 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariance in Policy Optimisation and Partial Identifiability in Reward Learning
Mar 14, 2022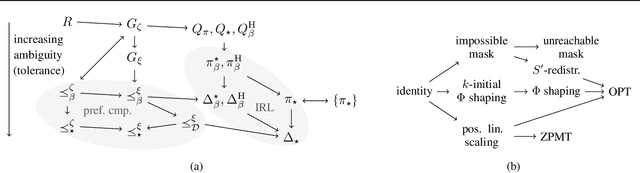
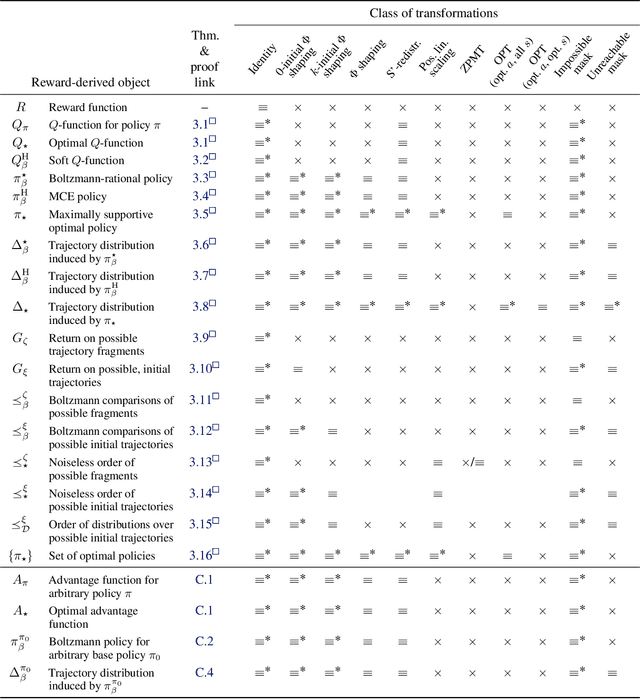
It's challenging to design reward functions for complex, real-world tasks. Reward learning lets one instead infer reward functions from data. However, multiple reward functions often fit the data equally well, even in the infinite-data limit. Prior work often considers reward functions to be uniquely recoverable, by imposing additional assumptions on data sources. By contrast, we formally characterise the partial identifiability of popular data sources, including demonstrations and trajectory preferences, under multiple common sets of assumptions. We analyse the impact of this partial identifiability on downstream tasks such as policy optimisation, including under changes in environment dynamics. We unify our results in a framework for comparing data sources and downstream tasks by their invariances, with implications for the design and selection of data sources for reward learning.
Cross-Domain Imitation Learning via Optimal Transport
Oct 14, 2021
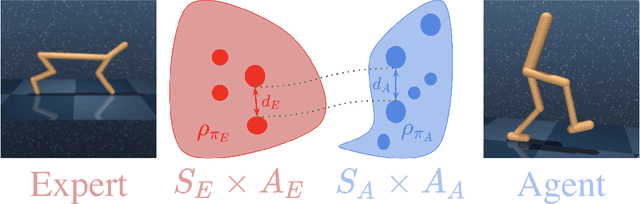
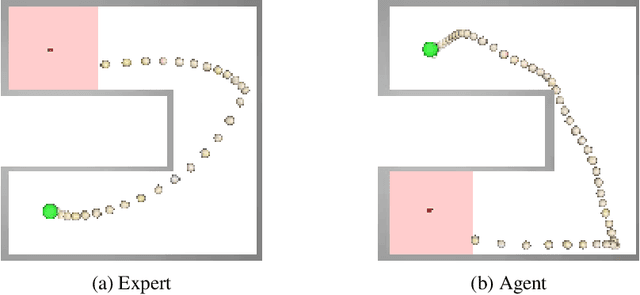
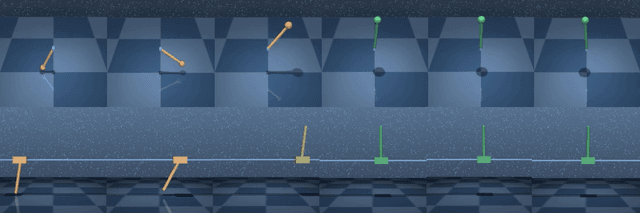
Cross-domain imitation learning studies how to leverage expert demonstrations of one agent to train an imitation agent with a different embodiment or morphology. Comparing trajectories and stationary distributions between the expert and imitation agents is challenging because they live on different systems that may not even have the same dimensionality. We propose Gromov-Wasserstein Imitation Learning (GWIL), a method for cross-domain imitation that uses the Gromov-Wasserstein distance to align and compare states between the different spaces of the agents. Our theory formally characterizes the scenarios where GWIL preserves optimality, revealing its possibilities and limitations. We demonstrate the effectiveness of GWIL in non-trivial continuous control domains ranging from simple rigid transformation of the expert domain to arbitrary transformation of the state-action space.
Detecting Modularity in Deep Neural Networks
Oct 13, 2021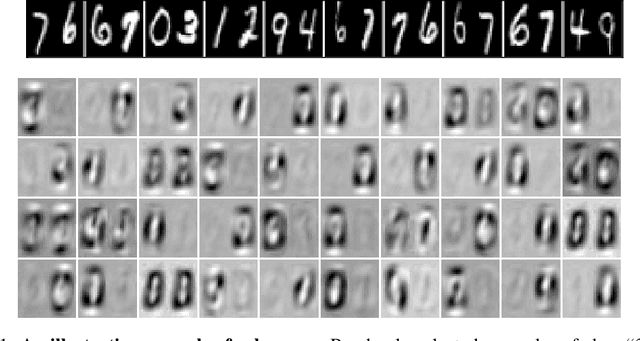
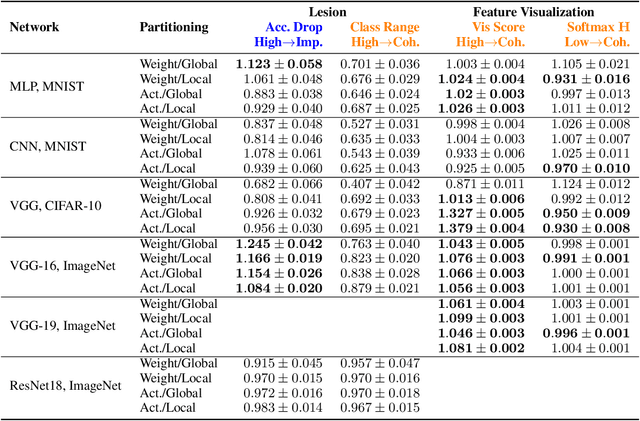
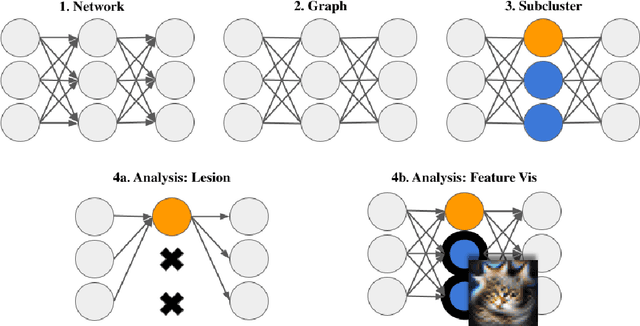
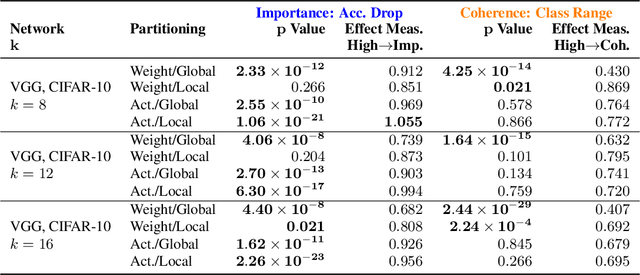
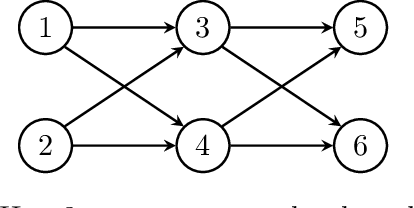
A neural network is modular to the extent that parts of its computational graph (i.e. structure) can be represented as performing some comprehensible subtask relevant to the overall task (i.e. functionality). Are modern deep neural networks modular? How can this be quantified? In this paper, we consider the problem of assessing the modularity exhibited by a partitioning of a network's neurons. We propose two proxies for this: importance, which reflects how crucial sets of neurons are to network performance; and coherence, which reflects how consistently their neurons associate with features of the inputs. To measure these proxies, we develop a set of statistical methods based on techniques conventionally used to interpret individual neurons. We apply the proxies to partitionings generated by spectrally clustering a graph representation of the network's neurons with edges determined either by network weights or correlations of activations. We show that these partitionings, even ones based only on weights (i.e. strictly from non-runtime analysis), reveal groups of neurons that are important and coherent. These results suggest that graph-based partitioning can reveal modularity and help us understand how deep neural networks function.
Scalable Online Planning via Reinforcement Learning Fine-Tuning
Sep 30, 2021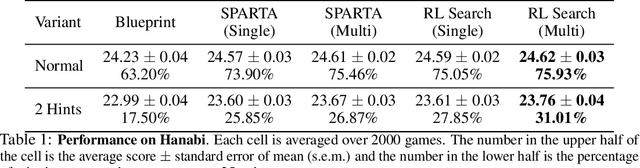
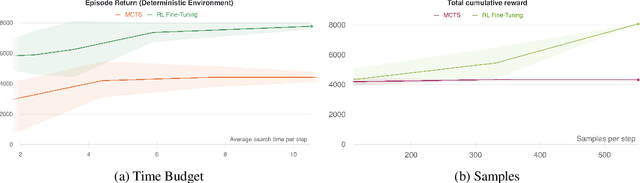
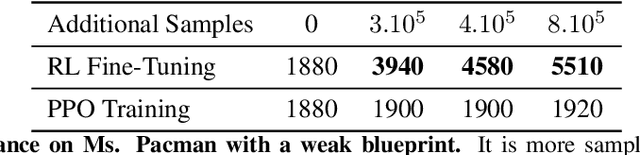
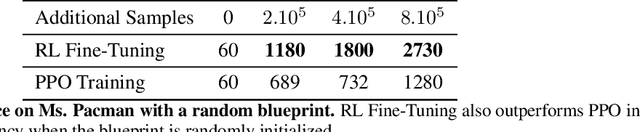
Lookahead search has been a critical component of recent AI successes, such as in the games of chess, go, and poker. However, the search methods used in these games, and in many other settings, are tabular. Tabular search methods do not scale well with the size of the search space, and this problem is exacerbated by stochasticity and partial observability. In this work we replace tabular search with online model-based fine-tuning of a policy neural network via reinforcement learning, and show that this approach outperforms state-of-the-art search algorithms in benchmark settings. In particular, we use our search algorithm to achieve a new state-of-the-art result in self-play Hanabi, and show the generality of our algorithm by also showing that it outperforms tabular search in the Atari game Ms. Pacman.
Explore and Control with Adversarial Surprise
Jul 12, 2021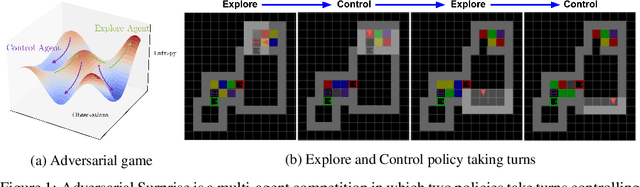
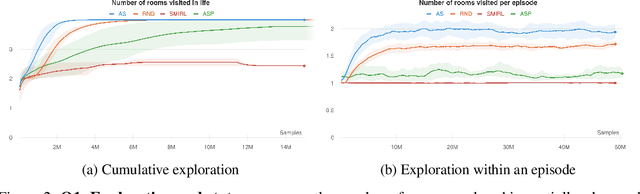
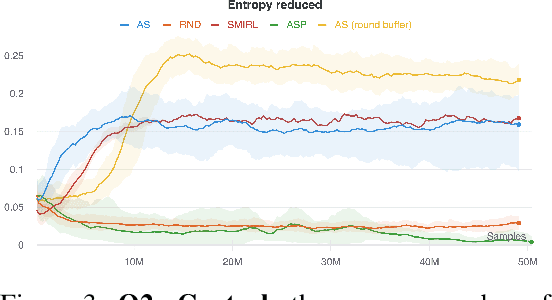
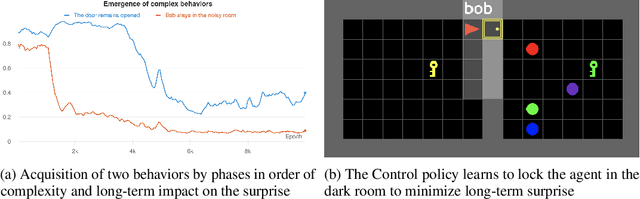
Reinforcement learning (RL) provides a framework for learning goal-directed policies given user-specified rewards. However, since designing rewards often requires substantial engineering effort, we are interested in the problem of learning without rewards, where agents must discover useful behaviors in the absence of task-specific incentives. Intrinsic motivation is a family of unsupervised RL techniques which develop general objectives for an RL agent to optimize that lead to better exploration or the discovery of skills. In this paper, we propose a new unsupervised RL technique based on an adversarial game which pits two policies against each other to compete over the amount of surprise an RL agent experiences. The policies each take turns controlling the agent. The Explore policy maximizes entropy, putting the agent into surprising or unfamiliar situations. Then, the Control policy takes over and seeks to recover from those situations by minimizing entropy. The game harnesses the power of multi-agent competition to drive the agent to seek out increasingly surprising parts of the environment while learning to gain mastery over them. We show empirically that our method leads to the emergence of complex skills by exhibiting clear phase transitions. Furthermore, we show both theoretically (via a latent state space coverage argument) and empirically that our method has the potential to be applied to the exploration of stochastic, partially-observed environments. We show that Adversarial Surprise learns more complex behaviors, and explores more effectively than competitive baselines, outperforming intrinsic motivation methods based on active inference, novelty-seeking (Random Network Distillation (RND)), and multi-agent unsupervised RL (Asymmetric Self-Play (ASP)) in MiniGrid, Atari and VizDoom environments.
The MineRL BASALT Competition on Learning from Human Feedback
Jul 05, 2021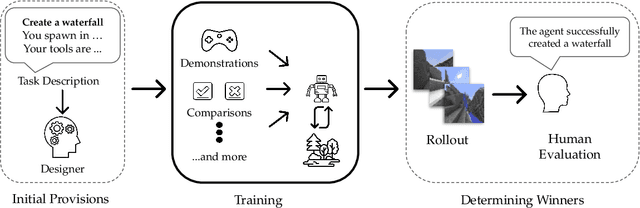
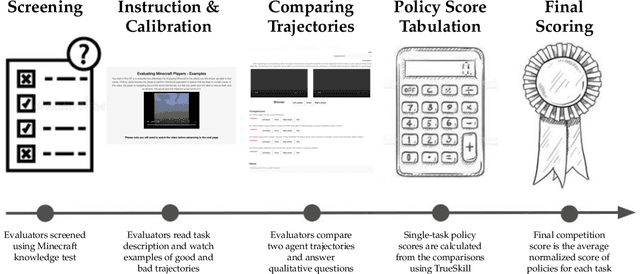
The last decade has seen a significant increase of interest in deep learning research, with many public successes that have demonstrated its potential. As such, these systems are now being incorporated into commercial products. With this comes an additional challenge: how can we build AI systems that solve tasks where there is not a crisp, well-defined specification? While multiple solutions have been proposed, in this competition we focus on one in particular: learning from human feedback. Rather than training AI systems using a predefined reward function or using a labeled dataset with a predefined set of categories, we instead train the AI system using a learning signal derived from some form of human feedback, which can evolve over time as the understanding of the task changes, or as the capabilities of the AI system improve. The MineRL BASALT competition aims to spur forward research on this important class of techniques. We design a suite of four tasks in Minecraft for which we expect it will be hard to write down hardcoded reward functions. These tasks are defined by a paragraph of natural language: for example, "create a waterfall and take a scenic picture of it", with additional clarifying details. Participants must train a separate agent for each task, using any method they want. Agents are then evaluated by humans who have read the task description. To help participants get started, we provide a dataset of human demonstrations on each of the four tasks, as well as an imitation learning baseline that leverages these demonstrations. Our hope is that this competition will improve our ability to build AI systems that do what their designers intend them to do, even when the intent cannot be easily formalized. Besides allowing AI to solve more tasks, this can also enable more effective regulation of AI systems, as well as making progress on the value alignment problem.
Learning the Preferences of Uncertain Humans with Inverse Decision Theory
Jun 19, 2021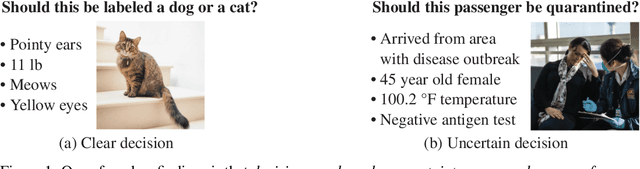
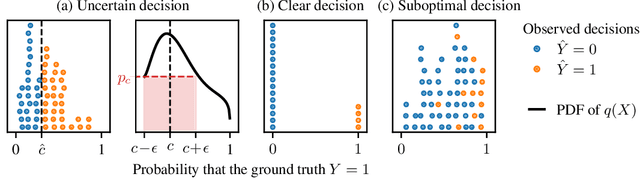
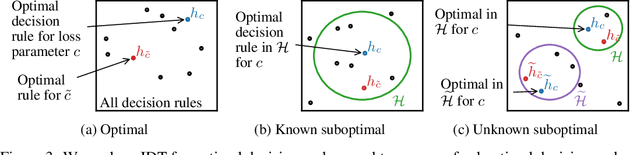
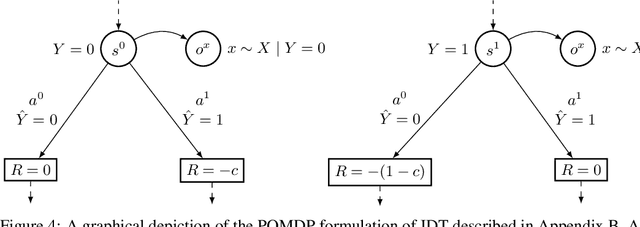
Existing observational approaches for learning human preferences, such as inverse reinforcement learning, usually make strong assumptions about the observability of the human's environment. However, in reality, people make many important decisions under uncertainty. To better understand preference learning in these cases, we study the setting of inverse decision theory (IDT), a previously proposed framework where a human is observed making non-sequential binary decisions under uncertainty. In IDT, the human's preferences are conveyed through their loss function, which expresses a tradeoff between different types of mistakes. We give the first statistical analysis of IDT, providing conditions necessary to identify these preferences and characterizing the sample complexity -- the number of decisions that must be observed to learn the tradeoff the human is making to a desired precision. Interestingly, we show that it is actually easier to identify preferences when the decision problem is more uncertain. Furthermore, uncertain decision problems allow us to relax the unrealistic assumption that the human is an optimal decision maker but still identify their exact preferences; we give sample complexities in this suboptimal case as well. Our analysis contradicts the intuition that partial observability should make preference learning more difficult. It also provides a first step towards understanding and improving preference learning methods for uncertain and suboptimal humans.
MADE: Exploration via Maximizing Deviation from Explored Regions
Jun 18, 2021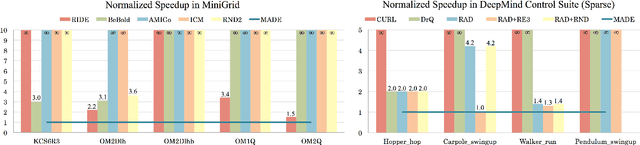

In online reinforcement learning (RL), efficient exploration remains particularly challenging in high-dimensional environments with sparse rewards. In low-dimensional environments, where tabular parameterization is possible, count-based upper confidence bound (UCB) exploration methods achieve minimax near-optimal rates. However, it remains unclear how to efficiently implement UCB in realistic RL tasks that involve non-linear function approximation. To address this, we propose a new exploration approach via \textit{maximizing} the deviation of the occupancy of the next policy from the explored regions. We add this term as an adaptive regularizer to the standard RL objective to balance exploration vs. exploitation. We pair the new objective with a provably convergent algorithm, giving rise to a new intrinsic reward that adjusts existing bonuses. The proposed intrinsic reward is easy to implement and combine with other existing RL algorithms to conduct exploration. As a proof of concept, we evaluate the new intrinsic reward on tabular examples across a variety of model-based and model-free algorithms, showing improvements over count-only exploration strategies. When tested on navigation and locomotion tasks from MiniGrid and DeepMind Control Suite benchmarks, our approach significantly improves sample efficiency over state-of-the-art methods. Our code is available at https://github.com/tianjunz/MADE.
Bridging Offline Reinforcement Learning and Imitation Learning: A Tale of Pessimism
Mar 22, 2021
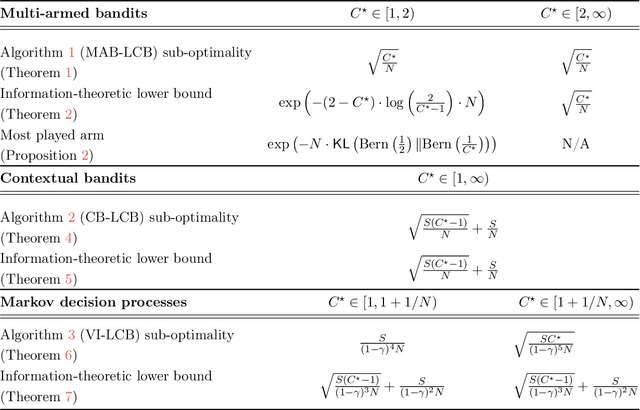
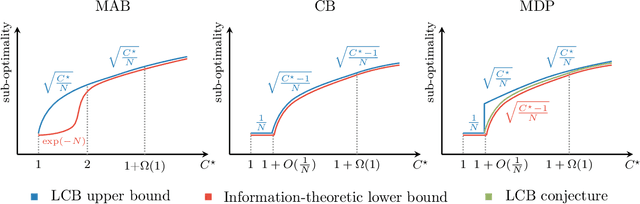
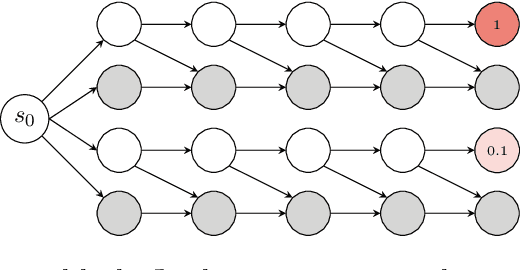
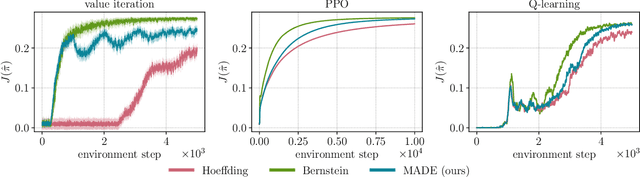
Offline (or batch) reinforcement learning (RL) algorithms seek to learn an optimal policy from a fixed dataset without active data collection. Based on the composition of the offline dataset, two main categories of methods are used: imitation learning which is suitable for expert datasets and vanilla offline RL which often requires uniform coverage datasets. From a practical standpoint, datasets often deviate from these two extremes and the exact data composition is usually unknown a priori. To bridge this gap, we present a new offline RL framework that smoothly interpolates between the two extremes of data composition, hence unifying imitation learning and vanilla offline RL. The new framework is centered around a weak version of the concentrability coefficient that measures the deviation from the behavior policy to the expert policy alone. Under this new framework, we further investigate the question on algorithm design: can one develop an algorithm that achieves a minimax optimal rate and also adapts to unknown data composition? To address this question, we consider a lower confidence bound (LCB) algorithm developed based on pessimism in the face of uncertainty in offline RL. We study finite-sample properties of LCB as well as information-theoretic limits in multi-armed bandits, contextual bandits, and Markov decision processes (MDPs). Our analysis reveals surprising facts about optimality rates. In particular, in all three settings, LCB achieves a faster rate of $1/N$ for nearly-expert datasets compared to the usual rate of $1/\sqrt{N}$ in offline RL, where $N$ is the number of samples in the batch dataset. In the case of contextual bandits with at least two contexts, we prove that LCB is adaptively optimal for the entire data composition range, achieving a smooth transition from imitation learning to offline RL. We further show that LCB is almost adaptively optimal in MDPs.
Clusterability in Neural Networks
Mar 04, 2021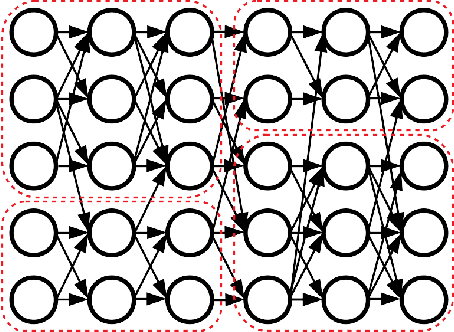

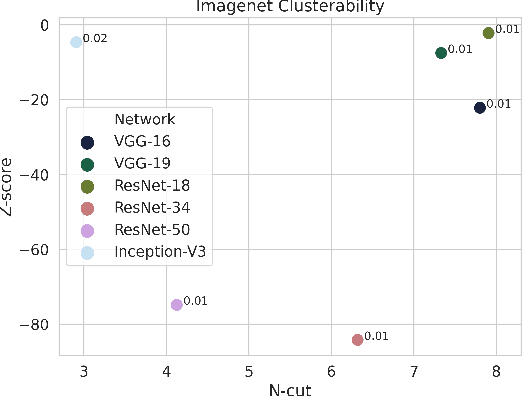
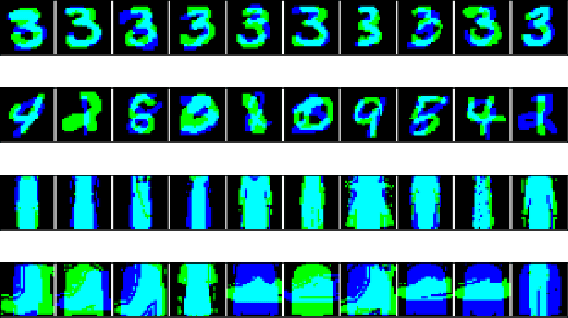
The learned weights of a neural network have often been considered devoid of scrutable internal structure. In this paper, however, we look for structure in the form of clusterability: how well a network can be divided into groups of neurons with strong internal connectivity but weak external connectivity. We find that a trained neural network is typically more clusterable than randomly initialized networks, and often clusterable relative to random networks with the same distribution of weights. We also exhibit novel methods to promote clusterability in neural network training, and find that in multi-layer perceptrons they lead to more clusterable networks with little reduction in accuracy. Understanding and controlling the clusterability of neural networks will hopefully render their inner workings more interpretable to engineers by facilitating partitioning into meaningful clusters.