 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNanoNet: Parameter-Efficient Learning with Label-Scarce Supervision for Lightweight Text Mining Model
Feb 05, 2026The lightweight semi-supervised learning (LSL) strategy provides an effective approach of conserving labeled samples and minimizing model inference costs. Prior research has effectively applied knowledge transfer learning and co-training regularization from large to small models in LSL. However, such training strategies are computationally intensive and prone to local optima, thereby increasing the difficulty of finding the optimal solution. This has prompted us to investigate the feasibility of integrating three low-cost scenarios for text mining tasks: limited labeled supervision, lightweight fine-tuning, and rapid-inference small models. We propose NanoNet, a novel framework for lightweight text mining that implements parameter-efficient learning with limited supervision. It employs online knowledge distillation to generate multiple small models and enhances their performance through mutual learning regularization. The entire process leverages parameter-efficient learning, reducing training costs and minimizing supervision requirements, ultimately yielding a lightweight model for downstream inference.
Scoring, Reasoning, and Selecting the Best! Ensembling Large Language Models via a Peer-Review Process
Dec 29, 2025We propose LLM-PeerReview, an unsupervised LLM Ensemble method that selects the most ideal response from multiple LLM-generated candidates for each query, harnessing the collective wisdom of multiple models with diverse strengths. LLM-PeerReview is built on a novel, peer-review-inspired framework that offers a clear and interpretable mechanism, while remaining fully unsupervised for flexible adaptability and generalization. Specifically, it operates in three stages: For scoring, we use the emerging LLM-as-a-Judge technique to evaluate each response by reusing multiple LLMs at hand; For reasoning, we can apply a principled graphical model-based truth inference algorithm or a straightforward averaging strategy to aggregate multiple scores to produce a final score for each response; Finally, the highest-scoring response is selected as the best ensemble output. LLM-PeerReview is conceptually simple and empirically powerful. The two variants of the proposed approach obtain strong results across four datasets, including outperforming the recent advanced model Smoothie-Global by 6.9% and 7.3% points, respectively.
OBJVanish: Physically Realizable Text-to-3D Adv. Generation of LiDAR-Invisible Objects
Oct 08, 2025LiDAR-based 3D object detectors are fundamental to autonomous driving, where failing to detect objects poses severe safety risks. Developing effective 3D adversarial attacks is essential for thoroughly testing these detection systems and exposing their vulnerabilities before real-world deployment. However, existing adversarial attacks that add optimized perturbations to 3D points have two critical limitations: they rarely cause complete object disappearance and prove difficult to implement in physical environments. We introduce the text-to-3D adversarial generation method, a novel approach enabling physically realizable attacks that can generate 3D models of objects truly invisible to LiDAR detectors and be easily realized in the real world. Specifically, we present the first empirical study that systematically investigates the factors influencing detection vulnerability by manipulating the topology, connectivity, and intensity of individual pedestrian 3D models and combining pedestrians with multiple objects within the CARLA simulation environment. Building on the insights, we propose the physically-informed text-to-3D adversarial generation (Phy3DAdvGen) that systematically optimizes text prompts by iteratively refining verbs, objects, and poses to produce LiDAR-invisible pedestrians. To ensure physical realizability, we construct a comprehensive object pool containing 13 3D models of real objects and constrain Phy3DAdvGen to generate 3D objects based on combinations of objects in this set. Extensive experiments demonstrate that our approach can generate 3D pedestrians that evade six state-of-the-art (SOTA) LiDAR 3D detectors in both CARLA simulation and physical environments, thereby highlighting vulnerabilities in safety-critical applications.
Safety2Drive: Safety-Critical Scenario Benchmark for the Evaluation of Autonomous Driving
May 20, 2025



Autonomous Driving (AD) systems demand the high levels of safety assurance. Despite significant advancements in AD demonstrated on open-source benchmarks like Longest6 and Bench2Drive, existing datasets still lack regulatory-compliant scenario libraries for closed-loop testing to comprehensively evaluate the functional safety of AD. Meanwhile, real-world AD accidents are underrepresented in current driving datasets. This scarcity leads to inadequate evaluation of AD performance, posing risks to safety validation and practical deployment. To address these challenges, we propose Safety2Drive, a safety-critical scenario library designed to evaluate AD systems. Safety2Drive offers three key contributions. (1) Safety2Drive comprehensively covers the test items required by standard regulations and contains 70 AD function test items. (2) Safety2Drive supports the safety-critical scenario generalization. It has the ability to inject safety threats such as natural environment corruptions and adversarial attacks cross camera and LiDAR sensors. (3) Safety2Drive supports multi-dimensional evaluation. In addition to the evaluation of AD systems, it also supports the evaluation of various perception tasks, such as object detection and lane detection. Safety2Drive provides a paradigm from scenario construction to validation, establishing a standardized test framework for the safe deployment of AD.
Towards Benchmarking and Assessing the Safety and Robustness of Autonomous Driving on Safety-critical Scenarios
Mar 31, 2025



Autonomous driving has made significant progress in both academia and industry, including performance improvements in perception task and the development of end-to-end autonomous driving systems. However, the safety and robustness assessment of autonomous driving has not received sufficient attention. Current evaluations of autonomous driving are typically conducted in natural driving scenarios. However, many accidents often occur in edge cases, also known as safety-critical scenarios. These safety-critical scenarios are difficult to collect, and there is currently no clear definition of what constitutes a safety-critical scenario. In this work, we explore the safety and robustness of autonomous driving in safety-critical scenarios. First, we provide a definition of safety-critical scenarios, including static traffic scenarios such as adversarial attack scenarios and natural distribution shifts, as well as dynamic traffic scenarios such as accident scenarios. Then, we develop an autonomous driving safety testing platform to comprehensively evaluate autonomous driving systems, encompassing not only the assessment of perception modules but also system-level evaluations. Our work systematically constructs a safety verification process for autonomous driving, providing technical support for the industry to establish standardized test framework and reduce risks in real-world road deployment.
Harnessing Multiple Large Language Models: A Survey on LLM Ensemble
Feb 25, 2025



LLM Ensemble -- which involves the comprehensive use of multiple large language models (LLMs), each aimed at handling user queries during downstream inference, to benefit from their individual strengths -- has gained substantial attention recently. The widespread availability of LLMs, coupled with their varying strengths and out-of-the-box usability, has profoundly advanced the field of LLM Ensemble. This paper presents the first systematic review of recent developments in LLM Ensemble. First, we introduce our taxonomy of LLM Ensemble and discuss several related research problems. Then, we provide a more in-depth classification of the methods under the broad categories of "ensemble-before-inference, ensemble-during-inference, ensemble-after-inference", and review all relevant methods. Finally, we introduce related benchmarks and applications, summarize existing studies, and suggest several future research directions. A curated list of papers on LLM Ensemble is available at https://github.com/junchenzhi/Awesome-LLM-Ensemble.
Learning from Multiple Annotators by Incorporating Instance Features
Jun 29, 2021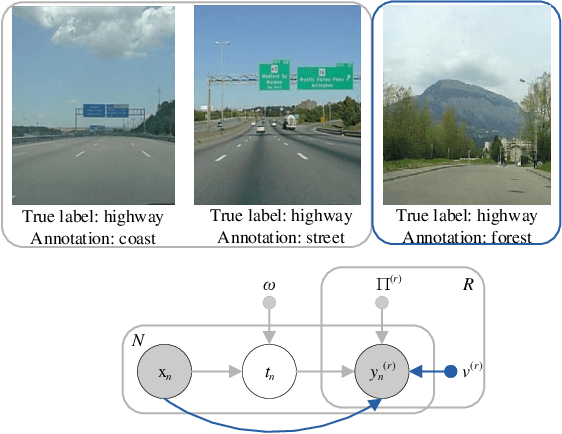
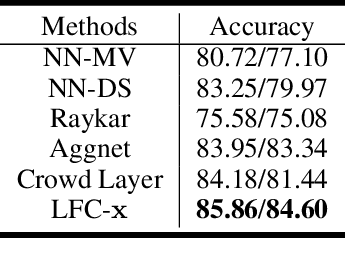
Learning from multiple annotators aims to induce a high-quality classifier from training instances, where each of them is associated with a set of possibly noisy labels provided by multiple annotators under the influence of their varying abilities and own biases. In modeling the probability transition process from latent true labels to observed labels, most existing methods adopt class-level confusion matrices of annotators that observed labels do not depend on the instance features, just determined by the true labels. It may limit the performance that the classifier can achieve. In this work, we propose the noise transition matrix, which incorporates the influence of instance features on annotators' performance based on confusion matrices. Furthermore, we propose a simple yet effective learning framework, which consists of a classifier module and a noise transition matrix module in a unified neural network architecture. Experimental results demonstrate the superiority of our method in comparison with state-of-the-art methods.