 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUndermining Federated Learning Accuracy in EdgeIoT via Variational Graph Auto-Encoders
Apr 14, 2025



EdgeIoT represents an approach that brings together mobile edge computing with Internet of Things (IoT) devices, allowing for data processing close to the data source. Sending source data to a server is bandwidth-intensive and may compromise privacy. Instead, federated learning allows each device to upload a shared machine-learning model update with locally processed data. However, this technique, which depends on aggregating model updates from various IoT devices, is vulnerable to attacks from malicious entities that may inject harmful data into the learning process. This paper introduces a new attack method targeting federated learning in EdgeIoT, known as data-independent model manipulation attack. This attack does not rely on training data from the IoT devices but instead uses an adversarial variational graph auto-encoder (AV-GAE) to create malicious model updates by analyzing benign model updates intercepted during communication. AV-GAE identifies and exploits structural relationships between benign models and their training data features. By manipulating these structural correlations, the attack maximizes the training loss of the federated learning system, compromising its overall effectiveness.
OFDMA-F$^2$L: Federated Learning With Flexible Aggregation Over an OFDMA Air Interface
Nov 25, 2023Federated learning (FL) can suffer from a communication bottleneck when deployed in mobile networks, limiting participating clients and deterring FL convergence. The impact of practical air interfaces with discrete modulations on FL has not previously been studied in depth. This paper proposes a new paradigm of flexible aggregation-based FL (F$^2$L) over orthogonal frequency division multiple-access (OFDMA) air interface, termed as ``OFDMA-F$^2$L'', allowing selected clients to train local models for various numbers of iterations before uploading the models in each aggregation round. We optimize the selections of clients, subchannels and modulations, adapting to channel conditions and computing powers. Specifically, we derive an upper bound on the optimality gap of OFDMA-F$^2$L capturing the impact of the selections, and show that the upper bound is minimized by maximizing the weighted sum rate of the clients per aggregation round. A Lagrange-dual based method is developed to solve this challenging mixed integer program of weighted sum rate maximization, revealing that a ``winner-takes-all'' policy provides the almost surely optimal client, subchannel, and modulation selections. Experiments on multilayer perceptrons and convolutional neural networks show that OFDMA-F$^2$L with optimal selections can significantly improve the training convergence and accuracy, e.g., by about 18\% and 5\%, compared to potential alternatives.
RIS-Assisted Jamming Rejection and Path Planning for UAV-Borne IoT Platform: A New Deep Reinforcement Learning Framework
Feb 10, 2023This paper presents a new deep reinforcement learning (DRL)-based approach to the trajectory planning and jamming rejection of an unmanned aerial vehicle (UAV) for the Internet-of-Things (IoT) applications. Jamming can prevent timely delivery of sensing data and reception of operation instructions. With the assistance of a reconfigurable intelligent surface (RIS), we propose to augment the radio environment, suppress jamming signals, and enhance the desired signals. The UAV is designed to learn its trajectory and the RIS configuration based solely on changes in its received data rate, using the latest deep deterministic policy gradient (DDPG) and twin delayed DDPG (TD3) models. Simulations show that the proposed DRL algorithms give the UAV with strong resistance against jamming and that the TD3 algorithm exhibits faster and smoother convergence than the DDPG algorithm, and suits better for larger RISs. This DRL-based approach eliminates the need for knowledge of the channels involving the RIS and jammer, thereby offering significant practical value.
Learning-based Intelligent Surface Configuration, User Selection, Channel Allocation, and Modulation Adaptation for Jamming-resisting Multiuser OFDMA Systems
Jan 16, 2023Reconfigurable intelligent surfaces (RISs) can potentially combat jamming attacks by diffusing jamming signals. This paper jointly optimizes user selection, channel allocation, modulation-coding, and RIS configuration in a multiuser OFDMA system under a jamming attack. This problem is non-trivial and has never been addressed, because of its mixed-integer programming nature and difficulties in acquiring channel state information (CSI) involving the RIS and jammer. We propose a new deep reinforcement learning (DRL)-based approach, which learns only through changes in the received data rates of the users to reject the jamming signals and maximize the sum rate of the system. The key idea is that we decouple the discrete selection of users, channels, and modulation-coding from the continuous RIS configuration, hence facilitating the RIS configuration with the latest twin delayed deep deterministic policy gradient (TD3) model. Another important aspect is that we show a winner-takes-all strategy is almost surely optimal for selecting the users, channels, and modulation-coding, given a learned RIS configuration. Simulations show that the new approach converges fast to fulfill the benefit of the RIS, due to its substantially small state and action spaces. Without the need of the CSI, the approach is promising and offers practical value.
* accepted by IEEE TCOM in Jan. 2023
Joint Optimization of Trajectory, Propulsion and Thrust Powers for Covert UAV-on-UAV Video Tracking and Surveillance
Dec 22, 2020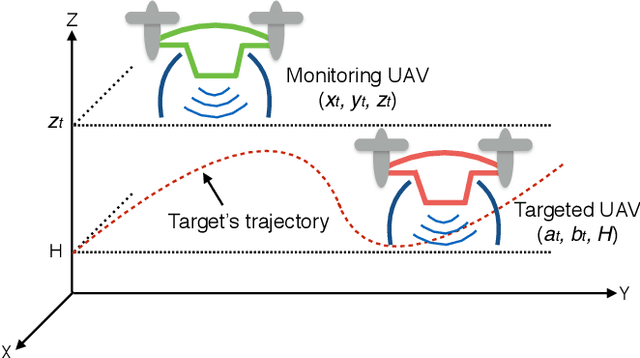

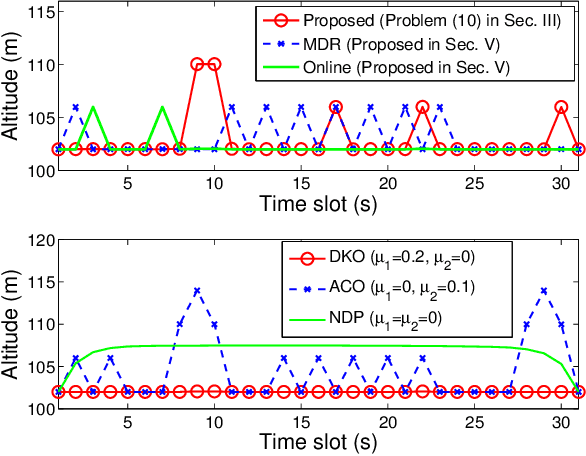
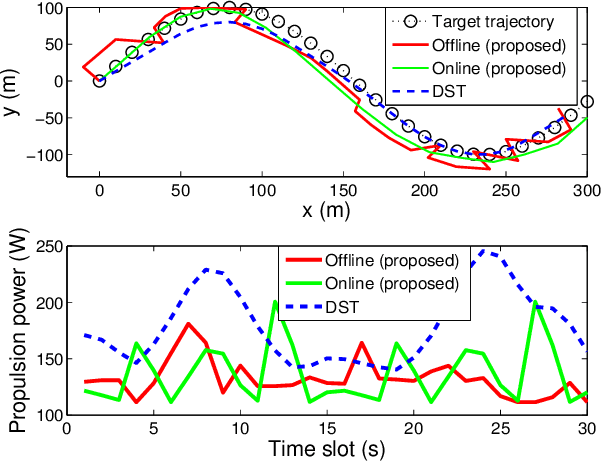
Autonomous tracking of suspicious unmanned aerial vehicles (UAVs) by legitimate monitoring UAVs (or monitors) can be crucial to public safety and security. It is non-trivial to optimize the trajectory of a monitor while conceiving its monitoring intention, due to typically non-convex propulsion and thrust power functions. This paper presents a novel framework to jointly optimize the propulsion and thrust powers, as well as the 3D trajectory of a solar-powered monitor which conducts covert, video-based, UAV-on-UAV tracking and surveillance. A multi-objective problem is formulated to minimize the energy consumption of the monitor and maximize a weighted sum of distance keeping and altitude changing, which measures the disguising of the monitor. Based on the practical power models of the UAV propulsion, thrust and hovering, and the model of the harvested solar power, the problem is non-convex and intangible for existing solvers. We convexify the propulsion power by variable substitution, and linearize the solar power. With successive convex approximation, the resultant problem is then transformed with tightened constraints and efficiently solved by the proximal difference-of-convex algorithm with extrapolation in polynomial time. The proposed scheme can be also applied online. Extensive simulations corroborate the merits of the scheme, as compared to baseline schemes with partial or no disguising.