 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe 3rd Anti-UAV Workshop & Challenge: Methods and Results
May 12, 2023


The 3rd Anti-UAV Workshop & Challenge aims to encourage research in developing novel and accurate methods for multi-scale object tracking. The Anti-UAV dataset used for the Anti-UAV Challenge has been publicly released. There are two main differences between this year's competition and the previous two. First, we have expanded the existing dataset, and for the first time, released a training set so that participants can focus on improving their models. Second, we set up two tracks for the first time, i.e., Anti-UAV Tracking and Anti-UAV Detection & Tracking. Around 76 participating teams from the globe competed in the 3rd Anti-UAV Challenge. In this paper, we provide a brief summary of the 3rd Anti-UAV Workshop & Challenge including brief introductions to the top three methods in each track. The submission leaderboard will be reopened for researchers that are interested in the Anti-UAV challenge. The benchmark dataset and other information can be found at: https://anti-uav.github.io/.
EdgeYOLO: An Edge-Real-Time Object Detector
Feb 15, 2023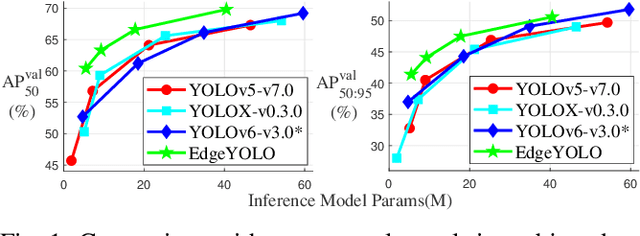
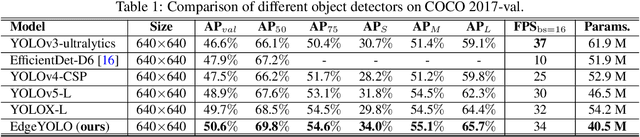
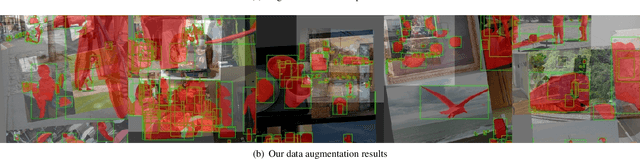
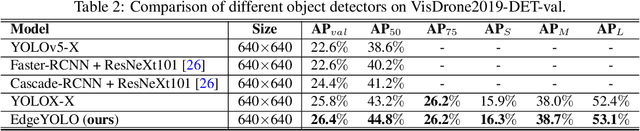
This paper proposes an efficient, low-complexity and anchor-free object detector based on the state-of-the-art YOLO framework, which can be implemented in real time on edge computing platforms. We develop an enhanced data augmentation method to effectively suppress overfitting during training, and design a hybrid random loss function to improve the detection accuracy of small objects. Inspired by FCOS, a lighter and more efficient decoupled head is proposed, and its inference speed can be improved with little loss of precision. Our baseline model can reach the accuracy of 50.6% AP50:95 and 69.8% AP50 in MS COCO2017 dataset, 26.4% AP50:95 and 44.8% AP50 in VisDrone2019-DET dataset, and it meets real-time requirements (FPS>=30) on edge-computing device Nvidia Jetson AGX Xavier. We also designed lighter models with less parameters for edge computing devices with lower computing power, which also show better performances. Our source code, hyper-parameters and model weights are all available at https://github.com/LSH9832/edgeyolo.