 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying Ergonomics in the Elevate Soft Robotic Suit
Jan 24, 2026Soft robotic suits have the potential to rehabilitate, assist, and augment the human body. The low weight, cost, and minimal form-factor of these devices make them ideal for daily use by both healthy and impaired individuals. However, challenges associated with data-driven, user-specific, and comfort-first design of human-robot interfaces using soft materials limit their widespread translation and adoption. In this work, we present the quantitative evaluation of ergonomics and comfort of the Elevate suit - a cable driven soft robotic suit that assists shoulder elevation. Using a motion-capture system and force sensors, we measured the suit's ergonomics during assisted shoulder elevation up to 70 degrees. Two 4-hour sessions were conducted with one subject, involving transmitting cable tensions of up to 200N with no discomfort reported. We estimated that the pressure applied to the shoulder during assisted movements was within the range seen in a human grasp (approximately 69.1-85.1kPa), and estimated volumetric compression of <3% and <8% across the torso and upper arm, respectively. These results provide early validation of Elevate's ergonomic design in preparation for future studies with patient groups.
Neural Agonist-Antagonist Coupling in the Absence of Mechanical Coupling after Targeted Muscle Reinnervation
Jan 23, 2026Following limb amputation and targeted muscle reinnervation (TMR), nerves supplying agonist and antagonist muscles are rerouted into separate targeted muscles, disrupting natural neuromechanical coupling between muscle groups. Using high-density intramuscular microelectrode arrays in reinnervated muscles, we show that neural signals for agonist and antagonist tasks remain functionally coupled: motor units active during agonist tasks were also recruited during corresponding antagonist tasks, despite no visual feedback on coactivation being provided.
Intuitive control of supernumerary robotic limbs through a tactile-encoded neural interface
Nov 11, 2025



Brain-computer interfaces (BCIs) promise to extend human movement capabilities by enabling direct neural control of supernumerary effectors, yet integrating augmented commands with multiple degrees of freedom without disrupting natural movement remains a key challenge. Here, we propose a tactile-encoded BCI that leverages sensory afferents through a novel tactile-evoked P300 paradigm, allowing intuitive and reliable decoding of supernumerary motor intentions even when superimposed with voluntary actions. The interface was evaluated in a multi-day experiment comprising of a single motor recognition task to validate baseline BCI performance and a dual task paradigm to assess the potential influence between the BCI and natural human movement. The brain interface achieved real-time and reliable decoding of four supernumerary degrees of freedom, with significant performance improvements after only three days of training. Importantly, after training, performance did not differ significantly between the single- and dual-BCI task conditions, and natural movement remained unimpaired during concurrent supernumerary control. Lastly, the interface was deployed in a movement augmentation task, demonstrating its ability to command two supernumerary robotic arms for functional assistance during bimanual tasks. These results establish a new neural interface paradigm for movement augmentation through stimulation of sensory afferents, expanding motor degrees of freedom without impairing natural movement.
Spiking Neural Network Decoders of Finger Forces from High-Density Intramuscular Microelectrode Arrays
Sep 04, 2025



Restoring naturalistic finger control in assistive technologies requires the continuous decoding of motor intent with high accuracy, efficiency, and robustness. Here, we present a spike-based decoding framework that integrates spiking neural networks (SNNs) with motor unit activity extracted from high-density intramuscular microelectrode arrays. We demonstrate simultaneous and proportional decoding of individual finger forces from motor unit spike trains during isometric contractions at 15% of maximum voluntary contraction using SNNs. We systematically evaluated alternative SNN decoder configurations and compared two possible input modalities: physiologically grounded motor unit spike trains and spike-encoded intramuscular EMG signals. Through this comparison, we quantified trade-offs between decoding accuracy, memory footprint, and robustness to input errors. The results showed that shallow SNNs can reliably decode finger-level motor intent with competitive accuracy and minimal latency, while operating with reduced memory requirements and without the need for external preprocessing buffers. This work provides a practical blueprint for integrating SNNs into finger-level force decoding systems, demonstrating how the choice of input representation can be strategically tailored to meet application-specific requirements for accuracy, robustness, and memory efficiency.
Imitation Learning for Adaptive Control of a Virtual Soft Exoglove
May 14, 2025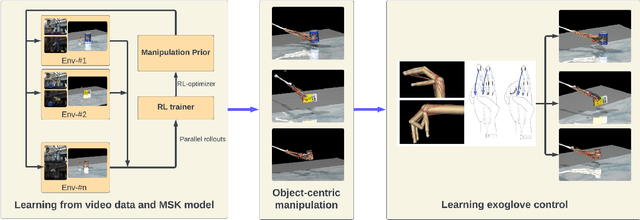

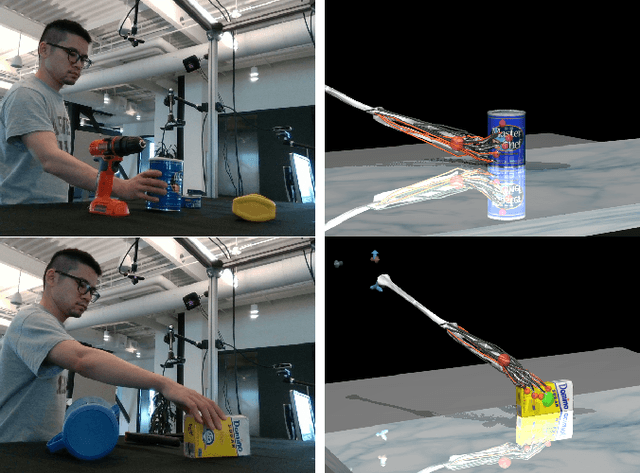
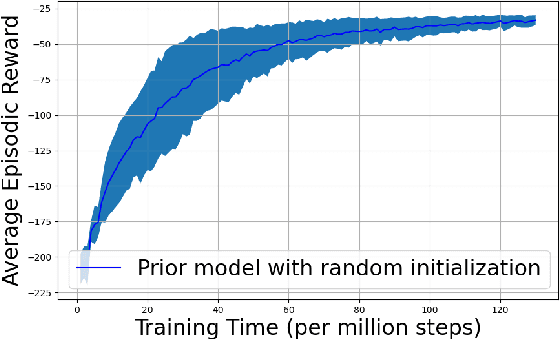
The use of wearable robots has been widely adopted in rehabilitation training for patients with hand motor impairments. However, the uniqueness of patients' muscle loss is often overlooked. Leveraging reinforcement learning and a biologically accurate musculoskeletal model in simulation, we propose a customized wearable robotic controller that is able to address specific muscle deficits and to provide compensation for hand-object manipulation tasks. Video data of a same subject performing human grasping tasks is used to train a manipulation model through learning from demonstration. This manipulation model is subsequently fine-tuned to perform object-specific interaction tasks. The muscle forces in the musculoskeletal manipulation model are then weakened to simulate neurological motor impairments, which are later compensated by the actuation of a virtual wearable robotics glove. Results shows that integrating the virtual wearable robotic glove provides shared assistance to support the hand manipulator with weakened muscle forces. The learned exoglove controller achieved an average of 90.5\% of the original manipulation proficiency.
Switch-based Independent Antagonist Actuation with a Single Motor for a Soft Exosuit
Feb 07, 2025



The use of a cable-driven soft exosuit poses challenges with regards to the mechanical design of the actuation system, particularly when used for actuation along multiple degrees of freedom (DoF). The simplest general solution requires the use of two actuators to be capable of inducing movement along one DoF. However, this solution is not practical for the development of multi-joint exosuits. Reducing the number of actuators is a critical need in multi-DoF exosuits. We propose a switch-based mechanism to control an antagonist pair of cables such that it can actuate along any cable path geometry. The results showed that 298.24ms was needed for switching between cables. While this latency is relatively large, it can reduced in the future by a better choice of the motor used for actuation.
Unlocking the Full Potential of High-Density Surface EMG: Novel Non-Invasive High-Yield Motor Unit Decomposition
Oct 18, 2024The decomposition of high-density surface electromyography (HD-sEMG) signals into motor unit discharge patterns has become a powerful tool for investigating the neural control of movement, providing insights into motor neuron recruitment and discharge behavior. However, current algorithms, while very effective under certain conditions, face significant challenges in complex scenarios, as their accuracy and motor unit yield are highly dependent on anatomical differences among individuals. This can limit the number of decomposed motor units, particularly in challenging conditions. To address this issue, we recently introduced Swarm-Contrastive Decomposition (SCD), which dynamically adjusts the separation function based on the distribution of the data and prevents convergence to the same source. Initially applied to intramuscular EMG signals, SCD is here adapted for HD-sEMG signals. We demonstrated its ability to address key challenges faced by existing methods, particularly in identifying low-amplitude motor unit action potentials and effectively handling complex decomposition scenarios, like high-interference signals. We extensively validated SCD using simulated and experimental HD-sEMG recordings and compared it with current state-of-the-art decomposition methods under varying conditions, including different excitation levels, noise intensities, force profiles, sexes, and muscle groups. The proposed method consistently outperformed existing techniques in both the quantity of decoded motor units and the precision of their firing time identification. For instance, under certain experimental conditions, SCD detected more than three times as many motor units compared to previous methods, while also significantly improving accuracy. These advancements represent a major step forward in non-invasive EMG technology for studying motor unit activity in complex scenarios.
Separation of Neural Drives to Muscles from Transferred Polyfunctional Nerves using Implanted Micro-electrode Arrays
Oct 14, 2024



Following limb amputation, neural signals for limb functions persist in the residual peripheral nerves. Targeted muscle reinnervation (TMR) allows to redirected these signals into spare muscles to recover the neural information through electromyography (EMG). However, a significant challenge arises in separating distinct neural commands redirected from the transferred nerves to the muscles. Disentangling overlapping signals from EMG recordings remains complex, as they can contain mixed neural information that complicates limb function interpretation. To address this challenge, Regenerative Peripheral Nerve Interfaces (RPNIs) surgically partition the nerve into individual fascicles that reinnervate specific muscle grafts, isolating distinct neural sources for more precise control and interpretation of EMG signals. We introduce a novel biointerface that combines TMR surgery of polyvalent nerves with a high-density micro-electrode array implanted at a single site within a reinnervated muscle. Instead of surgically identifying distinct nerve fascicles, our approach separates all neural signals that are re-directed into a single muscle, using the high spatio-temporal selectivity of the micro-electrode array and mathematical source separation methods. We recorded EMG signals from four reinnervated muscles while volunteers performed phantom limb tasks. The decomposition of these signals into motor unit activity revealed distinct clusters of motor neurons associated with diverse functional tasks. Notably, our method enabled the extraction of multiple neural commands within a single reinnervated muscle, eliminating the need for surgical nerve division. This approach not only has the potential of enhancing prosthesis control but also uncovers mechanisms of motor neuron synergies following TMR, providing valuable insights into how the central nervous system encodes movement after reinnervation.
Intramuscular High-Density Micro-Electrode Arrays Enable High-Precision Decoding and Mapping of Spinal Motor Neurons to Reveal Hand Control
Oct 14, 2024



Decoding nervous system activity is a key challenge in neuroscience and neural interfacing. In this study, we propose a novel neural decoding system that enables unprecedented large-scale sampling of muscle activity. Using micro-electrode arrays with more than 100 channels embedded within the forearm muscles, we recorded high-density signals that captured multi-unit motor neuron activity. This extensive sampling was complemented by advanced methods for neural decomposition, analysis, and classification, allowing us to accurately detect and interpret the spiking activity of spinal motor neurons that innervate hand muscles. We evaluated this system in two healthy participants, each implanted with three electromyogram (EMG) micro-electrode arrays (comprising 40 electrodes each) in the forearm. These arrays recorded muscle activity during both single- and multi-digit isometric contractions. For the first time under controlled conditions, we demonstrate that multi-digit tasks elicit unique patterns of motor neuron recruitment specific to each task, rather than employing combinations of recruitment patterns from single-digit tasks. This observation led us to hypothesize that hand tasks could be classified with high precision based on the decoded neural activity. We achieved perfect classification accuracy (100%) across 12 distinct single- and multi-digit tasks, and consistently high accuracy (>96\%) across all conditions and subjects, for up to 16 task classes. These results significantly outperformed conventional EMG classification methods. The exceptional performance of this system paves the way for developing advanced neural interfaces based on invasive high-density EMG technology. This innovation could greatly enhance human-computer interaction and lead to substantial improvements in assistive technologies, offering new possibilities for restoring motor function in clinical applications.
Spatial Adaptation Layer: Interpretable Domain Adaptation For Biosignal Sensor Array Applications
Sep 12, 2024



Biosignal acquisition is key for healthcare applications and wearable devices, with machine learning offering promising methods for processing signals like surface electromyography (sEMG) and electroencephalography (EEG). Despite high within-session performance, intersession performance is hindered by electrode shift, a known issue across modalities. Existing solutions often require large and expensive datasets and/or lack robustness and interpretability. Thus, we propose the Spatial Adaptation Layer (SAL), which can be prepended to any biosignal array model and learns a parametrized affine transformation at the input between two recording sessions. We also introduce learnable baseline normalization (LBN) to reduce baseline fluctuations. Tested on two HD-sEMG gesture recognition datasets, SAL and LBN outperform standard fine-tuning on regular arrays, achieving competitive performance even with a logistic regressor, with orders of magnitude less, physically interpretable parameters. Our ablation study shows that forearm circumferential translations account for the majority of performance improvements, in line with sEMG physiological expectations.