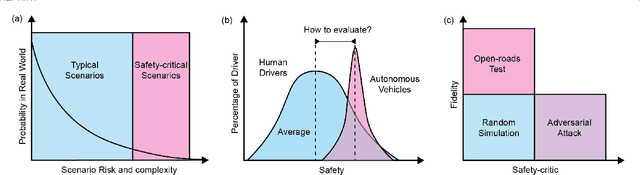
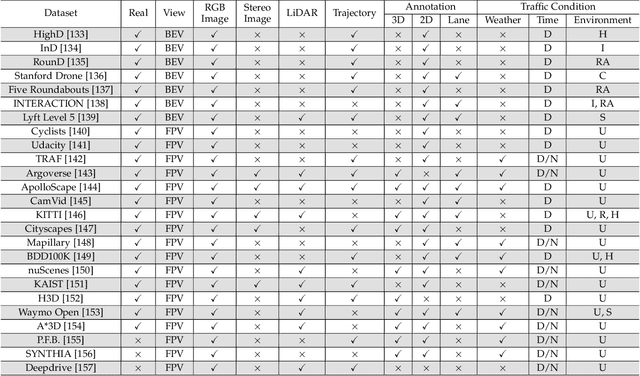

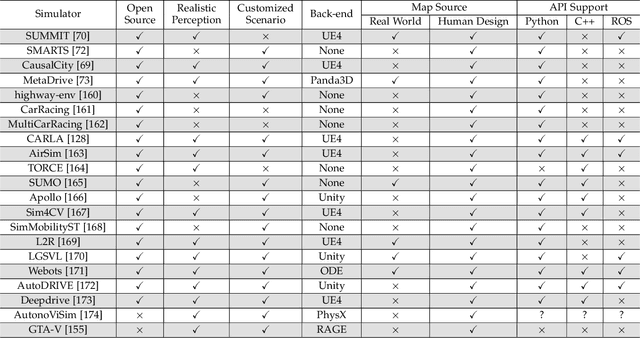
Autonomous driving systems have witnessed a great development during the past years thanks to the advance in sensing and decision-making. One critical obstacle for their massive deployment in the real world is the evaluation of safety. Most existing driving systems are still trained and evaluated on naturalistic scenarios that account for the vast majority of daily life or heuristically-generated adversarial ones. However, the large population of cars requires an extremely low collision rate, indicating safety-critical scenarios collected in the real world would be rare. Thus, methods to artificially generate artificial scenarios becomes critical to manage the risk and reduce the cost. In this survey, we focus on the algorithms of safety-critical scenario generation. We firstly provide a comprehensive taxonomy of existing algorithms by dividing them into three categories: data-driven generation, adversarial generation, and knowledge-based generation. Then, we discuss useful tools for scenario generation, including simulation platforms and packages. Finally, we extend our discussion to five main challenges of current works -- fidelity, efficiency, diversity, transferability, controllability -- and the research opportunities lighted up by these challenges.
Certifiable Deep Importance Sampling for Rare-Event Simulation of Black-Box Systems
Nov 03, 2021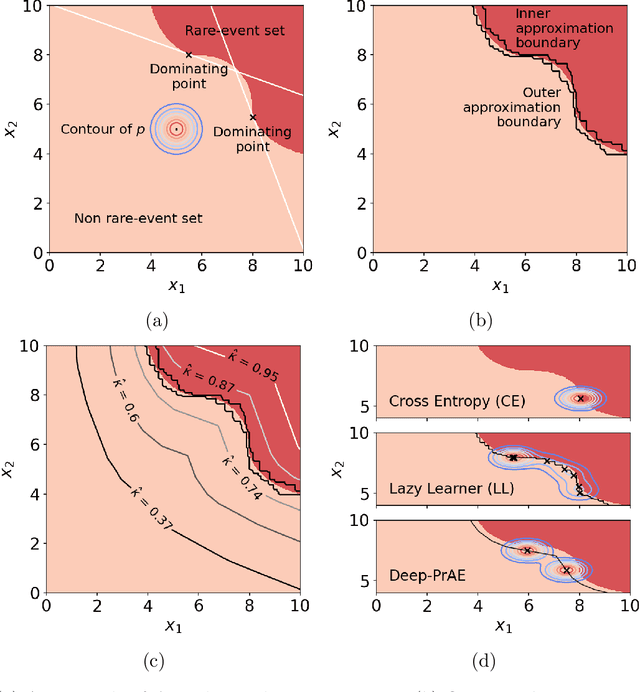
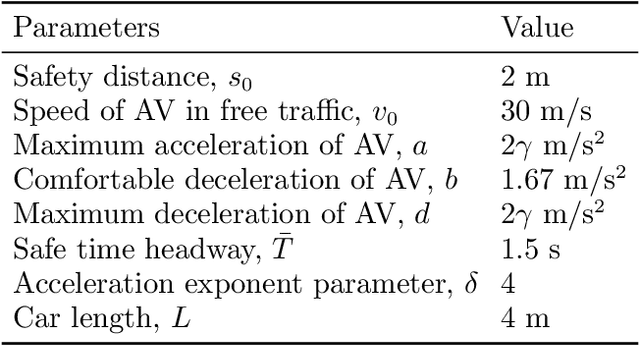
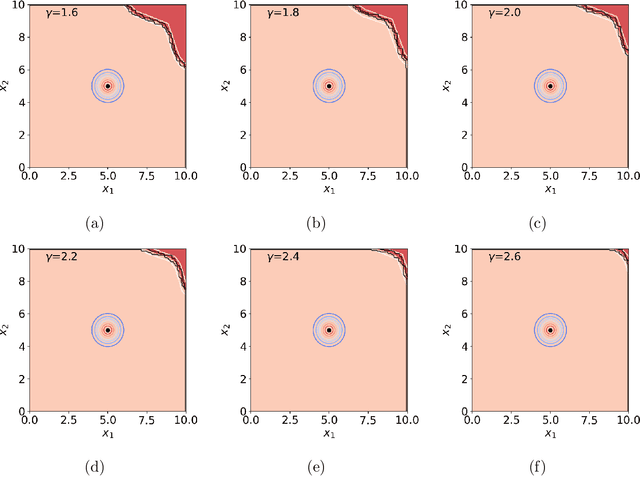
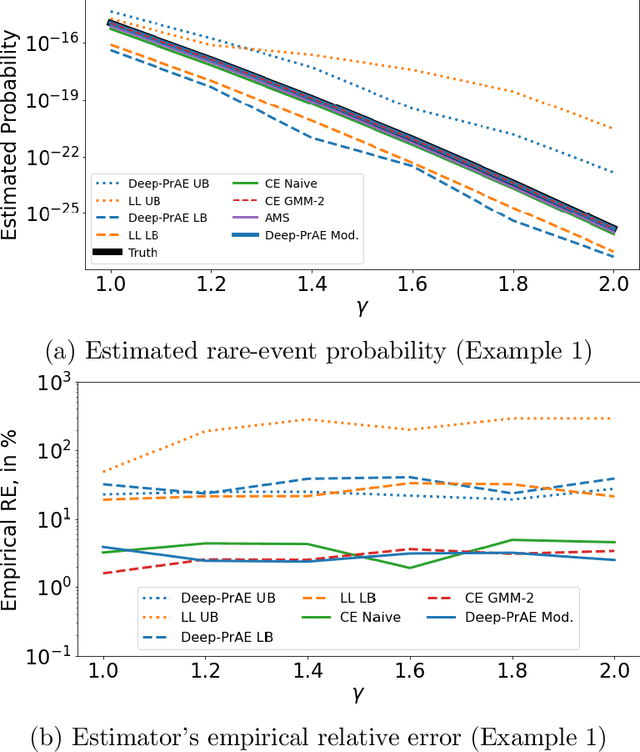
Rare-event simulation techniques, such as importance sampling (IS), constitute powerful tools to speed up challenging estimation of rare catastrophic events. These techniques often leverage the knowledge and analysis on underlying system structures to endow desirable efficiency guarantees. However, black-box problems, especially those arising from recent safety-critical applications of AI-driven physical systems, can fundamentally undermine their efficiency guarantees and lead to dangerous under-estimation without diagnostically detected. We propose a framework called Deep Probabilistic Accelerated Evaluation (Deep-PrAE) to design statistically guaranteed IS, by converting black-box samplers that are versatile but could lack guarantees, into one with what we call a relaxed efficiency certificate that allows accurate estimation of bounds on the rare-event probability. We present the theory of Deep-PrAE that combines the dominating point concept with rare-event set learning via deep neural network classifiers, and demonstrate its effectiveness in numerical examples including the safety-testing of intelligent driving algorithms.
CausalAF: Causal Autoregressive Flow for Goal-Directed Safety-Critical Scenes Generation
Oct 26, 2021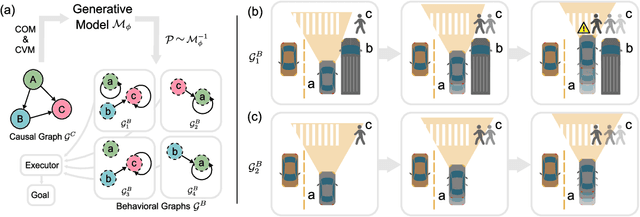
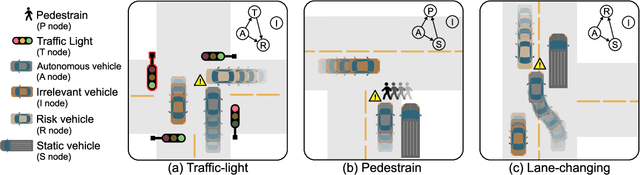
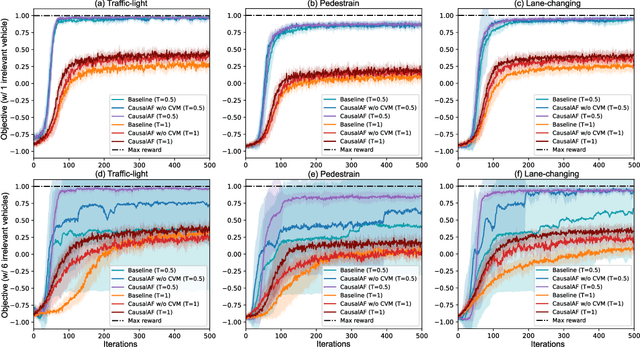
Goal-directed generation, aiming for solving downstream tasks by generating diverse data, has a potentially wide range of applications in the real world. Previous works tend to formulate goal-directed generation as a purely data-driven problem, which directly searches or approximates the distribution of samples satisfying the goal. However, the generation ability of preexisting work is heavily restricted by inefficient sampling, especially for sparse goals that rarely show up in off-the-shelf datasets. For instance, generating safety-critical traffic scenes with the goal of increasing the risk of collision is critical to evaluate autonomous vehicles, but the rareness of such scenes is the biggest resistance. In this paper, we integrate causality as a prior into the safety-critical scene generation process and propose a flow-based generative framework - Causal Autoregressive Flow (CausalAF). CausalAF encourages the generative model to uncover and follow the causal relationship among generated objects via novel causal masking operations instead of searching the sample only from observational data. By learning the cause-and-effect mechanism of how the generated scene achieves the goal rather than just learning correlations from data, CausalAF significantly improves the learning efficiency. Extensive experiments on three heterogeneous traffic scenes illustrate that CausalAF requires much fewer optimization resources to effectively generate goal-directed scenes for safety evaluation tasks.
Semantically Controllable Scene Generation with Guidance of Explicit Knowledge
Jun 08, 2021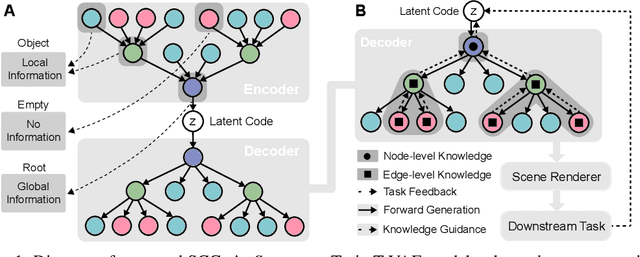
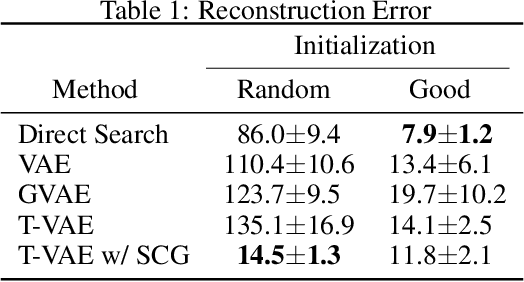
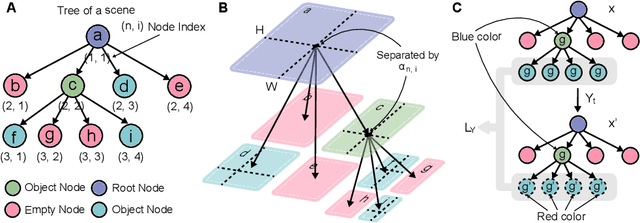

Deep Generative Models (DGMs) are known for their superior capability in generating realistic data. Extending purely data-driven approaches, recent specialized DGMs may satisfy additional controllable requirements such as embedding a traffic sign in a driving scene, by manipulating patterns \textit{implicitly} in the neuron or feature level. In this paper, we introduce a novel method to incorporate domain knowledge \textit{explicitly} in the generation process to achieve semantically controllable scene generation. We categorize our knowledge into two types to be consistent with the composition of natural scenes, where the first type represents the property of objects and the second type represents the relationship among objects. We then propose a tree-structured generative model to learn complex scene representation, whose nodes and edges are naturally corresponding to the two types of knowledge respectively. Knowledge can be explicitly integrated to enable semantically controllable scene generation by imposing semantic rules on properties of nodes and edges in the tree structure. We construct a synthetic example to illustrate the controllability and explainability of our method in a clean setting. We further extend the synthetic example to realistic autonomous vehicle driving environments and conduct extensive experiments to show that our method efficiently identifies adversarial traffic scenes against different state-of-the-art 3D point cloud segmentation models satisfying the traffic rules specified as the explicit knowledge.
Context-Aware Safe Reinforcement Learning for Non-Stationary Environments
Jan 02, 2021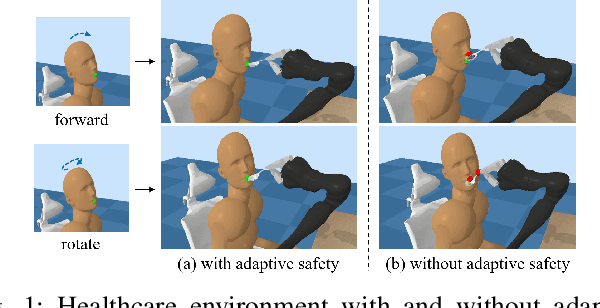
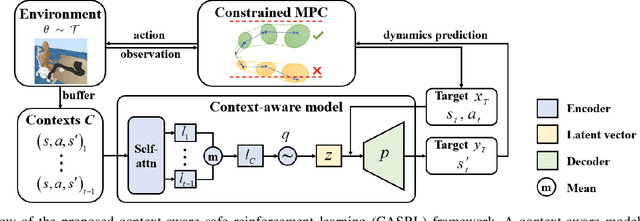
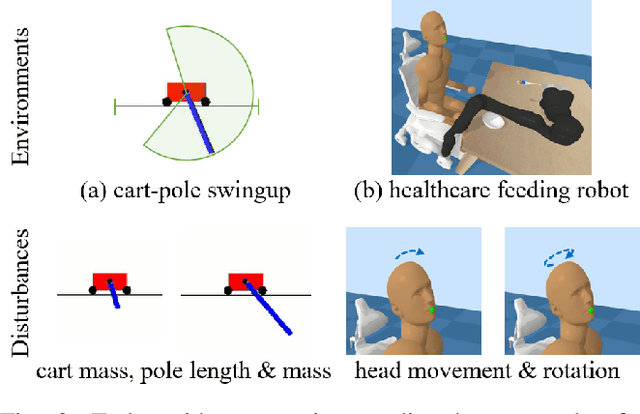
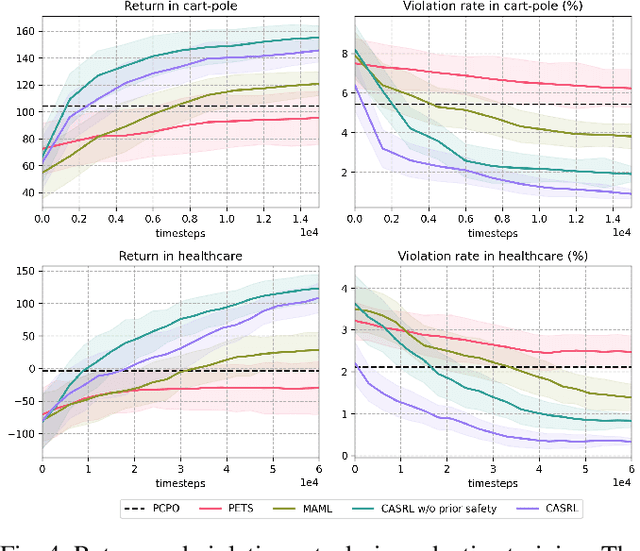
Safety is a critical concern when deploying reinforcement learning agents for realistic tasks. Recently, safe reinforcement learning algorithms have been developed to optimize the agent's performance while avoiding violations of safety constraints. However, few studies have addressed the non-stationary disturbances in the environments, which may cause catastrophic outcomes. In this paper, we propose the context-aware safe reinforcement learning (CASRL) method, a meta-learning framework to realize safe adaptation in non-stationary environments. We use a probabilistic latent variable model to achieve fast inference of the posterior environment transition distribution given the context data. Safety constraints are then evaluated with uncertainty-aware trajectory sampling. The high cost of safety violations leads to the rareness of unsafe records in the dataset. We address this issue by enabling prioritized sampling during model training and formulating prior safety constraints with domain knowledge during constrained planning. The algorithm is evaluated in realistic safety-critical environments with non-stationary disturbances. Results show that the proposed algorithm significantly outperforms existing baselines in terms of safety and robustness.
Multimodal Safety-Critical Scenarios Generation for Decision-Making Algorithms Evaluation
Sep 25, 2020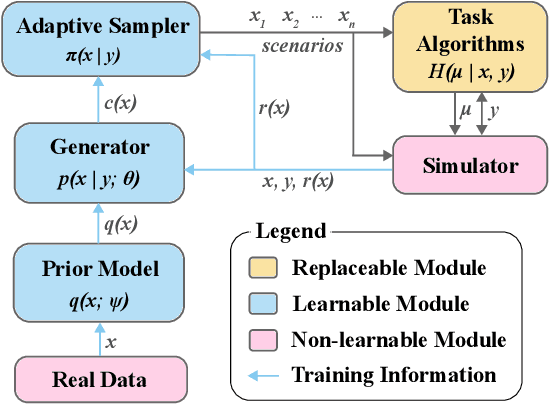
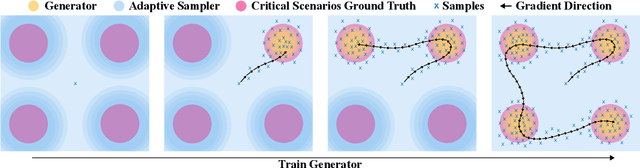
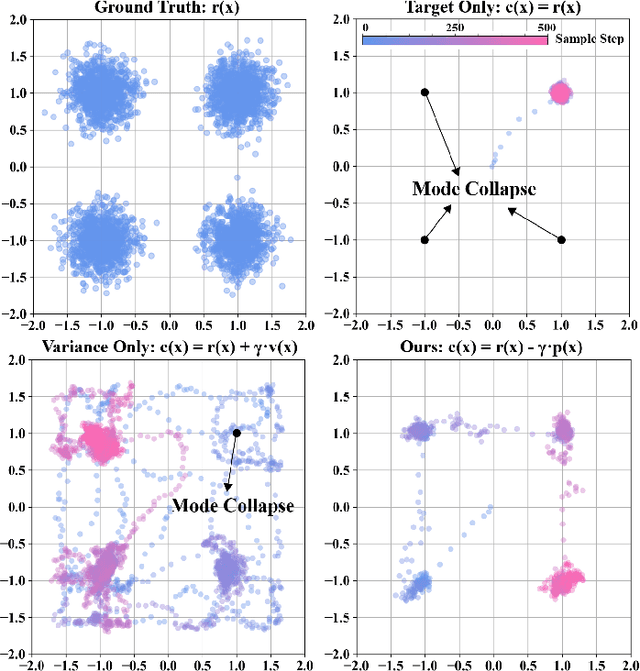
Existing neural network-based autonomous systems are shown to be vulnerable against adversarial attacks, therefore sophisticated evaluation on their robustness is of great importance. However, evaluating the robustness only under the worst-case scenarios based on known attacks is not comprehensive, not to mention that some of them even rarely occur in the real world. In addition, the distribution of safety-critical data is usually multimodal, while most traditional attacks and evaluation methods focus on a single modality. To solve the above challenges, we propose a flow-based multimodal safety-critical scenario generator for evaluating decisionmaking algorithms. The proposed generative model is optimized with weighted likelihood maximization and a gradient-based sampling procedure is integrated to improve the sampling efficiency. The safety-critical scenarios are generated by querying the task algorithms and the log-likelihood of the generated scenarios is in proportion to the risk level. Experiments on a self-driving task demonstrate our advantages in terms of testing efficiency and multimodal modeling capability. We evaluate six Reinforcement Learning algorithms with our generated traffic scenarios and provide empirical conclusions about their robustness.