 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeshFlow: Efficient Artistic Mesh Generation via MeshVAE and Flow-based Diffusion Transformer
Jun 03, 2026We present MeshFlow, a new method for generating artist-like 3D meshes. Current mesh generators often adopt Auto-Regressive (AR) next-token prediction, a natural choice given the discrete nature of mesh topology. However, AR methods scale poorly because the inference cost is quadratic in mesh size. They also require discretizing the vertex coordinates, which introduces quantization errors. To address these challenges, we introduce a Variational Autoencoder (VAE) that, supervised with a contrastive loss, represents both continuous vertex positions and discrete connectivity in a continuous latent space. This latent space is significantly more compact than prior token-based mesh representations. We then build a 3D generator based on a Rectified Flow transformer, generating all mesh vertices and edges in parallel. Our model generates meshes 18x faster than the fastest AR generator while also achieving excellent accuracy across standard mesh-generation metrics. Homepage: https://mesh-flow.github.io/, Code: https://github.com/facebookresearch/meshflow
AssetGen: Deployable 3D Asset Generation at Interactive Speed
May 22, 2026While 3D generation is progressing rapidly, recent work has often focused on obtaining high-resolution assets, leaving user experience and deployability as afterthoughts. We present AssetGen, a 3D generator that focuses instead on these two aspects. Given one reference image, in 30 seconds it produces a high-quality mesh with baked normals, a color texture, and a controlled polygon budget suitable for real-time rendering, including mobile use cases. The AssetGen Flash variant further reduces latency to 14 seconds for interactive and agentic creation loops. Our model generates the object geometry with a coarse-to-refine VecSet framework, which implements mesh simplification, cleaning, and normal baking on the GPU, and a fast parallel UV unwrapping. It then generates textures in a multi-view fashion, followed by backprojection and 3D inpainting. Model distillation, kernel optimization, and pipeline parallelization are co-designed to accelerate the system end-to-end. We introduce numerous automated and blind human evaluations and demonstrate competitive visual quality against leading commercial solutions in 30 seconds and preview-quality results in less than 15 seconds. The final result is a system that supports AI-assisted, deployable 3D content creation in interactive workflows.
ActionMesh: Animated 3D Mesh Generation with Temporal 3D Diffusion
Jan 22, 2026Generating animated 3D objects is at the heart of many applications, yet most advanced works are typically difficult to apply in practice because of their limited setup, their long runtime, or their limited quality. We introduce ActionMesh, a generative model that predicts production-ready 3D meshes "in action" in a feed-forward manner. Drawing inspiration from early video models, our key insight is to modify existing 3D diffusion models to include a temporal axis, resulting in a framework we dubbed "temporal 3D diffusion". Specifically, we first adapt the 3D diffusion stage to generate a sequence of synchronized latents representing time-varying and independent 3D shapes. Second, we design a temporal 3D autoencoder that translates a sequence of independent shapes into the corresponding deformations of a pre-defined reference shape, allowing us to build an animation. Combining these two components, ActionMesh generates animated 3D meshes from different inputs like a monocular video, a text description, or even a 3D mesh with a text prompt describing its animation. Besides, compared to previous approaches, our method is fast and produces results that are rig-free and topology consistent, hence enabling rapid iteration and seamless applications like texturing and retargeting. We evaluate our model on standard video-to-4D benchmarks (Consistent4D, Objaverse) and report state-of-the-art performances on both geometric accuracy and temporal consistency, demonstrating that our model can deliver animated 3D meshes with unprecedented speed and quality.
AutoPartGen: Autogressive 3D Part Generation and Discovery
Jul 17, 2025



We introduce AutoPartGen, a model that generates objects composed of 3D parts in an autoregressive manner. This model can take as input an image of an object, 2D masks of the object's parts, or an existing 3D object, and generate a corresponding compositional 3D reconstruction. Our approach builds upon 3DShape2VecSet, a recent latent 3D representation with powerful geometric expressiveness. We observe that this latent space exhibits strong compositional properties, making it particularly well-suited for part-based generation tasks. Specifically, AutoPartGen generates object parts autoregressively, predicting one part at a time while conditioning on previously generated parts and additional inputs, such as 2D images, masks, or 3D objects. This process continues until the model decides that all parts have been generated, thus determining automatically the type and number of parts. The resulting parts can be seamlessly assembled into coherent objects or scenes without requiring additional optimization. We evaluate both the overall 3D generation capabilities and the part-level generation quality of AutoPartGen, demonstrating that it achieves state-of-the-art performance in 3D part generation.
WildCAT3D: Appearance-Aware Multi-View Diffusion in the Wild
Jun 16, 2025Despite recent advances in sparse novel view synthesis (NVS) applied to object-centric scenes, scene-level NVS remains a challenge. A central issue is the lack of available clean multi-view training data, beyond manually curated datasets with limited diversity, camera variation, or licensing issues. On the other hand, an abundance of diverse and permissively-licensed data exists in the wild, consisting of scenes with varying appearances (illuminations, transient occlusions, etc.) from sources such as tourist photos. To this end, we present WildCAT3D, a framework for generating novel views of scenes learned from diverse 2D scene image data captured in the wild. We unlock training on these data sources by explicitly modeling global appearance conditions in images, extending the state-of-the-art multi-view diffusion paradigm to learn from scene views of varying appearances. Our trained model generalizes to new scenes at inference time, enabling the generation of multiple consistent novel views. WildCAT3D provides state-of-the-art results on single-view NVS in object- and scene-level settings, while training on strictly less data sources than prior methods. Additionally, it enables novel applications by providing global appearance control during generation.
Twinner: Shining Light on Digital Twins in a Few Snaps
Mar 11, 2025



We present the first large reconstruction model, Twinner, capable of recovering a scene's illumination as well as an object's geometry and material properties from only a few posed images. Twinner is based on the Large Reconstruction Model and innovates in three key ways: 1) We introduce a memory-efficient voxel-grid transformer whose memory scales only quadratically with the size of the voxel grid. 2) To deal with scarcity of high-quality ground-truth PBR-shaded models, we introduce a large fully-synthetic dataset of procedurally-generated PBR-textured objects lit with varied illumination. 3) To narrow the synthetic-to-real gap, we finetune the model on real life datasets by means of a differentiable physically-based shading model, eschewing the need for ground-truth illumination or material properties which are challenging to obtain in real life. We demonstrate the efficacy of our model on the real life StanfordORB benchmark where, given few input views, we achieve reconstruction quality significantly superior to existing feedforward reconstruction networks, and comparable to significantly slower per-scene optimization methods.
UnCommon Objects in 3D
Jan 13, 2025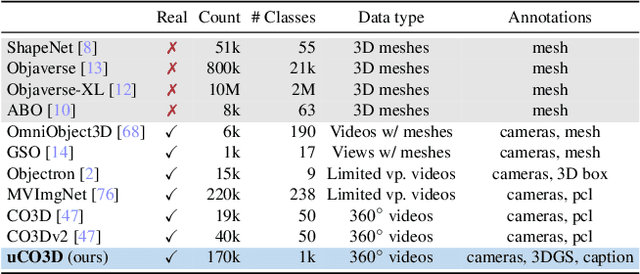
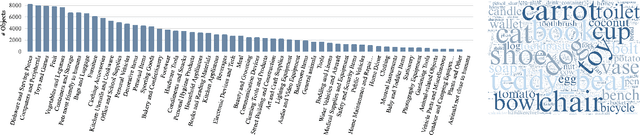
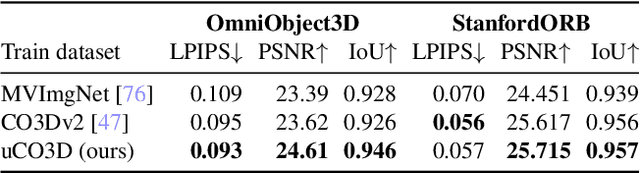
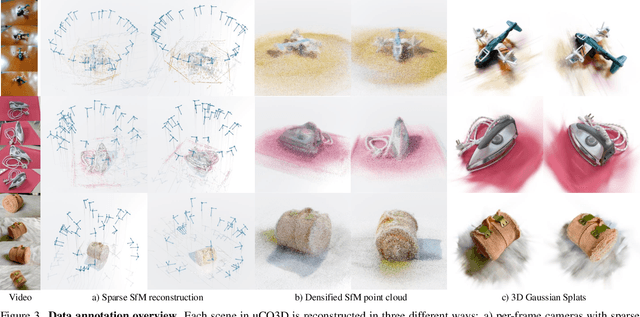
We introduce Uncommon Objects in 3D (uCO3D), a new object-centric dataset for 3D deep learning and 3D generative AI. uCO3D is the largest publicly-available collection of high-resolution videos of objects with 3D annotations that ensures full-360$^{\circ}$ coverage. uCO3D is significantly more diverse than MVImgNet and CO3Dv2, covering more than 1,000 object categories. It is also of higher quality, due to extensive quality checks of both the collected videos and the 3D annotations. Similar to analogous datasets, uCO3D contains annotations for 3D camera poses, depth maps and sparse point clouds. In addition, each object is equipped with a caption and a 3D Gaussian Splat reconstruction. We train several large 3D models on MVImgNet, CO3Dv2, and uCO3D and obtain superior results using the latter, showing that uCO3D is better for learning applications.
PartGen: Part-level 3D Generation and Reconstruction with Multi-View Diffusion Models
Dec 24, 2024



Text- or image-to-3D generators and 3D scanners can now produce 3D assets with high-quality shapes and textures. These assets typically consist of a single, fused representation, like an implicit neural field, a Gaussian mixture, or a mesh, without any useful structure. However, most applications and creative workflows require assets to be made of several meaningful parts that can be manipulated independently. To address this gap, we introduce PartGen, a novel approach that generates 3D objects composed of meaningful parts starting from text, an image, or an unstructured 3D object. First, given multiple views of a 3D object, generated or rendered, a multi-view diffusion model extracts a set of plausible and view-consistent part segmentations, dividing the object into parts. Then, a second multi-view diffusion model takes each part separately, fills in the occlusions, and uses those completed views for 3D reconstruction by feeding them to a 3D reconstruction network. This completion process considers the context of the entire object to ensure that the parts integrate cohesively. The generative completion model can make up for the information missing due to occlusions; in extreme cases, it can hallucinate entirely invisible parts based on the input 3D asset. We evaluate our method on generated and real 3D assets and show that it outperforms segmentation and part-extraction baselines by a large margin. We also showcase downstream applications such as 3D part editing.
Meta 3D Gen
Jul 02, 2024



We introduce Meta 3D Gen (3DGen), a new state-of-the-art, fast pipeline for text-to-3D asset generation. 3DGen offers 3D asset creation with high prompt fidelity and high-quality 3D shapes and textures in under a minute. It supports physically-based rendering (PBR), necessary for 3D asset relighting in real-world applications. Additionally, 3DGen supports generative retexturing of previously generated (or artist-created) 3D shapes using additional textual inputs provided by the user. 3DGen integrates key technical components, Meta 3D AssetGen and Meta 3D TextureGen, that we developed for text-to-3D and text-to-texture generation, respectively. By combining their strengths, 3DGen represents 3D objects simultaneously in three ways: in view space, in volumetric space, and in UV (or texture) space. The integration of these two techniques achieves a win rate of 68% with respect to the single-stage model. We compare 3DGen to numerous industry baselines, and show that it outperforms them in terms of prompt fidelity and visual quality for complex textual prompts, while being significantly faster.
Meta 3D AssetGen: Text-to-Mesh Generation with High-Quality Geometry, Texture, and PBR Materials
Jul 02, 2024



We present Meta 3D AssetGen (AssetGen), a significant advancement in text-to-3D generation which produces faithful, high-quality meshes with texture and material control. Compared to works that bake shading in the 3D object's appearance, AssetGen outputs physically-based rendering (PBR) materials, supporting realistic relighting. AssetGen generates first several views of the object with factored shaded and albedo appearance channels, and then reconstructs colours, metalness and roughness in 3D, using a deferred shading loss for efficient supervision. It also uses a sign-distance function to represent 3D shape more reliably and introduces a corresponding loss for direct shape supervision. This is implemented using fused kernels for high memory efficiency. After mesh extraction, a texture refinement transformer operating in UV space significantly improves sharpness and details. AssetGen achieves 17% improvement in Chamfer Distance and 40% in LPIPS over the best concurrent work for few-view reconstruction, and a human preference of 72% over the best industry competitors of comparable speed, including those that support PBR. Project page with generated assets: https://assetgen.github.io