 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Model Powered Intelligent Urban Agents: Concepts, Capabilities, and Applications
Jul 01, 2025The long-standing vision of intelligent cities is to create efficient, livable, and sustainable urban environments using big data and artificial intelligence technologies. Recently, the advent of Large Language Models (LLMs) has opened new ways toward realizing this vision. With powerful semantic understanding and reasoning capabilities, LLMs can be deployed as intelligent agents capable of autonomously solving complex problems across domains. In this article, we focus on Urban LLM Agents, which are LLM-powered agents that are semi-embodied within the hybrid cyber-physical-social space of cities and used for system-level urban decision-making. First, we introduce the concept of urban LLM agents, discussing their unique capabilities and features. Second, we survey the current research landscape from the perspective of agent workflows, encompassing urban sensing, memory management, reasoning, execution, and learning. Third, we categorize the application domains of urban LLM agents into five groups: urban planning, transportation, environment, public safety, and urban society, presenting representative works in each group. Finally, we discuss trustworthiness and evaluation issues that are critical for real-world deployment, and identify several open problems for future research. This survey aims to establish a foundation for the emerging field of urban LLM agents and to provide a roadmap for advancing the intersection of LLMs and urban intelligence. A curated list of relevant papers and open-source resources is maintained and continuously updated at https://github.com/usail-hkust/Awesome-Urban-LLM-Agents.
Physics-Informed Teleconnection-Aware Transformer for Global Subseasonal-to-Seasonal Forecasting
Jun 11, 2025Subseasonal-to-seasonal (S2S) forecasting, which predicts climate conditions from several weeks to months in advance, presents significant challenges due to the chaotic dynamics of atmospheric systems and complex interactions across multiple scales. Current approaches often fail to explicitly model underlying physical processes and teleconnections that are crucial at S2S timescales. We introduce TelePiT, a novel deep learning architecture that enhances global S2S forecasting through integrated multi-scale physics and teleconnection awareness. Our approach consists of three key components: (1) Spherical Harmonic Embedding, which accurately encodes global atmospheric variables onto spherical geometry; (2) Multi-Scale Physics-Informed Neural ODE, which explicitly captures atmospheric physical processes across multiple learnable frequency bands; (3) Teleconnection-Aware Transformer, which models critical global climate interactions through tactfully injecting teleconnection patterns into the self-attention. Extensive experiments demonstrate that TelePiT significantly outperforms state-of-the-art data-driven baselines and operational numerical weather prediction systems, with remarkable improvements for atmospheric variables including a 57.7% reduction in RMSE for 2-meter temperature compared to previous best models.
LLM-ODDR: A Large Language Model Framework for Joint Order Dispatching and Driver Repositioning
May 28, 2025Ride-hailing platforms face significant challenges in optimizing order dispatching and driver repositioning operations in dynamic urban environments. Traditional approaches based on combinatorial optimization, rule-based heuristics, and reinforcement learning often overlook driver income fairness, interpretability, and adaptability to real-world dynamics. To address these gaps, we propose LLM-ODDR, a novel framework leveraging Large Language Models (LLMs) for joint Order Dispatching and Driver Repositioning (ODDR) in ride-hailing services. LLM-ODDR framework comprises three key components: (1) Multi-objective-guided Order Value Refinement, which evaluates orders by considering multiple objectives to determine their overall value; (2) Fairness-aware Order Dispatching, which balances platform revenue with driver income fairness; and (3) Spatiotemporal Demand-Aware Driver Repositioning, which optimizes idle vehicle placement based on historical patterns and projected supply. We also develop JointDR-GPT, a fine-tuned model optimized for ODDR tasks with domain knowledge. Extensive experiments on real-world datasets from Manhattan taxi operations demonstrate that our framework significantly outperforms traditional methods in terms of effectiveness, adaptability to anomalous conditions, and decision interpretability. To our knowledge, this is the first exploration of LLMs as decision-making agents in ride-hailing ODDR tasks, establishing foundational insights for integrating advanced language models within intelligent transportation systems.
A Prompt-Guided Spatio-Temporal Transformer Model for National-Wide Nuclear Radiation Forecasting
Oct 15, 2024



Nuclear radiation (NR), which refers to the energy emitted from atomic nuclei during decay, poses substantial risks to human health and environmental safety. Accurate forecasting of nuclear radiation levels is crucial for informed decision-making by both individuals and governments. However, this task is challenging due to the imbalanced distribution of monitoring stations over a wide spatial range and the non-stationary radiation variation patterns. In this study, we introduce NRFormer, an innovative framework tailored for national-wide prediction of nuclear radiation variations. By integrating a non-stationary temporal attention module, an imbalance-aware spatial attention module, and a radiation propagation prompting module, NRFormer collectively captures complex spatio-temporal dynamics of nuclear radiation. Extensive experiments on two real-world datasets demonstrate the superiority of our proposed framework against seven baselines. This research not only enhances the accuracy and reliability in nuclear radiation forecasting but also contributes to advancing emergency response strategies and monitoring systems, thereby safeguarding environmental and public health.
AutoSTF: Decoupled Neural Architecture Search for Cost-Effective Automated Spatio-Temporal Forecasting
Sep 25, 2024



Spatio-temporal forecasting is a critical component of various smart city applications, such as transportation optimization, energy management, and socio-economic analysis. Recently, several automated spatio-temporal forecasting methods have been proposed to automatically search the optimal neural network architecture for capturing complex spatio-temporal dependencies. However, the existing automated approaches suffer from expensive neural architecture search overhead, which hinders their practical use and the further exploration of diverse spatio-temporal operators in a finer granularity. In this paper, we propose AutoSTF, a decoupled automatic neural architecture search framework for cost-effective automated spatio-temporal forecasting. From the efficiency perspective, we first decouple the mixed search space into temporal space and spatial space and respectively devise representation compression and parameter-sharing schemes to mitigate the parameter explosion. The decoupled spatio-temporal search not only expedites the model optimization process but also leaves new room for more effective spatio-temporal dependency modeling. From the effectiveness perspective, we propose a multi-patch transfer module to jointly capture multi-granularity temporal dependencies and extend the spatial search space to enable finer-grained layer-wise spatial dependency search. Extensive experiments on eight datasets demonstrate the superiority of AutoSTF in terms of both accuracy and efficiency. Specifically, our proposed method achieves up to 13.48x speed-up compared to state-of-the-art automatic spatio-temporal forecasting methods while maintaining the best forecasting accuracy.
GraphPAS: Parallel Architecture Search for Graph Neural Networks
Dec 07, 2021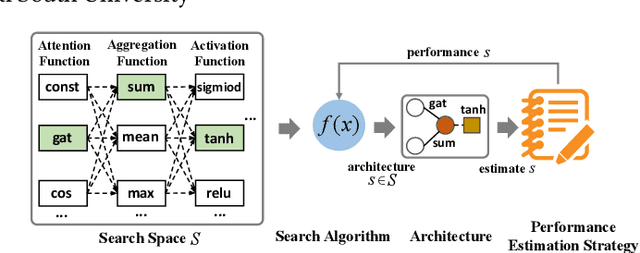
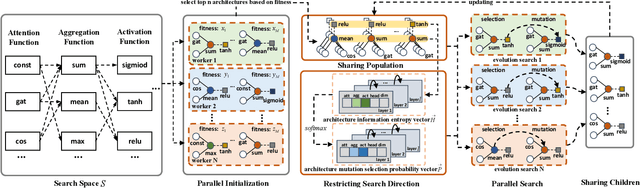
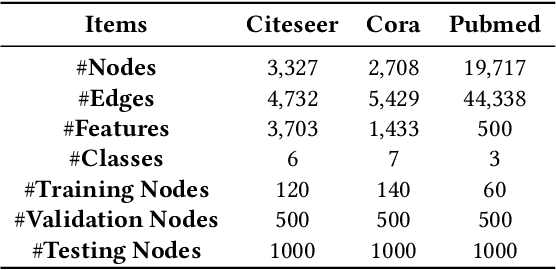
Graph neural architecture search has received a lot of attention as Graph Neural Networks (GNNs) has been successfully applied on the non-Euclidean data recently. However, exploring all possible GNNs architectures in the huge search space is too time-consuming or impossible for big graph data. In this paper, we propose a parallel graph architecture search (GraphPAS) framework for graph neural networks. In GraphPAS, we explore the search space in parallel by designing a sharing-based evolution learning, which can improve the search efficiency without losing the accuracy. Additionally, architecture information entropy is adopted dynamically for mutation selection probability, which can reduce space exploration. The experimental result shows that GraphPAS outperforms state-of-art models with efficiency and accuracy simultaneously.