 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing Subjective Perceptions of Robot-to-Human Handover Trajectories
Nov 16, 2022



Robots must move legibly around people for safety reasons, especially for tasks where physical contact is possible. One such task is handovers, which requires implicit communication on where and when physical contact (object transfer) occurs. In this work, we study whether the trajectory model used by a robot during the reaching phase affects the subjective perceptions of receivers for robot-to-human handovers. We conducted a user study where 32 participants were handed over three objects with four trajectory models: three were versions of a minimum jerk trajectory, and one was an ellipse-fitting-based trajectory. The start position of the handover was fixed for all trajectories, and the end position was allowed to vary randomly around a fixed position by $\pm$3 cm in all axis. The user study found no significant differences among the handover trajectories in survey questions relating to safety, predictability, naturalness, and other subjective metrics. While these results seemingly reject the hypothesis that the trajectory affects human perceptions of a handover, it prompts future research to investigate the effect of other variables, such as robot speed, object transfer position, object orientation at the transfer point, and explicit communication signals such as gaze and speech.
Visibility Maximization Controller for Robotic Manipulation
Feb 25, 2022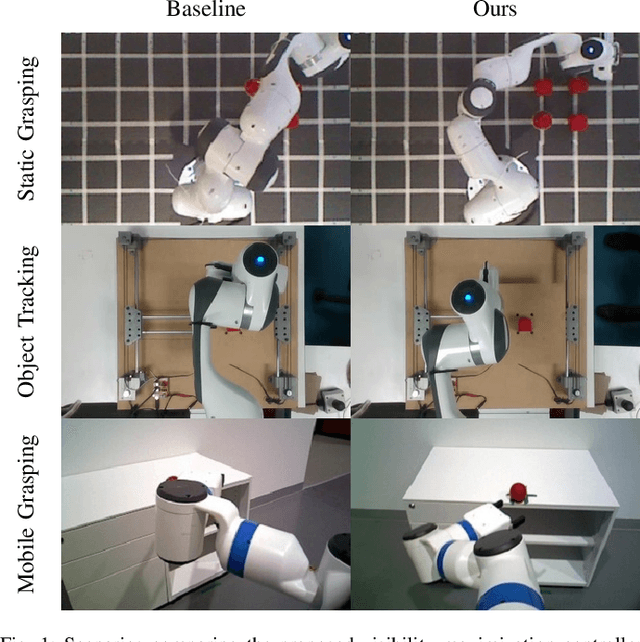
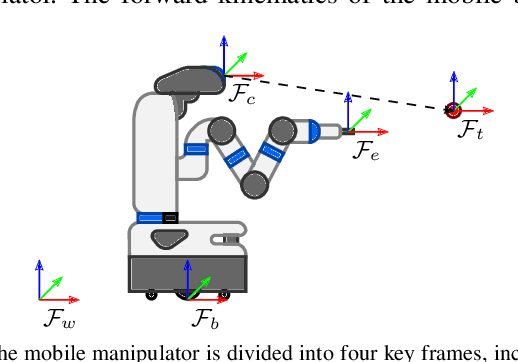
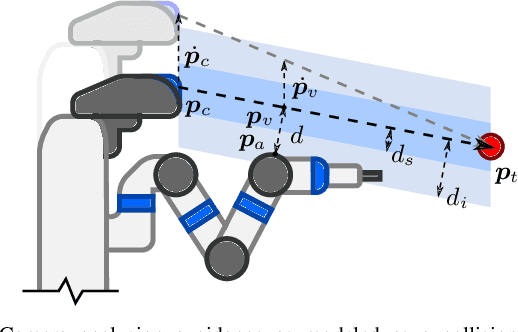
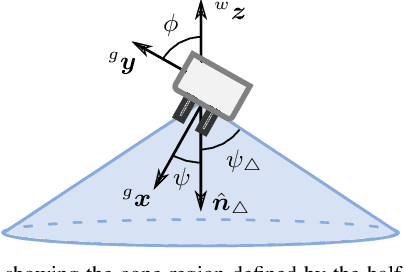
Occlusions caused by a robot's own body is a common problem for closed-loop control methods employed in eye-to-hand camera setups. We propose an optimization-based reactive controller that minimizes self-occlusions while achieving a desired goal pose. The approach allows coordinated control between the robot's base, arm and head by encoding the line-of-sight visibility to the target as a soft constraint along with other task-related constraints, and solving for feasible joint and base velocities. The generalizability of the approach is demonstrated in simulated and real-world experiments, on robots with fixed or mobile bases, with moving or fixed objects, and multiple objects. The experiments revealed a trade-off between occlusion rates and other task metrics. While a planning-based baseline achieved lower occlusion rates than the proposed controller, it came at the expense of highly inefficient paths and a significant drop in the task success. On the other hand, the proposed controller is shown to improve visibility to the line target object(s) without sacrificing too much from the task success and efficiency. Videos and code can be found at: rhys-newbury.github.io/projects/vmc/.
An Experimental Validation and Comparison of Reaching Motion Models for Unconstrained Handovers: Towards Generating Humanlike Motions for Human-Robot Handovers
Aug 29, 2021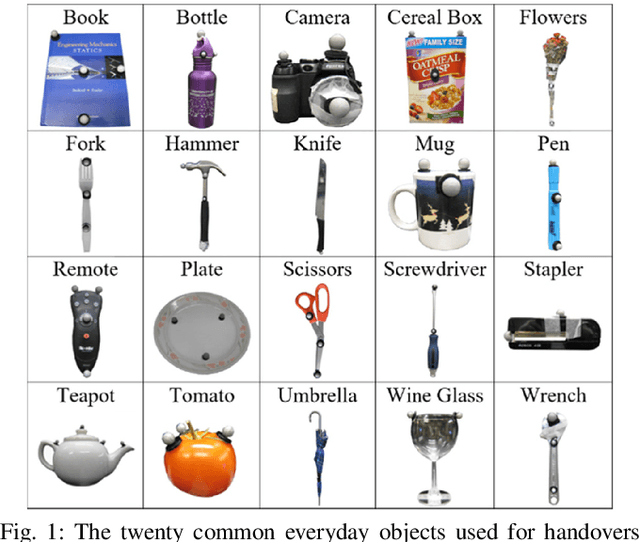
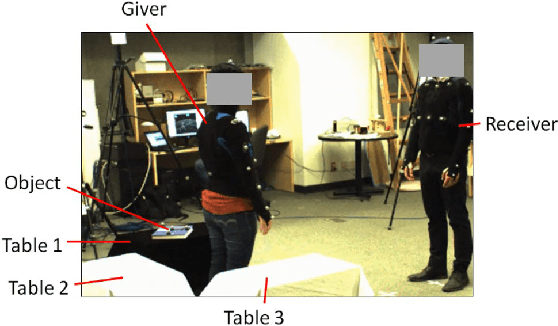
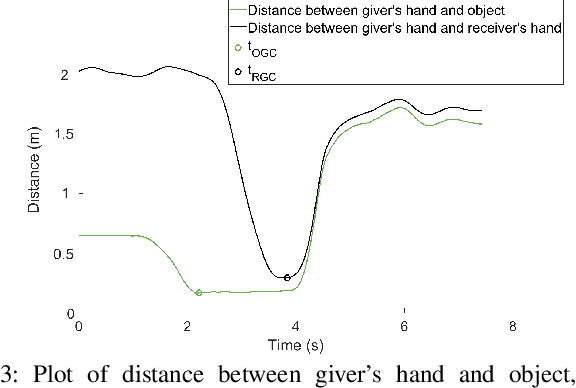
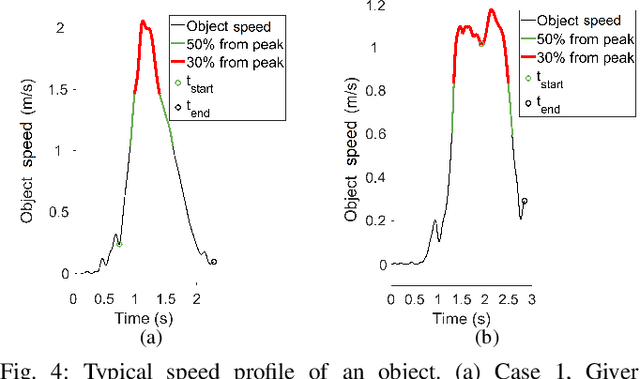
The Minimum Jerk motion model has long been cited in literature for human point-to-point reaching motions in single-person tasks. While it has been demonstrated that applying minimum-jerk-like trajectories to robot reaching motions in the joint action task of human-robot handovers allows a robot giver to be perceived as more careful, safe, and skilled, it has not been verified whether human reaching motions in handovers follow the Minimum Jerk model. To experimentally test and verify motion models for human reaches in handovers, we examined human reaching motions in unconstrained handovers (where the person is allowed to move their whole body) and fitted against 1) the Minimum Jerk model, 2) its variation, the Decoupled Minimum Jerk model, and 3) the recently proposed Elliptical (Conic) model. Results showed that Conic model fits unconstrained human handover reaching motions best. Furthermore, we discovered that unlike constrained, single-person reaching motions, which have been found to be elliptical, there is a split between elliptical and hyperbolic conic types. We expect our results will help guide generation of more humanlike reaching motions for human-robot handover tasks.
Demonstrating Cloth Folding to Robots: Design and Evaluation of a 2D and a 3D User Interface
Apr 07, 2021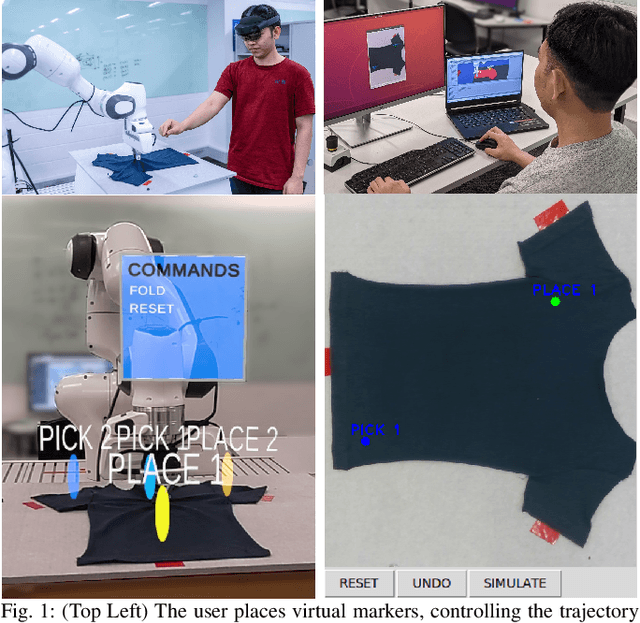
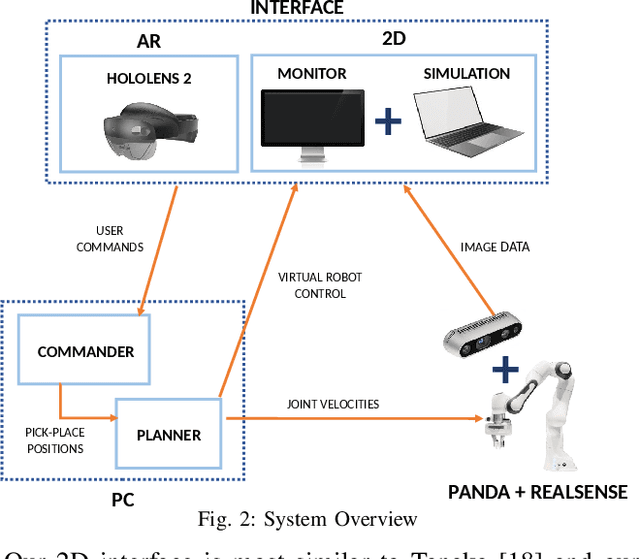
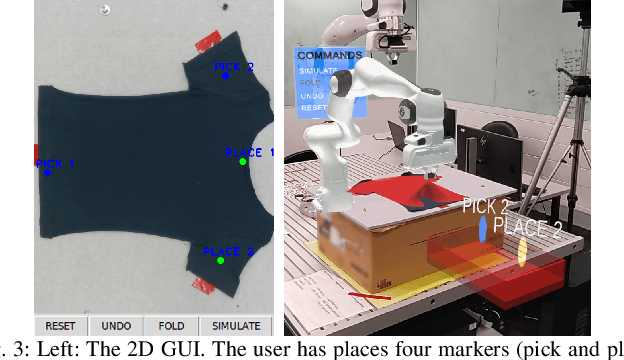
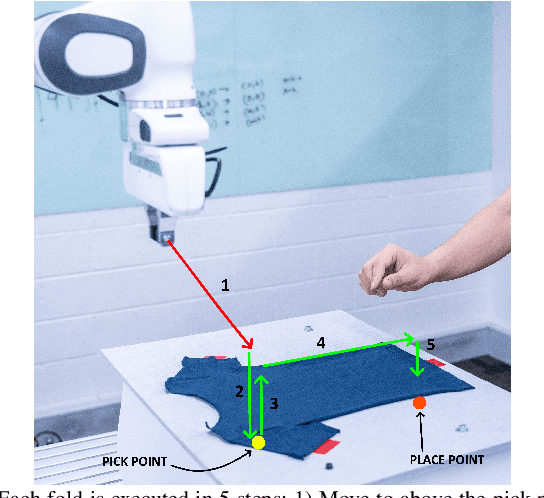
An appropriate user interface to collect human demonstration data for deformable object manipulation has been mostly overlooked in the literature. We present an interaction design for demonstrating cloth folding to robots. Users choose pick and place points on the cloth and can preview a visualization of a simulated cloth before real-robot execution. Two interfaces are proposed: A 2D display-and-mouse interface where points are placed by clicking on an image of the cloth, and a 3D Augmented Reality interface where the chosen points are placed by hand gestures. We conduct a user study with 18 participants, in which each user completed two sequential folds to achieve a cloth goal shape. Results show that while both interfaces were acceptable, the 3D interface was found to be more suitable for understanding the task, and the 2D interface suitable for repetition. Results also found that fold previews improve three key metrics: task efficiency, the ability to predict the final shape of the cloth and overall user satisfaction.