 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDA-UCT: Self-Supervised Domain-Adaptive Ultrasound Computed Tomography for Rapid Musculoskeletal Sound Speed Reconstruction
May 24, 2026Ultrasound computed tomography (UCT) via full waveform inversion (FWI) enables high-resolution quantitative imaging for tissue characterization and disease diagnosis. However, UCT suffers from large computational burden and severe convergence issues due to highly nonlinear optimization. Deep learning can accelerate UCT reconstruction, but supervised training requires large-scale labeled datasets difficult to obtain in vivo. To address these limitations, we propose SDA-UCT, a two-stage self-supervised domain-adaptive framework for rapid and accurate UCT imaging of musculoskeletal tissues. SDA-UCT employs an attention-enhanced network (AttUCT) pre-trained on simulation datasets and transfers to in-vivo data via physics-informed self-supervised learning, effectively bridging the simulation-to-real domain gap. A Low-Rank Adaptation (LoRA) mechanism is integrated to enable efficient adaptation across diverse clinical scenarios. Results showed that AttUCT achieved high-quality SOS reconstruction for simulated human forearm with a PSNR of 29.23 dB and SSIM of 0.928, outperforming conventional FWI and existing deep learning methods. Validated on in-vivo data, SDA-UCT successfully reconstructed SOS images revealing complex anatomical structures (skin, fat, muscle, tendon, bone and bone marrow) for human forearm, in high concordance with MRI references. The LoRA mechanism adjusting only 3% of parameters achieved comparable performance to full fine-tuning. The rapid reconstruction (5 ms per frame) enables real-time 3D visualization, achieving five-orders-of-magnitude improvement over traditional FWI. This work represents the first self-supervised domain-adaptive deep learning for rapid, high-resolution in-vivo UCT imaging, showing potential for musculoskeletal disease diagnosis.
Joint Optimization of Trajectory, Propulsion and Thrust Powers for Covert UAV-on-UAV Video Tracking and Surveillance
Dec 22, 2020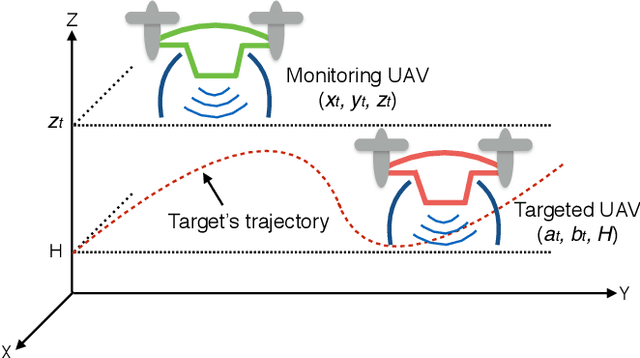

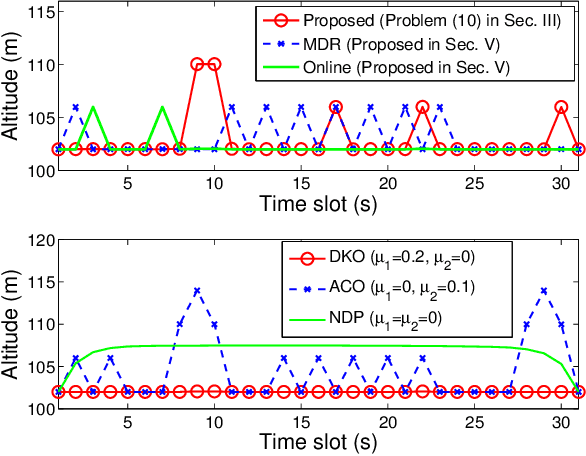
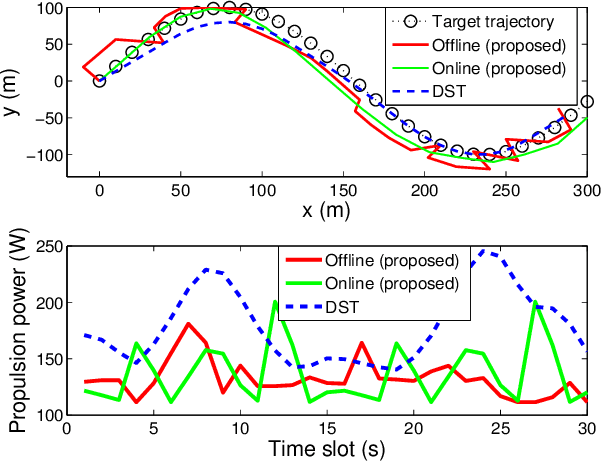
Autonomous tracking of suspicious unmanned aerial vehicles (UAVs) by legitimate monitoring UAVs (or monitors) can be crucial to public safety and security. It is non-trivial to optimize the trajectory of a monitor while conceiving its monitoring intention, due to typically non-convex propulsion and thrust power functions. This paper presents a novel framework to jointly optimize the propulsion and thrust powers, as well as the 3D trajectory of a solar-powered monitor which conducts covert, video-based, UAV-on-UAV tracking and surveillance. A multi-objective problem is formulated to minimize the energy consumption of the monitor and maximize a weighted sum of distance keeping and altitude changing, which measures the disguising of the monitor. Based on the practical power models of the UAV propulsion, thrust and hovering, and the model of the harvested solar power, the problem is non-convex and intangible for existing solvers. We convexify the propulsion power by variable substitution, and linearize the solar power. With successive convex approximation, the resultant problem is then transformed with tightened constraints and efficiently solved by the proximal difference-of-convex algorithm with extrapolation in polynomial time. The proposed scheme can be also applied online. Extensive simulations corroborate the merits of the scheme, as compared to baseline schemes with partial or no disguising.