 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImitation Learning for Adaptive Control of a Virtual Soft Exoglove
May 14, 2025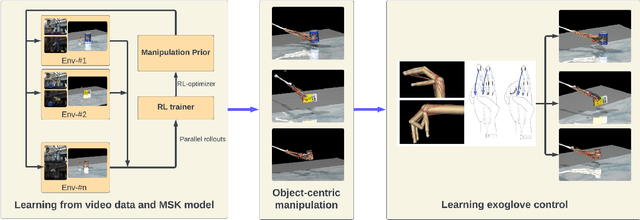

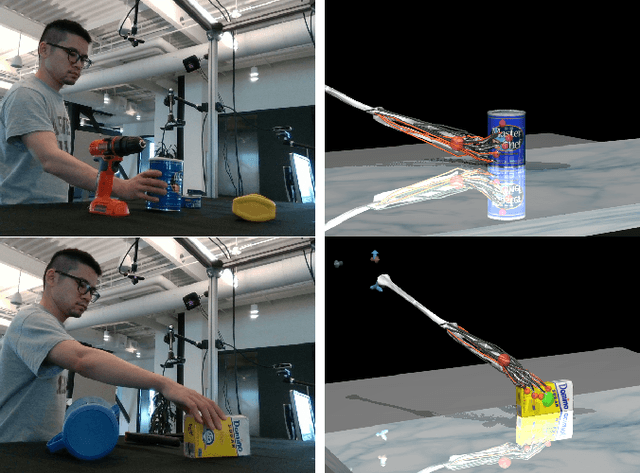
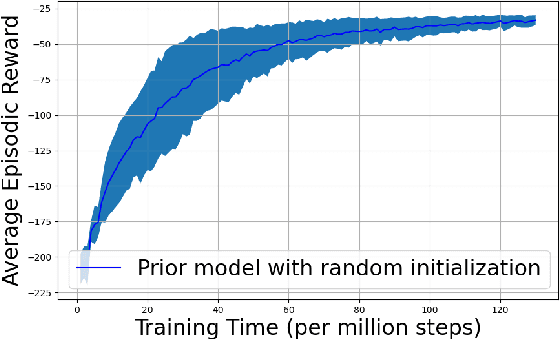
The use of wearable robots has been widely adopted in rehabilitation training for patients with hand motor impairments. However, the uniqueness of patients' muscle loss is often overlooked. Leveraging reinforcement learning and a biologically accurate musculoskeletal model in simulation, we propose a customized wearable robotic controller that is able to address specific muscle deficits and to provide compensation for hand-object manipulation tasks. Video data of a same subject performing human grasping tasks is used to train a manipulation model through learning from demonstration. This manipulation model is subsequently fine-tuned to perform object-specific interaction tasks. The muscle forces in the musculoskeletal manipulation model are then weakened to simulate neurological motor impairments, which are later compensated by the actuation of a virtual wearable robotics glove. Results shows that integrating the virtual wearable robotic glove provides shared assistance to support the hand manipulator with weakened muscle forces. The learned exoglove controller achieved an average of 90.5\% of the original manipulation proficiency.
RoboHive: A Unified Framework for Robot Learning
Oct 10, 2023



We present RoboHive, a comprehensive software platform and ecosystem for research in the field of Robot Learning and Embodied Artificial Intelligence. Our platform encompasses a diverse range of pre-existing and novel environments, including dexterous manipulation with the Shadow Hand, whole-arm manipulation tasks with Franka and Fetch robots, quadruped locomotion, among others. Included environments are organized within and cover multiple domains such as hand manipulation, locomotion, multi-task, multi-agent, muscles, etc. In comparison to prior works, RoboHive offers a streamlined and unified task interface taking dependency on only a minimal set of well-maintained packages, features tasks with high physics fidelity and rich visual diversity, and supports common hardware drivers for real-world deployment. The unified interface of RoboHive offers a convenient and accessible abstraction for algorithmic research in imitation, reinforcement, multi-task, and hierarchical learning. Furthermore, RoboHive includes expert demonstrations and baseline results for most environments, providing a standard for benchmarking and comparisons. Details: https://sites.google.com/view/robohive
Natural and Robust Walking using Reinforcement Learning without Demonstrations in High-Dimensional Musculoskeletal Models
Sep 07, 2023



Humans excel at robust bipedal walking in complex natural environments. In each step, they adequately tune the interaction of biomechanical muscle dynamics and neuronal signals to be robust against uncertainties in ground conditions. However, it is still not fully understood how the nervous system resolves the musculoskeletal redundancy to solve the multi-objective control problem considering stability, robustness, and energy efficiency. In computer simulations, energy minimization has been shown to be a successful optimization target, reproducing natural walking with trajectory optimization or reflex-based control methods. However, these methods focus on particular motions at a time and the resulting controllers are limited when compensating for perturbations. In robotics, reinforcement learning~(RL) methods recently achieved highly stable (and efficient) locomotion on quadruped systems, but the generation of human-like walking with bipedal biomechanical models has required extensive use of expert data sets. This strong reliance on demonstrations often results in brittle policies and limits the application to new behaviors, especially considering the potential variety of movements for high-dimensional musculoskeletal models in 3D. Achieving natural locomotion with RL without sacrificing its incredible robustness might pave the way for a novel approach to studying human walking in complex natural environments. Videos: https://sites.google.com/view/naturalwalkingrl
MyoDex: A Generalizable Prior for Dexterous Manipulation
Sep 06, 2023



Human dexterity is a hallmark of motor control. Our hands can rapidly synthesize new behaviors despite the complexity (multi-articular and multi-joints, with 23 joints controlled by more than 40 muscles) of musculoskeletal sensory-motor circuits. In this work, we take inspiration from how human dexterity builds on a diversity of prior experiences, instead of being acquired through a single task. Motivated by this observation, we set out to develop agents that can build upon their previous experience to quickly acquire new (previously unattainable) behaviors. Specifically, our approach leverages multi-task learning to implicitly capture task-agnostic behavioral priors (MyoDex) for human-like dexterity, using a physiologically realistic human hand model - MyoHand. We demonstrate MyoDex's effectiveness in few-shot generalization as well as positive transfer to a large repertoire of unseen dexterous manipulation tasks. Agents leveraging MyoDex can solve approximately 3x more tasks, and 4x faster in comparison to a distillation baseline. While prior work has synthesized single musculoskeletal control behaviors, MyoDex is the first generalizable manipulation prior that catalyzes the learning of dexterous physiological control across a large variety of contact-rich behaviors. We also demonstrate the effectiveness of our paradigms beyond musculoskeletal control towards the acquisition of dexterity in 24 DoF Adroit Hand. Website: https://sites.google.com/view/myodex
SAR: Generalization of Physiological Agility and Dexterity via Synergistic Action Representation
Jul 14, 2023Learning effective continuous control policies in high-dimensional systems, including musculoskeletal agents, remains a significant challenge. Over the course of biological evolution, organisms have developed robust mechanisms for overcoming this complexity to learn highly sophisticated strategies for motor control. What accounts for this robust behavioral flexibility? Modular control via muscle synergies, i.e. coordinated muscle co-contractions, is considered to be one putative mechanism that enables organisms to learn muscle control in a simplified and generalizable action space. Drawing inspiration from this evolved motor control strategy, we use physiologically accurate human hand and leg models as a testbed for determining the extent to which a Synergistic Action Representation (SAR) acquired from simpler tasks facilitates learning more complex tasks. We find in both cases that SAR-exploiting policies significantly outperform end-to-end reinforcement learning. Policies trained with SAR were able to achieve robust locomotion on a wide set of terrains with high sample efficiency, while baseline approaches failed to learn meaningful behaviors. Additionally, policies trained with SAR on a multiobject manipulation task significantly outperformed (>70% success) baseline approaches (<20% success). Both of these SAR-exploiting policies were also found to generalize zero-shot to out-of-domain environmental conditions, while policies that did not adopt SAR failed to generalize. Finally, we establish the generality of SAR on broader high-dimensional control problems using a robotic manipulation task set and a full-body humanoid locomotion task. To the best of our knowledge, this investigation is the first of its kind to present an end-to-end pipeline for discovering synergies and using this representation to learn high-dimensional continuous control across a wide diversity of tasks.
MyoSuite -- A contact-rich simulation suite for musculoskeletal motor control
May 26, 2022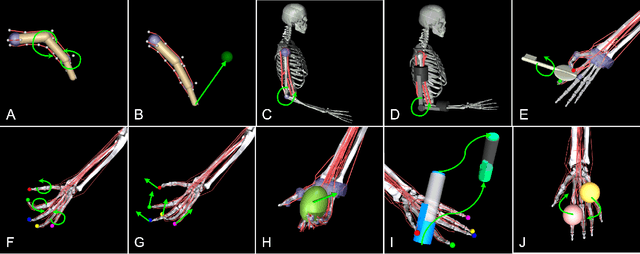
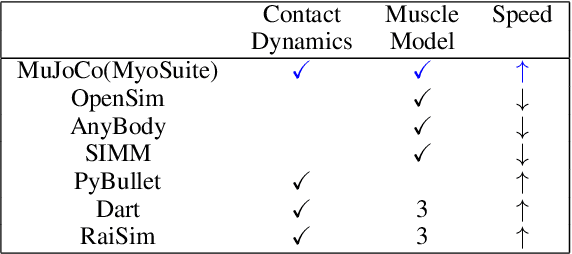
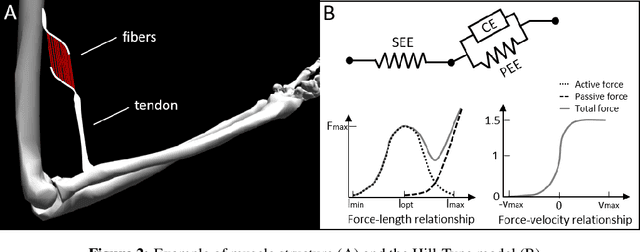
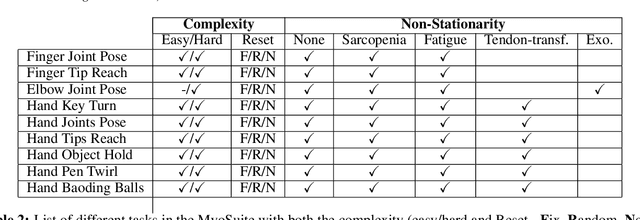
Embodied agents in continuous control domains have had limited exposure to tasks allowing to explore musculoskeletal properties that enable agile and nimble behaviors in biological beings. The sophistication behind neuro-musculoskeletal control can pose new challenges for the motor learning community. At the same time, agents solving complex neural control problems allow impact in fields such as neuro-rehabilitation, as well as collaborative-robotics. Human biomechanics underlies complex multi-joint-multi-actuator musculoskeletal systems. The sensory-motor system relies on a range of sensory-contact rich and proprioceptive inputs that define and condition muscle actuation required to exhibit intelligent behaviors in the physical world. Current frameworks for musculoskeletal control do not support physiological sophistication of the musculoskeletal systems along with physical world interaction capabilities. In addition, they are neither embedded in complex and skillful motor tasks nor are computationally effective and scalable to study large-scale learning paradigms. Here, we present MyoSuite -- a suite of physiologically accurate biomechanical models of elbow, wrist, and hand, with physical contact capabilities, which allow learning of complex and skillful contact-rich real-world tasks. We provide diverse motor-control challenges: from simple postural control to skilled hand-object interactions such as turning a key, twirling a pen, rotating two balls in one hand, etc. By supporting physiological alterations in musculoskeletal geometry (tendon transfer), assistive devices (exoskeleton assistance), and muscle contraction dynamics (muscle fatigue, sarcopenia), we present real-life tasks with temporal changes, thereby exposing realistic non-stationary conditions in our tasks which most continuous control benchmarks lack.