 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning as Goal Recognition: Deriving Heuristics from Intention Models - Extended Version
Mar 16, 2026Classical planning aims to find a sequence of actions, a plan, that maps a starting state into one of the goal states. If a trajectory appears to be leading to the goal, should we prioritise exploring it? Seminal work in goal recognition (GR) has defined GR in terms of a classical planning problem, adopting classical solvers and heuristics to recognise plans. We come full circle, and study the adoption and properties of GR-derived heuristics for seeking solutions to classical planning problems. We propose a new framework for assessing goal intention, which informs a new class of efficiently-computable heuristics. As a proof of concept, we derive two such heuristics, and show that they can already yield improvements for top-scoring classical planners. Our work provides foundational knowledge for understanding and deriving probabilistic intention-based heuristics for planning.
Predicted-occupancy grids for vehicle safety applications based on autoencoders and the Random Forest algorithm
Dec 15, 2025



In this paper, a probabilistic space-time representation of complex traffic scenarios is predicted using machine learning algorithms. Such a representation is significant for all active vehicle safety applications especially when performing dynamic maneuvers in a complex traffic scenario. As a first step, a hierarchical situation classifier is used to distinguish the different types of traffic scenarios. This classifier is responsible for identifying the type of the road infrastructure and the safety-relevant traffic participants of the driving environment. With each class representing similar traffic scenarios, a set of Random Forests (RFs) is individually trained to predict the probabilistic space-time representation, which depicts the future behavior of traffic participants. This representation is termed as a Predicted-Occupancy Grid (POG). The input to the RFs is an Augmented Occupancy Grid (AOG). In order to increase the learning accuracy of the RFs and to perform better predictions, the AOG is reduced to low-dimensional features using a Stacked Denoising Autoencoder (SDA). The excellent performance of the proposed machine learning approach consisting of SDAs and RFs is demonstrated in simulations and in experiments with real vehicles. An application of POGs to estimate the criticality of traffic scenarios and to determine safe trajectories is also presented.
Machine Learning Architectures for the Estimation of Predicted Occupancy Grids in Road Traffic
Dec 15, 2025



This paper introduces a novel machine learning architecture for an efficient estimation of the probabilistic space-time representation of complex traffic scenarios. A detailed representation of the future traffic scenario is of significant importance for autonomous driving and for all active safety systems. In order to predict the future space-time representation of the traffic scenario, first the type of traffic scenario is identified and then the machine learning algorithm maps the current state of the scenario to possible future states. The input to the machine learning algorithms is the current state representation of a traffic scenario, termed as the Augmented Occupancy Grid (AOG). The output is the probabilistic space-time representation which includes uncertainties regarding the behaviour of the traffic participants and is termed as the Predicted Occupancy Grid (POG). The novel architecture consists of two Stacked Denoising Autoencoders (SDAs) and a set of Random Forests. It is then compared with the other two existing architectures that comprise of SDAs and DeconvNet. The architectures are validated with the help of simulations and the comparisons are made both in terms of accuracy and computational time. Also, a brief overview on the applications of POGs in the field of active safety is presented.
Data-Driven Goal Recognition in Transhumeral Prostheses Using Process Mining Techniques
Sep 15, 2023A transhumeral prosthesis restores missing anatomical segments below the shoulder, including the hand. Active prostheses utilize real-valued, continuous sensor data to recognize patient target poses, or goals, and proactively move the artificial limb. Previous studies have examined how well the data collected in stationary poses, without considering the time steps, can help discriminate the goals. In this case study paper, we focus on using time series data from surface electromyography electrodes and kinematic sensors to sequentially recognize patients' goals. Our approach involves transforming the data into discrete events and training an existing process mining-based goal recognition system. Results from data collected in a virtual reality setting with ten subjects demonstrate the effectiveness of our proposed goal recognition approach, which achieves significantly better precision and recall than the state-of-the-art machine learning techniques and is less confident when wrong, which is beneficial when approximating smoother movements of prostheses.
Flexible FOND Planning with Explicit Fairness Assumptions
Mar 15, 2021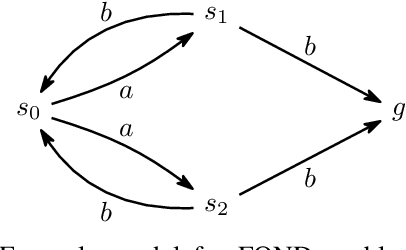
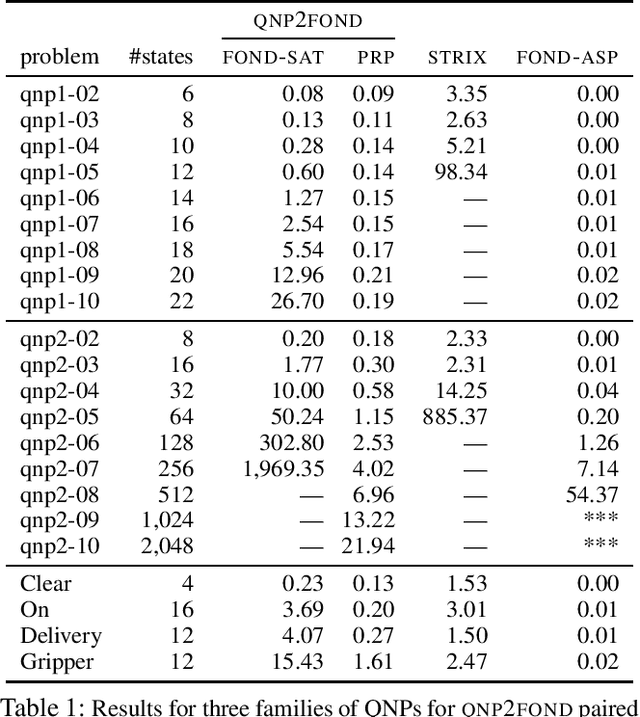
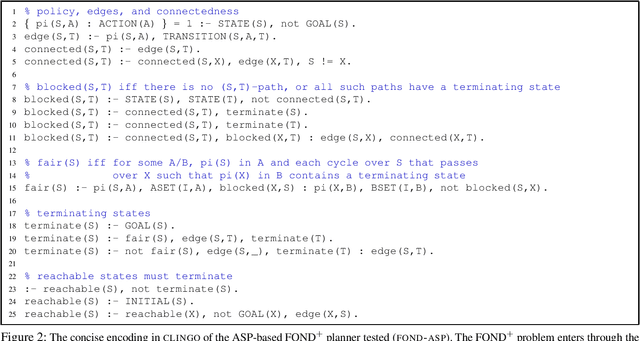
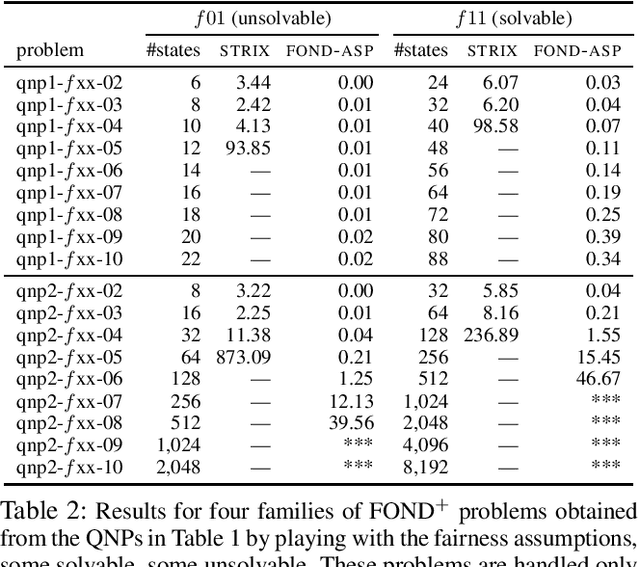
We consider the problem of reaching a propositional goal condition in fully-observable non-deterministic (FOND) planning under a general class of fairness assumptions that are given explicitly. The fairness assumptions are of the form A/B and say that state trajectories that contain infinite occurrences of an action a from A in a state s and finite occurrence of actions from B, must also contain infinite occurrences of action a in s followed by each one of its possible outcomes. The infinite trajectories that violate this condition are deemed as unfair, and the solutions are policies for which all the fair trajectories reach a goal state. We show that strong and strong-cyclic FOND planning, as well as QNP planning, a planning model introduced recently for generalized planning, are all special cases of FOND planning with fairness assumptions of this form which can also be combined. FOND+ planning, as this form of planning is called, combines the syntax of FOND planning with some of the versatility of LTL for expressing fairness constraints. A new planner is implemented by reducing FOND+ planning to answer set programs, and the performance of the planner is evaluated in comparison with FOND and QNP planners, and LTL synthesis tools.
Multi-tier Automated Planning for Adaptive Behavior (Extended Version)
Feb 27, 2020A planning domain, as any model, is never complete and inevitably makes assumptions on the environment's dynamic. By allowing the specification of just one domain model, the knowledge engineer is only able to make one set of assumptions, and to specify a single objective-goal. Borrowing from work in Software Engineering, we propose a multi-tier framework for planning that allows the specification of different sets of assumptions, and of different corresponding objectives. The framework aims to support the synthesis of adaptive behavior so as to mitigate the intrinsic risk in any planning modeling task. After defining the multi-tier planning task and its solution concept, we show how to solve problem instances by a succinct compilation to a form of non-deterministic planning. In doing so, our technique justifies the applicability of planning with both fair and unfair actions, and the need for more efforts in developing planning systems supporting dual fairness assumptions.
Situation Calculus for Synthesis of Manufacturing Controllers
Jul 12, 2018
Manufacturing is transitioning from a mass production model to a manufacturing as a service model in which manufacturing facilities 'bid' to produce products. To decide whether to bid for a complex, previously unseen product, a manufacturing facility must be able to synthesize, 'on the fly', a process plan controller that delegates abstract manufacturing tasks in the supplied process recipe to the appropriate manufacturing resources, e.g., CNC machines, robots etc. Previous work in applying AI behaviour composition to synthesize process plan controllers has considered only finite state ad-hoc representations. Here, we study the problem in the relational setting of the Situation Calculus. By taking advantage of recent work on abstraction in the Situation Calculus, process recipes and available resources are represented by ConGolog programs over, respectively, an abstract and a concrete action theory. This allows us to capture the problem in a formal, general framework, and show decidability for the case of bounded action theories. We also provide techniques for actually synthesizing the controller.
Phase transition in the knapsack problem
Jun 26, 2018
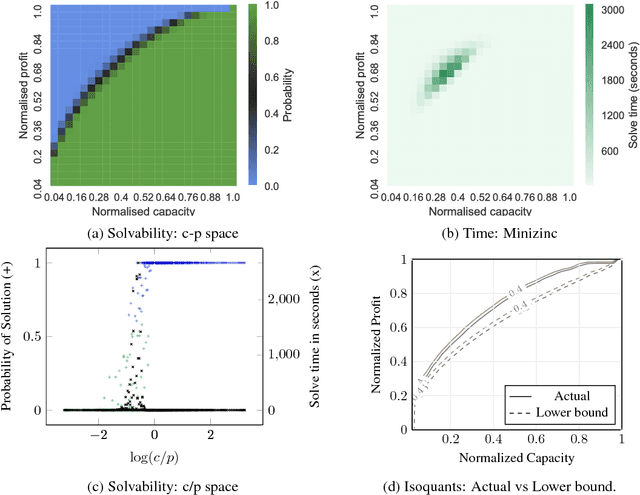
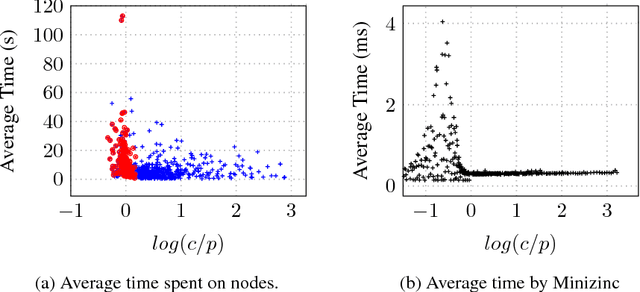
We examine the phase transition phenomenon for the Knapsack problem from both a computational and a human perspective. We first provide, via an empirical and a theoretical analysis, a characterization of the phenomenon in terms of two instance properties; normalised capacity and normalised profit. Then, we show evidence that average time spent by human decision makers in solving an instance peaks near the phase transition. Given the ubiquity of the Knapsack problem in every-day life, a better understanding of its structure can improve our understanding not only of computational techniques but also of human behavior, including the use and development of heuristics and occurrence of biases.
Addendum to: Summary Information for Reasoning About Hierarchical Plans
Aug 09, 2017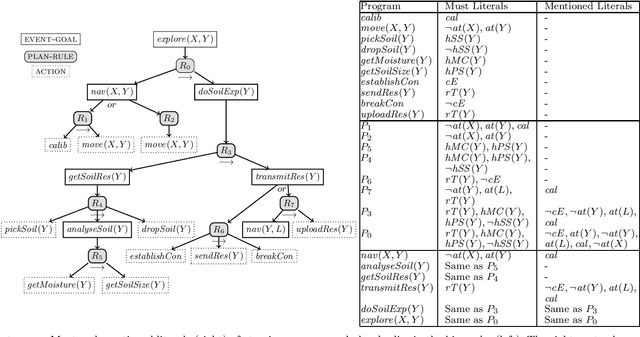
Hierarchically structured agent plans are important for efficient planning and acting, and they also serve (among other things) to produce "richer" classical plans, composed not just of a sequence of primitive actions, but also "abstract" ones representing the supplied hierarchies. A crucial step for this and other approaches is deriving precondition and effect "summaries" from a given plan hierarchy. This paper provides mechanisms to do this for more pragmatic and conventional hierarchies than in the past. To this end, we formally define the notion of a precondition and an effect for a hierarchical plan; we present data structures and algorithms for automatically deriving this information; and we analyse the properties of the presented algorithms. We conclude the paper by detailing how our algorithms may be used together with a classical planner in order to obtain abstract plans.
Path planning with Inventory-driven Jump-Point-Search
Jul 04, 2016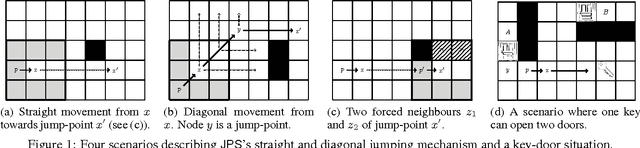
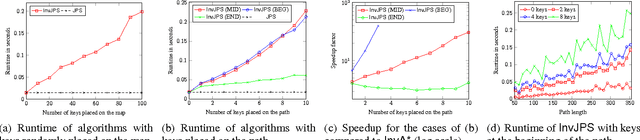
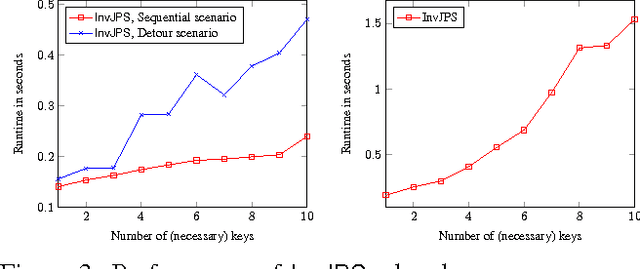
In many navigational domains the traversability of cells is conditioned on the path taken. This is often the case in video-games, in which a character may need to acquire a certain object (i.e., a key or a flying suit) to be able to traverse specific locations (e.g., doors or high walls). In order for non-player characters to handle such scenarios we present invJPS, an "inventory-driven" pathfinding approach based on the highly successful grid-based Jump-Point-Search (JPS) algorithm. We show, formally and experimentally, that the invJPS preserves JPS's optimality guarantees and its symmetry breaking advantages in inventory-based variants of game maps.