 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Can We Synthesize High-Quality Pretraining Data? A Systematic Study of Prompt Design, Generator Model, and Source Data
Apr 15, 2026Synthetic data is a standard component in training large language models, yet systematic comparisons across design dimensions, including rephrasing strategy, generator model, and source data, remain absent. We conduct extensive controlled experiments, generating over one trillion tokens, to identify critical factors in rephrasing web text into synthetic pretraining data. Our results reveal that structured output formats, such as tables, math problems, FAQs, and tutorials, consistently outperform both curated web baselines and prior synthetic methods. Notably, increasing the size of the generator model beyond 1B parameters provides no additional benefit. Our analysis also demonstrates that the selection of the original data used for mixing substantially influences performance. By applying our findings, we develop \textbf{\textsc{FinePhrase}}, a 486-billion-token open dataset of rephrased web text. We show that \textsc{FinePhrase} outperforms all existing synthetic data baselines while reducing generation costs by up to 30 times. We provide the dataset, all prompts, and the generation framework to the research community.
The Sustainability Gap in Robotics: A Large-Scale Survey of Sustainability Awareness in 50,000 Research Articles
Apr 09, 2026We present a large-scale survey of sustainability communication and motivation in robotics research. Our analysis covers nearly 50,000 open-access papers from arXiv's cs.RO category published between 2015 and early 2026. In this study, we quantify how often papers mention social, ecological, and sustainability impacts, and we analyse their alignment with the UN Sustainable Development Goals (SDGs). The results reveal a persistent gap between the field's potential and its stated intent. While a large fraction of robotics papers can be mapped to SDG-relevant domains, explicit sustainability motivation remains remarkably low. Specifically, mentions of sustainability-related impacts are typically below 2%, explicit SDG references stay below 0.1%, and the proportion of sustainability-motivated papers remains below 5%. These trends suggest that while the field of robotics is advancing rapidly, sustainability is not yet a standard part of research framing. We conclude by proposing concrete actions for researchers, conferences, and institutions to close these awareness and motivation gaps, supporting a shift toward more intentional and responsible innovation.
LeRobot: An Open-Source Library for End-to-End Robot Learning
Feb 26, 2026Robotics is undergoing a significant transformation powered by advances in high-level control techniques based on machine learning, giving rise to the field of robot learning. Recent progress in robot learning has been accelerated by the increasing availability of affordable teleoperation systems, large-scale openly available datasets, and scalable learning-based methods. However, development in the field of robot learning is often slowed by fragmented, closed-source tools designed to only address specific sub-components within the robotics stack. In this paper, we present \texttt{lerobot}, an open-source library that integrates across the entire robot learning stack, from low-level middleware communication for motor controls to large-scale dataset collection, storage and streaming. The library is designed with a strong focus on real-world robotics, supporting accessible hardware platforms while remaining extensible to new embodiments. It also supports efficient implementations for various state-of-the-art robot learning algorithms from multiple prominent paradigms, as well as a generalized asynchronous inference stack. Unlike traditional pipelines which heavily rely on hand-crafted techniques, \texttt{lerobot} emphasizes scalable learning approaches that improve directly with more data and compute. Designed for accessibility, scalability, and openness, \texttt{lerobot} lowers the barrier to entry for researchers and practitioners to robotics while providing a platform for reproducible, state-of-the-art robot learning.
Robot Learning: A Tutorial
Oct 14, 2025



Robot learning is at an inflection point, driven by rapid advancements in machine learning and the growing availability of large-scale robotics data. This shift from classical, model-based methods to data-driven, learning-based paradigms is unlocking unprecedented capabilities in autonomous systems. This tutorial navigates the landscape of modern robot learning, charting a course from the foundational principles of Reinforcement Learning and Behavioral Cloning to generalist, language-conditioned models capable of operating across diverse tasks and even robot embodiments. This work is intended as a guide for researchers and practitioners, and our goal is to equip the reader with the conceptual understanding and practical tools necessary to contribute to developments in robot learning, with ready-to-use examples implemented in $\texttt{lerobot}$.
FineWeb2: One Pipeline to Scale Them All -- Adapting Pre-Training Data Processing to Every Language
Jun 26, 2025Pre-training state-of-the-art large language models (LLMs) requires vast amounts of clean and diverse text data. While the open development of large high-quality English pre-training datasets has seen substantial recent progress, training performant multilingual LLMs remains a challenge, in large part due to the inherent difficulty of tailoring filtering and deduplication pipelines to a large number of languages. In this work, we introduce a new pre-training dataset curation pipeline based on FineWeb that can be automatically adapted to support any language. We extensively ablate our pipeline design choices on a set of nine diverse languages, guided by a set of meaningful and informative evaluation tasks that were chosen through a novel selection process based on measurable criteria. Ultimately, we show that our pipeline can be used to create non-English corpora that produce more performant models than prior datasets. We additionally introduce a straightforward and principled approach to rebalance datasets that takes into consideration both duplication count and quality, providing an additional performance uplift. Finally, we scale our pipeline to over 1000 languages using almost 100 Common Crawl snapshots to produce FineWeb2, a new 20 terabyte (5 billion document) multilingual dataset which we release along with our pipeline, training, and evaluation codebases.
SmolVLM: Redefining small and efficient multimodal models
Apr 07, 2025



Large Vision-Language Models (VLMs) deliver exceptional performance but require significant computational resources, limiting their deployment on mobile and edge devices. Smaller VLMs typically mirror design choices of larger models, such as extensive image tokenization, leading to inefficient GPU memory usage and constrained practicality for on-device applications. We introduce SmolVLM, a series of compact multimodal models specifically engineered for resource-efficient inference. We systematically explore architectural configurations, tokenization strategies, and data curation optimized for low computational overhead. Through this, we identify key design choices that yield substantial performance gains on image and video tasks with minimal memory footprints. Our smallest model, SmolVLM-256M, uses less than 1GB GPU memory during inference and outperforms the 300-times larger Idefics-80B model, despite an 18-month development gap. Our largest model, at 2.2B parameters, rivals state-of-the-art VLMs consuming twice the GPU memory. SmolVLM models extend beyond static images, demonstrating robust video comprehension capabilities. Our results emphasize that strategic architectural optimizations, aggressive yet efficient tokenization, and carefully curated training data significantly enhance multimodal performance, facilitating practical, energy-efficient deployments at significantly smaller scales.
YourBench: Easy Custom Evaluation Sets for Everyone
Apr 02, 2025



Evaluating large language models (LLMs) effectively remains a critical bottleneck, as traditional static benchmarks suffer from saturation and contamination, while human evaluations are costly and slow. This hinders timely or domain-specific assessment, crucial for real-world applications. We introduce YourBench, a novel, open-source framework that addresses these limitations by enabling dynamic, automated generation of reliable, up-to-date, and domain-tailored benchmarks cheaply and without manual annotation, directly from user-provided documents. We demonstrate its efficacy by replicating 7 diverse MMLU subsets using minimal source text, achieving this for under 15 USD in total inference costs while perfectly preserving the relative model performance rankings (Spearman Rho = 1) observed on the original benchmark. To ensure that YourBench generates data grounded in provided input instead of relying on posterior parametric knowledge in models, we also introduce Tempora-0325, a novel dataset of over 7K diverse documents, published exclusively after March 2025. Our comprehensive analysis spans 26 SoTA models from 7 major families across varying scales (3-671B parameters) to validate the quality of generated evaluations through rigorous algorithmic checks (e.g., citation grounding) and human assessments. We release the YourBench library, the Tempora-0325 dataset, 150k+ question answer pairs based on Tempora and all evaluation and inference traces to facilitate reproducible research and empower the community to generate bespoke benchmarks on demand, fostering more relevant and trustworthy LLM evaluation.
SmolLM2: When Smol Goes Big -- Data-Centric Training of a Small Language Model
Feb 04, 2025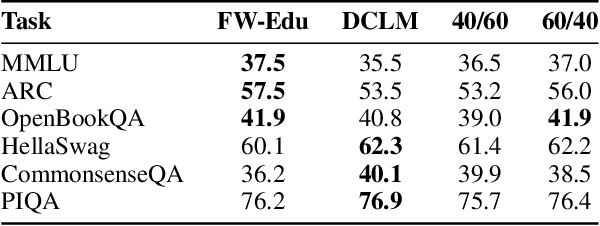

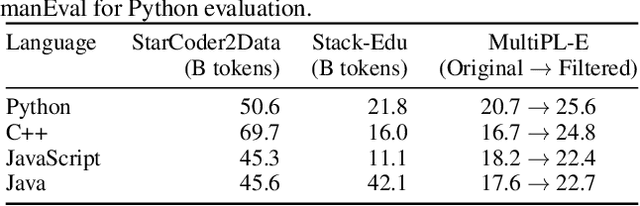

While large language models have facilitated breakthroughs in many applications of artificial intelligence, their inherent largeness makes them computationally expensive and challenging to deploy in resource-constrained settings. In this paper, we document the development of SmolLM2, a state-of-the-art "small" (1.7 billion parameter) language model (LM). To attain strong performance, we overtrain SmolLM2 on ~11 trillion tokens of data using a multi-stage training process that mixes web text with specialized math, code, and instruction-following data. We additionally introduce new specialized datasets (FineMath, Stack-Edu, and SmolTalk) at stages where we found existing datasets to be problematically small or low-quality. To inform our design decisions, we perform both small-scale ablations as well as a manual refinement process that updates the dataset mixing rates at each stage based on the performance at the previous stage. Ultimately, we demonstrate that SmolLM2 outperforms other recent small LMs including Qwen2.5-1.5B and Llama3.2-1B. To facilitate future research on LM development as well as applications of small LMs, we release both SmolLM2 as well as all of the datasets we prepared in the course of this project.
Towards Best Practices for Open Datasets for LLM Training
Jan 14, 2025Many AI companies are training their large language models (LLMs) on data without the permission of the copyright owners. The permissibility of doing so varies by jurisdiction: in countries like the EU and Japan, this is allowed under certain restrictions, while in the United States, the legal landscape is more ambiguous. Regardless of the legal status, concerns from creative producers have led to several high-profile copyright lawsuits, and the threat of litigation is commonly cited as a reason for the recent trend towards minimizing the information shared about training datasets by both corporate and public interest actors. This trend in limiting data information causes harm by hindering transparency, accountability, and innovation in the broader ecosystem by denying researchers, auditors, and impacted individuals access to the information needed to understand AI models. While this could be mitigated by training language models on open access and public domain data, at the time of writing, there are no such models (trained at a meaningful scale) due to the substantial technical and sociological challenges in assembling the necessary corpus. These challenges include incomplete and unreliable metadata, the cost and complexity of digitizing physical records, and the diverse set of legal and technical skills required to ensure relevance and responsibility in a quickly changing landscape. Building towards a future where AI systems can be trained on openly licensed data that is responsibly curated and governed requires collaboration across legal, technical, and policy domains, along with investments in metadata standards, digitization, and fostering a culture of openness.
The FineWeb Datasets: Decanting the Web for the Finest Text Data at Scale
Jun 25, 2024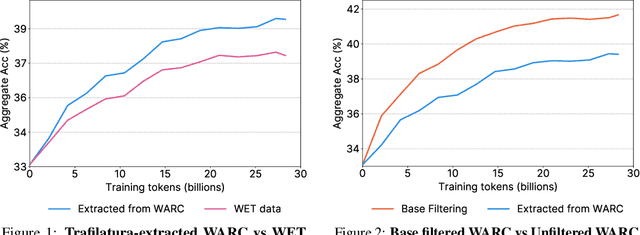
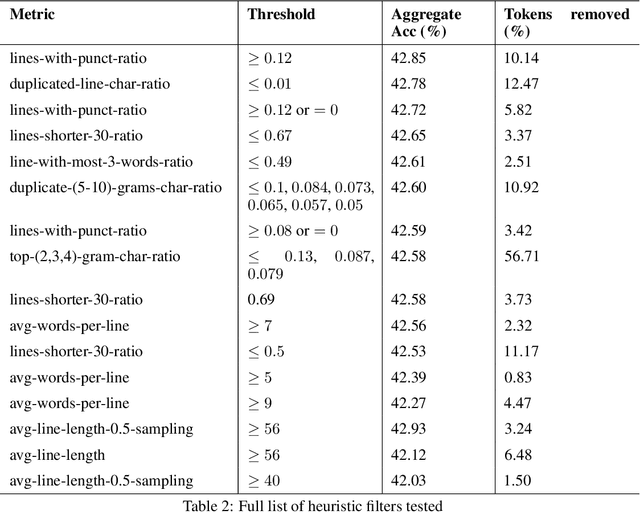
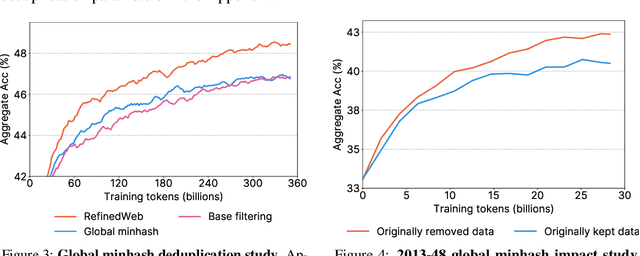
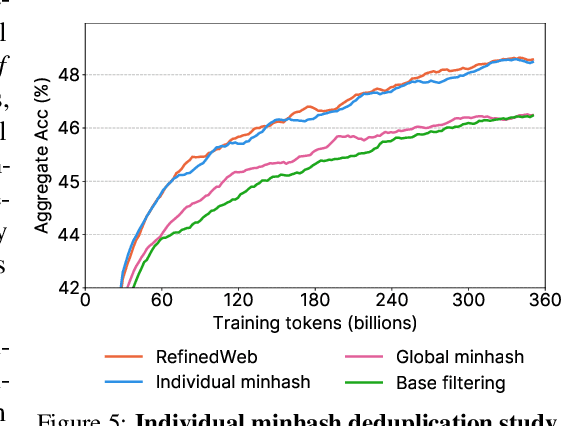
The performance of a large language model (LLM) depends heavily on the quality and size of its pretraining dataset. However, the pretraining datasets for state-of-the-art open LLMs like Llama 3 and Mixtral are not publicly available and very little is known about how they were created. In this work, we introduce FineWeb, a 15-trillion token dataset derived from 96 Common Crawl snapshots that produces better-performing LLMs than other open pretraining datasets. To advance the understanding of how best to curate high-quality pretraining datasets, we carefully document and ablate all of the design choices used in FineWeb, including in-depth investigations of deduplication and filtering strategies. In addition, we introduce FineWeb-Edu, a 1.3-trillion token collection of educational text filtered from FineWeb. LLMs pretrained on FineWeb-Edu exhibit dramatically better performance on knowledge- and reasoning-intensive benchmarks like MMLU and ARC. Along with our datasets, we publicly release our data curation codebase and all of the models trained during our ablation experiments.