 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOMIND: Framework for Knowledge Grounded Finetuning and Multi-Turn Dialogue Benchmark for Mental Health LLMs
Mar 26, 2026Large Language Models (LLMs) have shown remarkable capabilities for complex tasks, yet adaptation in medical domain, specifically mental health, poses specific challenges. Mental health is a rising concern globally with LLMs having large potential to help address the same. We highlight three primary challenges for LLMs in mental health - lack of high quality interpretable and knowledge grounded training data; training paradigms restricted to core capabilities, and evaluation of multi turn dialogue settings. Addressing it, we present oMind framework which includes training and aligning LLM agents for diverse capabilities including conversations; high quality ~164k multi-task SFT dataset, as a result of our generation pipeline based on Structured Knowledge retrieval, LLM based pruning, and review actions. We also introduce oMind-Chat - a novel multi turn benchmark dataset with expert annotated turn level and conversation level rubrics. Our diverse experiments on both core capabilities and conversations shows oMind LLMs consistently outperform baselines. oMind-LLM also shows significantly better reasoning with up to 80% win rate.
Generating Query-Relevant Document Summaries via Reinforcement Learning
Aug 11, 2025E-commerce search engines often rely solely on product titles as input for ranking models with latency constraints. However, this approach can result in suboptimal relevance predictions, as product titles often lack sufficient detail to capture query intent. While product descriptions provide richer information, their verbosity and length make them unsuitable for real-time ranking, particularly for computationally expensive architectures like cross-encoder ranking models. To address this challenge, we propose ReLSum, a novel reinforcement learning framework designed to generate concise, query-relevant summaries of product descriptions optimized for search relevance. ReLSum leverages relevance scores as rewards to align the objectives of summarization and ranking, effectively overcoming limitations of prior methods, such as misaligned learning targets. The framework employs a trainable large language model (LLM) to produce summaries, which are then used as input for a cross-encoder ranking model. Experimental results demonstrate significant improvements in offline metrics, including recall and NDCG, as well as online user engagement metrics. ReLSum provides a scalable and efficient solution for enhancing search relevance in large-scale e-commerce systems.
Knowledge Distillation for Enhancing Walmart E-commerce Search Relevance Using Large Language Models
May 11, 2025



Ensuring the products displayed in e-commerce search results are relevant to users queries is crucial for improving the user experience. With their advanced semantic understanding, deep learning models have been widely used for relevance matching in search tasks. While large language models (LLMs) offer superior ranking capabilities, it is challenging to deploy LLMs in real-time systems due to the high-latency requirements. To leverage the ranking power of LLMs while meeting the low-latency demands of production systems, we propose a novel framework that distills a high performing LLM into a more efficient, low-latency student model. To help the student model learn more effectively from the teacher model, we first train the teacher LLM as a classification model with soft targets. Then, we train the student model to capture the relevance margin between pairs of products for a given query using mean squared error loss. Instead of using the same training data as the teacher model, we significantly expand the student model dataset by generating unlabeled data and labeling it with the teacher model predictions. Experimental results show that the student model performance continues to improve as the size of the augmented training data increases. In fact, with enough augmented data, the student model can outperform the teacher model. The student model has been successfully deployed in production at Walmart.com with significantly positive metrics.
* 9 pages, published at WWWW'25
Phase transition in the knapsack problem
Jun 26, 2018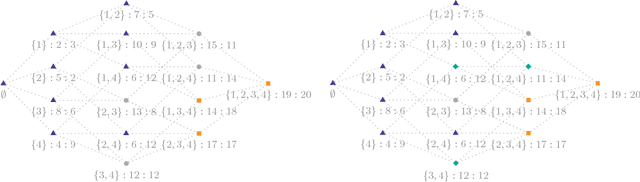
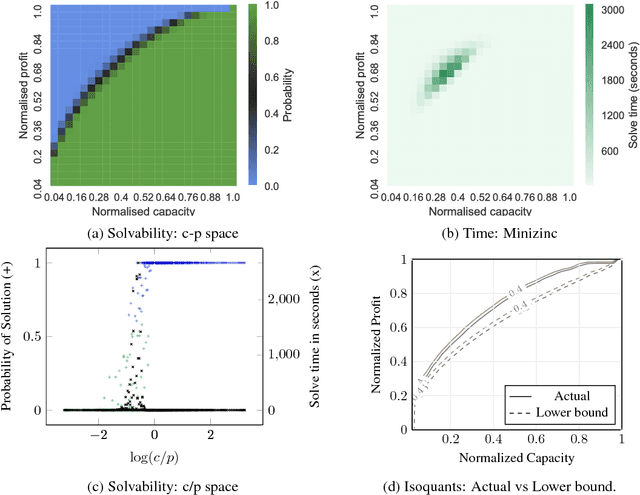
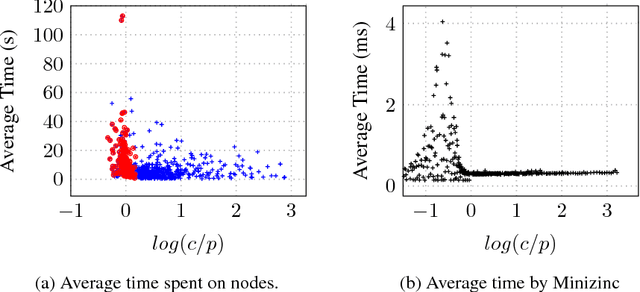
We examine the phase transition phenomenon for the Knapsack problem from both a computational and a human perspective. We first provide, via an empirical and a theoretical analysis, a characterization of the phenomenon in terms of two instance properties; normalised capacity and normalised profit. Then, we show evidence that average time spent by human decision makers in solving an instance peaks near the phase transition. Given the ubiquity of the Knapsack problem in every-day life, a better understanding of its structure can improve our understanding not only of computational techniques but also of human behavior, including the use and development of heuristics and occurrence of biases.
Supervisory Control for Behavior Composition
Apr 29, 2016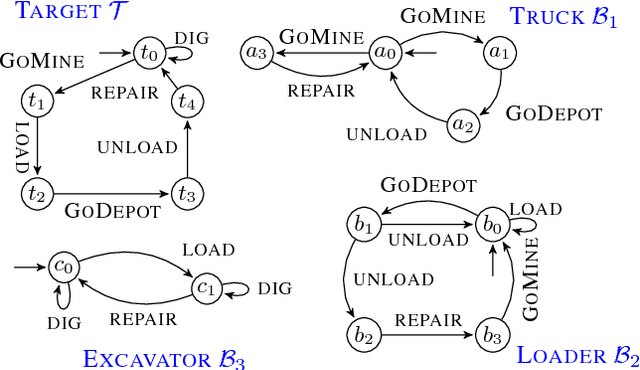
We relate behavior composition, a synthesis task studied in AI, to supervisory control theory from the discrete event systems field. In particular, we show that realizing (i.e., implementing) a target behavior module (e.g., a house surveillance system) by suitably coordinating a collection of available behaviors (e.g., automatic blinds, doors, lights, cameras, etc.) amounts to imposing a supervisor onto a special discrete event system. Such a link allows us to leverage on the solid foundations and extensive work on discrete event systems, including borrowing tools and ideas from that field. As evidence of that we show how simple it is to introduce preferences in the mapped framework.
Reasoning about Agent Programs using ATL-like Logics
Jul 17, 2012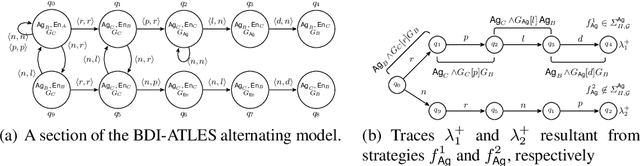
We propose a variant of Alternating-time Temporal Logic (ATL) grounded in the agents' operational know-how, as defined by their libraries of abstract plans. Inspired by ATLES, a variant itself of ATL, it is possible in our logic to explicitly refer to "rational" strategies for agents developed under the Belief-Desire-Intention agent programming paradigm. This allows us to express and verify properties of BDI systems using ATL-type logical frameworks.
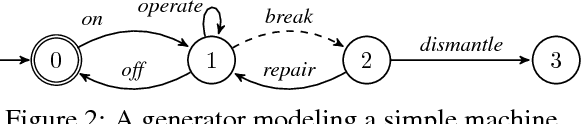
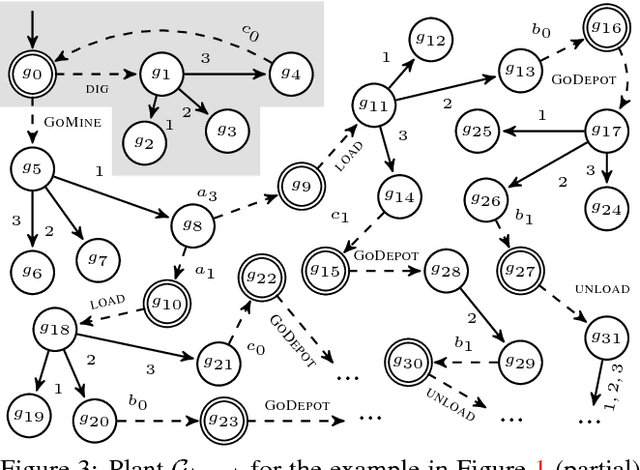
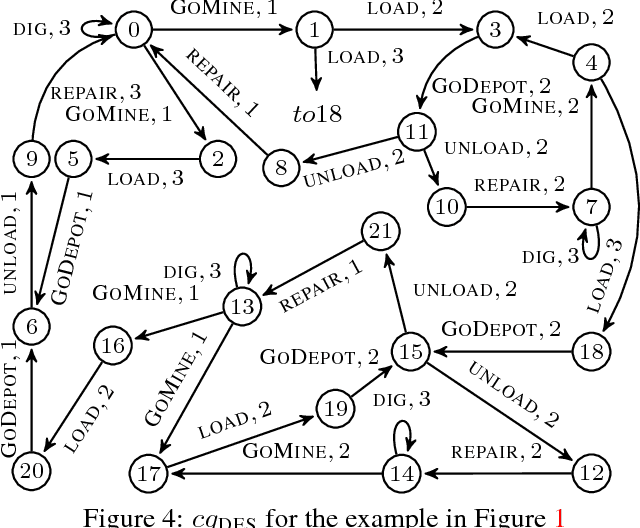
Qualitative Approximate Behavior Composition
Jul 17, 2012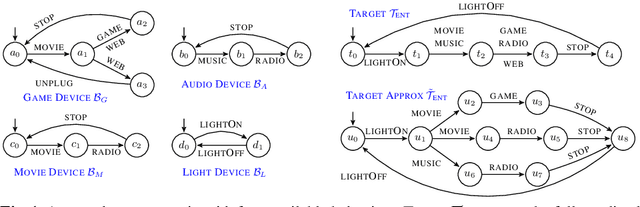
The behavior composition problem involves automatically building a controller that is able to realize a desired, but unavailable, target system (e.g., a house surveillance) by suitably coordinating a set of available components (e.g., video cameras, blinds, lamps, a vacuum cleaner, phones, etc.) Previous work has almost exclusively aimed at bringing about the desired component in its totality, which is highly unsatisfactory for unsolvable problems. In this work, we develop an approach for approximate behavior composition without departing from the classical setting, thus making the problem applicable to a much wider range of cases. Based on the notion of simulation, we characterize what a maximal controller and the "closest" implementable target module (optimal approximation) are, and show how these can be computed using ATL model checking technology for a special case. We show the uniqueness of optimal approximations, and prove their soundness and completeness with respect to their imported controllers.