 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Dexterous Grasp Learning from Single-View Point Clouds via a Multi-Object Scene Dataset
Mar 16, 2026Dexterous grasping in multi-object scene constitutes a fundamental challenge in robotic manipulation. Current mainstream grasping datasets predominantly focus on single-object scenarios and predefined grasp configurations, often neglecting environmental interference and the modeling of dexterous pre-grasp gesture, thereby limiting their generalizability in real-world applications. To address this, we propose DGS-Net, an end-to-end grasp prediction network capable of learning dense grasp configurations from single-view point clouds in multi-object scene. Furthermore, we propose a two-stage grasp data generation strategy that progresses from dense single-object grasp synthesis to dense scene-level grasp generation. Our dataset comprises 307 objects, 240 multi-object scenes, and over 350k validated grasps. By explicitly modeling grasp offsets and pre-grasp configurations, the dataset provides more robust and accurate supervision for dexterous grasp learning. Experimental results show that DGS-Net achieves grasp success rates of 88.63\% in simulation and 78.98\% on a real robotic platform, while exhibiting lower penetration with a mean penetration depth of 0.375 mm and penetration volume of 559.45 mm^3, outperforming existing methods and demonstrating strong effectiveness and generalization capability. Our dataset is available at https://github.com/4taotao8/DGS-Net.
DiffDesign: Controllable Diffusion with Meta Prior for Efficient Interior Design Generation
Nov 25, 2024



Interior design is a complex and creative discipline involving aesthetics, functionality, ergonomics, and materials science. Effective solutions must meet diverse requirements, typically producing multiple deliverables such as renderings and design drawings from various perspectives. Consequently, interior design processes are often inefficient and demand significant creativity. With advances in machine learning, generative models have emerged as a promising means of improving efficiency by creating designs from text descriptions or sketches. However, few generative works focus on interior design, leading to substantial discrepancies between outputs and practical needs, such as differences in size, spatial scope, and the lack of controllable generation quality. To address these challenges, we propose DiffDesign, a controllable diffusion model with meta priors for efficient interior design generation. Specifically, we utilize the generative priors of a 2D diffusion model pre-trained on a large image dataset as our rendering backbone. We further guide the denoising process by disentangling cross-attention control over design attributes, such as appearance, pose, and size, and introduce an optimal transfer-based alignment module to enforce view consistency. Simultaneously, we construct an interior design-specific dataset, DesignHelper, consisting of over 400 solutions across more than 15 spatial types and 15 design styles. This dataset helps fine-tune DiffDesign. Extensive experiments conducted on various benchmark datasets demonstrate the effectiveness and robustness of DiffDesign.
Color-related Local Binary Pattern: A Learned Local Descriptor for Color Image Recognition
Dec 11, 2020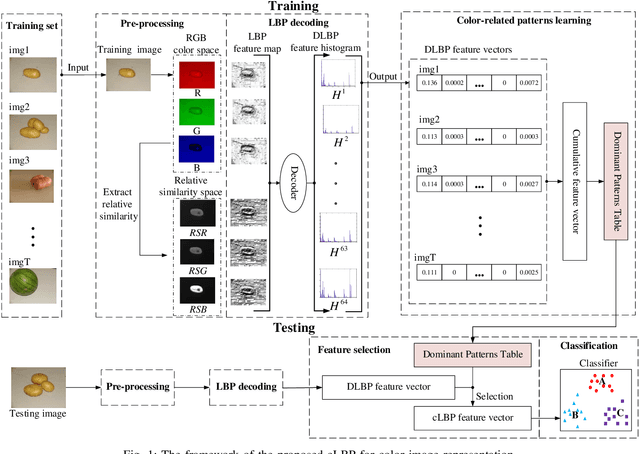
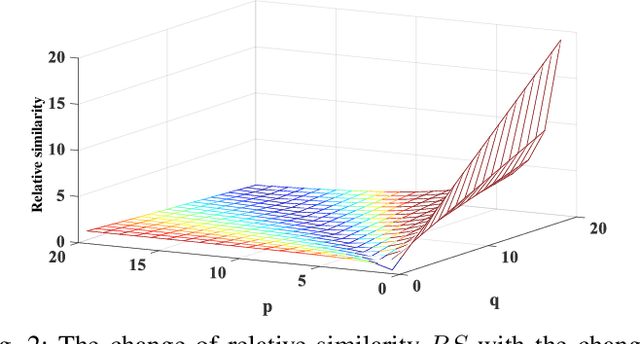
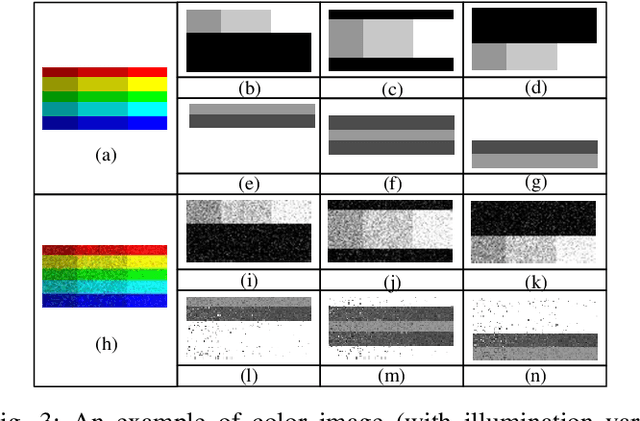
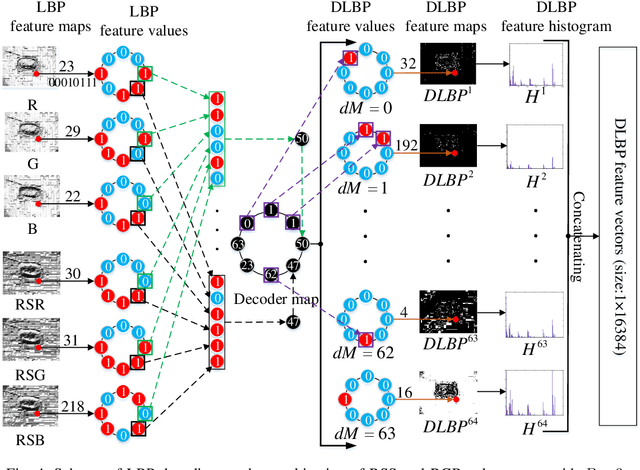
Local binary pattern (LBP) as a kind of local feature has shown its simplicity, easy implementation and strong discriminating power in image recognition. Although some LBP variants are specifically investigated for color image recognition, the color information of images is not adequately considered and the curse of dimensionality in classification is easily caused in these methods. In this paper, a color-related local binary pattern (cLBP) which learns the dominant patterns from the decoded LBP is proposed for color images recognition. This paper first proposes a relative similarity space (RSS) that represents the color similarity between image channels for describing a color image. Then, the decoded LBP which can mine the correlation information between the LBP feature maps correspond to each color channel of RSS traditional RGB spaces, is employed for feature extraction. Finally, a feature learning strategy is employed to learn the dominant color-related patterns for reducing the dimension of feature vector and further improving the discriminatively of features. The theoretic analysis show that the proposed RSS can provide more discriminative information, and has higher noise robustness as well as higher illumination variation robustness than traditional RGB space. Experimental results on four groups, totally twelve public color image datasets show that the proposed method outperforms most of the LBP variants for color image recognition in terms of dimension of features, recognition accuracy under noise-free, noisy and illumination variation conditions.