 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGFSR: Geometric Fidelity and Spatial Refinement for Reliable Lane Detection
May 26, 2026Lane detection stands as a crucial perception task in autonomous driving and advanced driver assistance systems. However, existing methods still degrade in complex real scenarios due to two major limitations. First, classification confidence only characterizes the categorical existence of lane priors and has no strong correlation with geometric quality. If threshold filtering and NMS are conducted merely based on this confidence, the model tends to retain lane priors with high confidence while eliminating those with lower confidence but superior geometric representation. Secondly, the regression modules in existing methods weaken correlations among sampling points, hindering fine-grained optimization of distant, high-curvature and complex-topology lanes and causing underfitting. To address these issues, we propose Geometric Fidelity and Spatial Refinement (GFSR), a framework consisting of LaneIoU-guided Confidence Calibration (LCC) and Adaptive Gated Location Refinement (AGLR). Specifically, LCC adopts LaneIoU as soft supervision to explicitly estimate the geometric fidelity of lane priors, which is further fused with classification confidence to construct the Collaborative Reliability Index (CRI). This index guides lane prior filtering, effectively retaining those with high classification confidence and favorable geometric quality. Meanwhile, cooperating with regression heads in each refinement stage, AGLR predicts sampling point lateral offsets and adopts a gating mechanism to adaptively regulate correction magnitude, strengthen inter-point correlations and boost model adaptability as well as robustness toward complex lane scenarios. Extensive experiments on CULane and CurveLanes demonstrate that our GFSR achieves state-of-the-art performance on CULane, with F1_50 and F1_75 scores of 81.46% and 65.01%, and reaches 87.35% F1_50 on CurveLanes.
Arcane: An Assertion Reduction Framework through Semantic Clustering and MCTS-Guided Rule Exploring
May 11, 2026Assertion-based Verification (ABV) is essential for ensuring that hardware designs conform to their intended specifications. However, existing automated assertion-generation approaches, such as LLM-based frameworks, often generate large numbers of redundant assertions, which significantly degrade simulation efficiency. To mitigate the simulation overhead caused by redundant assertions, this paper proposes Arcane, an efficient assertion reduction framework. It integrates a two-tier assertion clustering approach for accurate semantic classification of large assertion sets, and employs Monte Carlo Tree Search (MCTS) to explore optimal rule-application sequences for efficient assertion reduction. The experimental results on Assertionbench [20] show that Arcane achieves a reduction of up to 76.2% in the assertion count while fully preserving formal coverage and mutation-detection ability. Further simulation studies demonstrate a speedup of 2.6x to 6.1x speedup in simulation time. The proposed framework is released at https://anonymous.4open.science/r/Arcane1-0A6F/.
AI Assisted Economics Measurement From Survey: Evidence from Public Employee Pension Choice
Feb 02, 2026We develop an iterative framework for economic measurement that leverages large language models to extract measurement structure directly from survey instruments. The approach maps survey items to a sparse distribution over latent constructs through what we term a soft mapping, aggregates harmonized responses into respondent level sub dimension scores, and disciplines the resulting taxonomy through out of sample incremental validity tests and discriminant validity diagnostics. The framework explicitly integrates iteration into the measurement construction process. Overlap and redundancy diagnostics trigger targeted taxonomy refinement and constrained remapping, ensuring that added measurement flexibility is retained only when it delivers stable out of sample performance gains. Applied to a large scale public employee retirement plan survey, the framework identifies which semantic components contain behavioral signal and clarifies the economic mechanisms, such as beliefs versus constraints, that matter for retirement choices. The methodology provides a portable measurement audit of survey instruments that can guide both empirical analysis and survey design.
SoccerNet 2025 Challenges Results
Aug 26, 2025The SoccerNet 2025 Challenges mark the fifth annual edition of the SoccerNet open benchmarking effort, dedicated to advancing computer vision research in football video understanding. This year's challenges span four vision-based tasks: (1) Team Ball Action Spotting, focused on detecting ball-related actions in football broadcasts and assigning actions to teams; (2) Monocular Depth Estimation, targeting the recovery of scene geometry from single-camera broadcast clips through relative depth estimation for each pixel; (3) Multi-View Foul Recognition, requiring the analysis of multiple synchronized camera views to classify fouls and their severity; and (4) Game State Reconstruction, aimed at localizing and identifying all players from a broadcast video to reconstruct the game state on a 2D top-view of the field. Across all tasks, participants were provided with large-scale annotated datasets, unified evaluation protocols, and strong baselines as starting points. This report presents the results of each challenge, highlights the top-performing solutions, and provides insights into the progress made by the community. The SoccerNet Challenges continue to serve as a driving force for reproducible, open research at the intersection of computer vision, artificial intelligence, and sports. Detailed information about the tasks, challenges, and leaderboards can be found at https://www.soccer-net.org, with baselines and development kits available at https://github.com/SoccerNet.
Safety2Drive: Safety-Critical Scenario Benchmark for the Evaluation of Autonomous Driving
May 20, 2025



Autonomous Driving (AD) systems demand the high levels of safety assurance. Despite significant advancements in AD demonstrated on open-source benchmarks like Longest6 and Bench2Drive, existing datasets still lack regulatory-compliant scenario libraries for closed-loop testing to comprehensively evaluate the functional safety of AD. Meanwhile, real-world AD accidents are underrepresented in current driving datasets. This scarcity leads to inadequate evaluation of AD performance, posing risks to safety validation and practical deployment. To address these challenges, we propose Safety2Drive, a safety-critical scenario library designed to evaluate AD systems. Safety2Drive offers three key contributions. (1) Safety2Drive comprehensively covers the test items required by standard regulations and contains 70 AD function test items. (2) Safety2Drive supports the safety-critical scenario generalization. It has the ability to inject safety threats such as natural environment corruptions and adversarial attacks cross camera and LiDAR sensors. (3) Safety2Drive supports multi-dimensional evaluation. In addition to the evaluation of AD systems, it also supports the evaluation of various perception tasks, such as object detection and lane detection. Safety2Drive provides a paradigm from scenario construction to validation, establishing a standardized test framework for the safe deployment of AD.
Recurrent Bilinear Optimization for Binary Neural Networks
Sep 04, 2022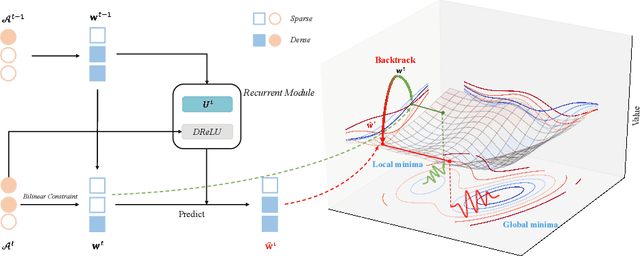
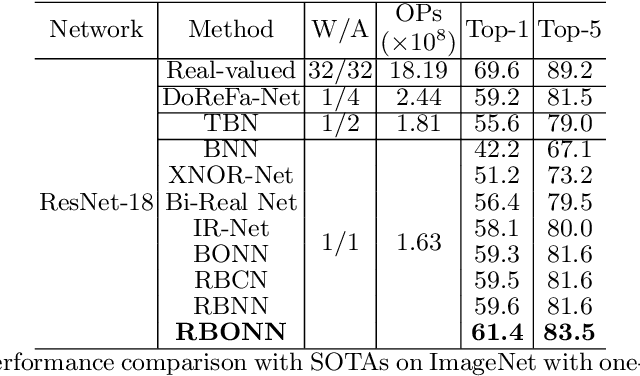

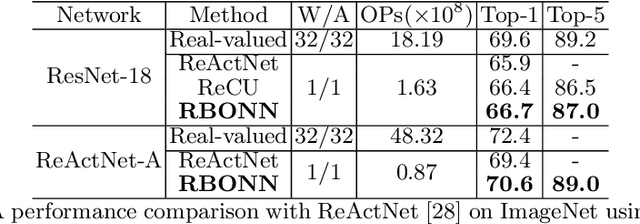
Binary Neural Networks (BNNs) show great promise for real-world embedded devices. As one of the critical steps to achieve a powerful BNN, the scale factor calculation plays an essential role in reducing the performance gap to their real-valued counterparts. However, existing BNNs neglect the intrinsic bilinear relationship of real-valued weights and scale factors, resulting in a sub-optimal model caused by an insufficient training process. To address this issue, Recurrent Bilinear Optimization is proposed to improve the learning process of BNNs (RBONNs) by associating the intrinsic bilinear variables in the back propagation process. Our work is the first attempt to optimize BNNs from the bilinear perspective. Specifically, we employ a recurrent optimization and Density-ReLU to sequentially backtrack the sparse real-valued weight filters, which will be sufficiently trained and reach their performance limits based on a controllable learning process. We obtain robust RBONNs, which show impressive performance over state-of-the-art BNNs on various models and datasets. Particularly, on the task of object detection, RBONNs have great generalization performance. Our code is open-sourced on https://github.com/SteveTsui/RBONN .