 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable Failure Analysis in Multi-Agent Reinforcement Learning Systems
Feb 08, 2026Multi-Agent Reinforcement Learning (MARL) is increasingly deployed in safety-critical domains, yet methods for interpretable failure detection and attribution remain underdeveloped. We introduce a two-stage gradient-based framework that provides interpretable diagnostics for three critical failure analysis tasks: (1) detecting the true initial failure source (Patient-0); (2) validating why non-attacked agents may be flagged first due to domino effects; and (3) tracing how failures propagate through learned coordination pathways. Stage 1 performs interpretable per-agent failure detection via Taylor-remainder analysis of policy-gradient costs, declaring an initial Patient-0 candidate at the first threshold crossing. Stage 2 provides validation through geometric analysis of critic derivatives-first-order sensitivity and directional second-order curvature aggregated over causal windows to construct interpretable contagion graphs. This approach explains "downstream-first" detection anomalies by revealing pathways that amplify upstream deviations. Evaluated across 500 episodes in Simple Spread (3 and 5 agents) and 100 episodes in StarCraft II using MADDPG and HATRPO, our method achieves 88.2-99.4% Patient-0 detection accuracy while providing interpretable geometric evidence for detection decisions. By moving beyond black-box detection to interpretable gradient-level forensics, this framework offers practical tools for diagnosing cascading failures in safety-critical MARL systems.
From Orthomosaics to Raw UAV Imagery: Enhancing Palm Detection and Crown-Center Localization
Sep 15, 2025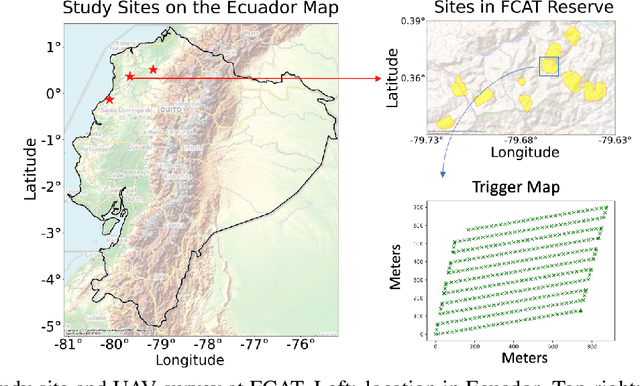
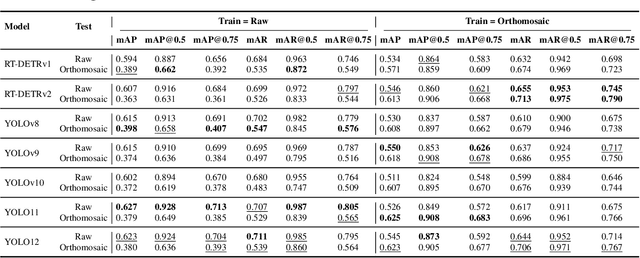
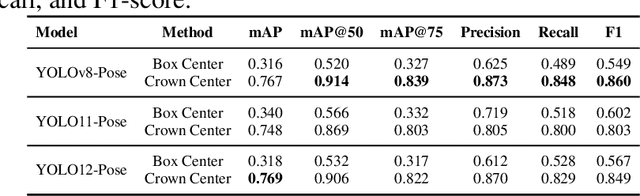
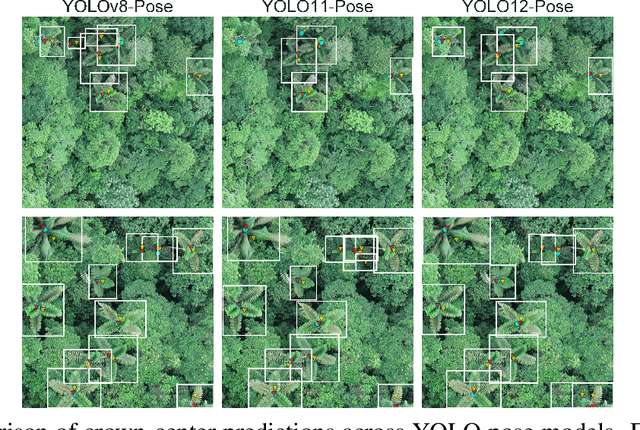
Accurate mapping of individual trees is essential for ecological monitoring and forest management. Orthomosaic imagery from unmanned aerial vehicles (UAVs) is widely used, but stitching artifacts and heavy preprocessing limit its suitability for field deployment. This study explores the use of raw UAV imagery for palm detection and crown-center localization in tropical forests. Two research questions are addressed: (1) how detection performance varies across orthomosaic and raw imagery, including within-domain and cross-domain transfer, and (2) to what extent crown-center annotations improve localization accuracy beyond bounding-box centroids. Using state-of-the-art detectors and keypoint models, we show that raw imagery yields superior performance in deployment-relevant scenarios, while orthomosaics retain value for robust cross-domain generalization. Incorporating crown-center annotations in training further improves localization and provides precise tree positions for downstream ecological analyses. These findings offer practical guidance for UAV-based biodiversity and conservation monitoring.
Detection and Geographic Localization of Natural Objects in the Wild: A Case Study on Palms
Feb 18, 2025



Palms are ecologically and economically indicators of tropical forest health, biodiversity, and human impact that support local economies and global forest product supply chains. While palm detection in plantations is well-studied, efforts to map naturally occurring palms in dense forests remain limited by overlapping crowns, uneven shading, and heterogeneous landscapes. We develop PRISM (Processing, Inference, Segmentation, and Mapping), a flexible pipeline for detecting and localizing palms in dense tropical forests using large orthomosaic images. Orthomosaics are created from thousands of aerial images and spanning several to hundreds of gigabytes. Our contributions are threefold. First, we construct a large UAV-derived orthomosaic dataset collected across 21 ecologically diverse sites in western Ecuador, annotated with 8,830 bounding boxes and 5,026 palm center points. Second, we evaluate multiple state-of-the-art object detectors based on efficiency and performance, integrating zero-shot SAM 2 as the segmentation backbone, and refining the results for precise geographic mapping. Third, we apply calibration methods to align confidence scores with IoU and explore saliency maps for feature explainability. Though optimized for palms, PRISM is adaptable for identifying other natural objects, such as eastern white pines. Future work will explore transfer learning for lower-resolution datasets (0.5 to 1m).
xSRL: Safety-Aware Explainable Reinforcement Learning -- Safety as a Product of Explainability
Dec 26, 2024



Reinforcement learning (RL) has shown great promise in simulated environments, such as games, where failures have minimal consequences. However, the deployment of RL agents in real-world systems such as autonomous vehicles, robotics, UAVs, and medical devices demands a higher level of safety and transparency, particularly when facing adversarial threats. Safe RL algorithms have been developed to address these concerns by optimizing both task performance and safety constraints. However, errors are inevitable, and when they occur, it is essential that the RL agents can also explain their actions to human operators. This makes trust in the safety mechanisms of RL systems crucial for effective deployment. Explainability plays a key role in building this trust by providing clear, actionable insights into the agent's decision-making process, ensuring that safety-critical decisions are well understood. While machine learning (ML) has seen significant advances in interpretability and visualization, explainability methods for RL remain limited. Current tools fail to address the dynamic, sequential nature of RL and its needs to balance task performance with safety constraints over time. The re-purposing of traditional ML methods, such as saliency maps, is inadequate for safety-critical RL applications where mistakes can result in severe consequences. To bridge this gap, we propose xSRL, a framework that integrates both local and global explanations to provide a comprehensive understanding of RL agents' behavior. xSRL also enables developers to identify policy vulnerabilities through adversarial attacks, offering tools to debug and patch agents without retraining. Our experiments and user studies demonstrate xSRL's effectiveness in increasing safety in RL systems, making them more reliable and trustworthy for real-world deployment. Code is available at https://github.com/risal-shefin/xSRL.
Real-Time Localization and Bimodal Point Pattern Analysis of Palms Using UAV Imagery
Oct 14, 2024



Understanding the spatial distribution of palms within tropical forests is essential for effective ecological monitoring, conservation strategies, and the sustainable integration of natural forest products into local and global supply chains. However, the analysis of remotely sensed data in these environments faces significant challenges, such as overlapping palm and tree crowns, uneven shading across the canopy surface, and the heterogeneous nature of the forest landscapes, which often affect the performance of palm detection and segmentation algorithms. To overcome these issues, we introduce PalmDSNet, a deep learning framework for real-time detection, segmentation, and counting of canopy palms. Additionally, we employ a bimodal reproduction algorithm that simulates palm spatial propagation to further enhance the understanding of these point patterns using PalmDSNet's results. We used UAV-captured imagery to create orthomosaics from 21 sites across western Ecuadorian tropical forests, covering a gradient from the everwet Choc\'o forests near Colombia to the drier forests of southwestern Ecuador. Expert annotations were used to create a comprehensive dataset, including 7,356 bounding boxes on image patches and 7,603 palm centers across five orthomosaics, encompassing a total area of 449 hectares. By combining PalmDSNet with the bimodal reproduction algorithm, which optimizes parameters for both local and global spatial variability, we effectively simulate the spatial distribution of palms in diverse and dense tropical environments, validating its utility for advanced applications in tropical forest monitoring and remote sensing analysis.
ASGM-KG: Unveiling Alluvial Gold Mining Through Knowledge Graphs
Aug 16, 2024



Artisanal and Small-Scale Gold Mining (ASGM) is a low-cost yet highly destructive mining practice, leading to environmental disasters across the world's tropical watersheds. The topic of ASGM spans multiple domains of research and information, including natural and social systems, and knowledge is often atomized across a diversity of media and documents. We therefore introduce a knowledge graph (ASGM-KG) that consolidates and provides crucial information about ASGM practices and their environmental effects. The current version of ASGM-KG consists of 1,899 triples extracted using a large language model (LLM) from documents and reports published by both non-governmental and governmental organizations. These documents were carefully selected by a group of tropical ecologists with expertise in ASGM. This knowledge graph was validated using two methods. First, a small team of ASGM experts reviewed and labeled triples as factual or non-factual. Second, we devised and applied an automated factual reduction framework that relies on a search engine and an LLM for labeling triples. Our framework performs as well as five baselines on a publicly available knowledge graph and achieves over 90 accuracy on our ASGM-KG validated by domain experts. ASGM-KG demonstrates an advancement in knowledge aggregation and representation for complex, interdisciplinary environmental crises such as ASGM.
PalmProbNet: A Probabilistic Approach to Understanding Palm Distributions in Ecuadorian Tropical Forest via Transfer Learning
Mar 05, 2024Palms play an outsized role in tropical forests and are important resources for humans and wildlife. A central question in tropical ecosystems is understanding palm distribution and abundance. However, accurately identifying and localizing palms in geospatial imagery presents significant challenges due to dense vegetation, overlapping canopies, and variable lighting conditions in mixed-forest landscapes. Addressing this, we introduce PalmProbNet, a probabilistic approach utilizing transfer learning to analyze high-resolution UAV-derived orthomosaic imagery, enabling the detection of palm trees within the dense canopy of the Ecuadorian Rainforest. This approach represents a substantial advancement in automated palm detection, effectively pinpointing palm presence and locality in mixed tropical rainforests. Our process begins by generating an orthomosaic image from UAV images, from which we extract and label palm and non-palm image patches in two distinct sizes. These patches are then used to train models with an identical architecture, consisting of an unaltered pre-trained ResNet-18 and a Multilayer Perceptron (MLP) with specifically trained parameters. Subsequently, PalmProbNet employs a sliding window technique on the landscape orthomosaic, using both small and large window sizes to generate a probability heatmap. This heatmap effectively visualizes the distribution of palms, showcasing the scalability and adaptability of our approach in various forest densities. Despite the challenging terrain, our method demonstrated remarkable performance, achieving an accuracy of 97.32% and a Cohen's kappa of 94.59% in testing.
Semi-supervised Change Detection of Small Water Bodies Using RGB and Multispectral Images in Peruvian Rainforests
Jun 19, 2022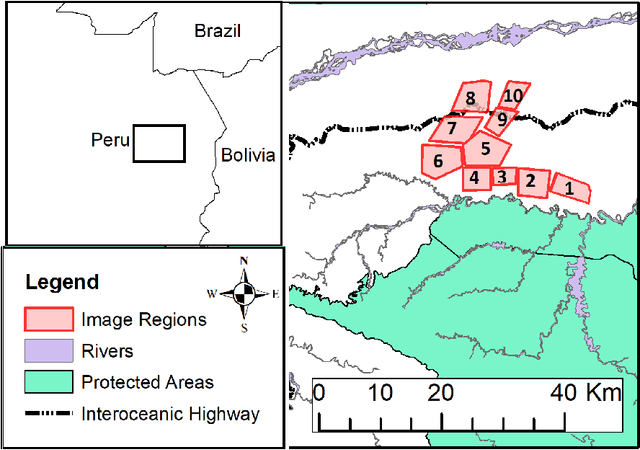
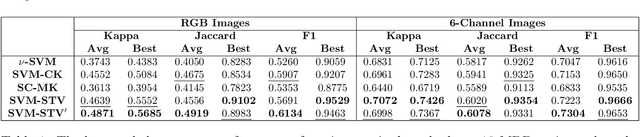
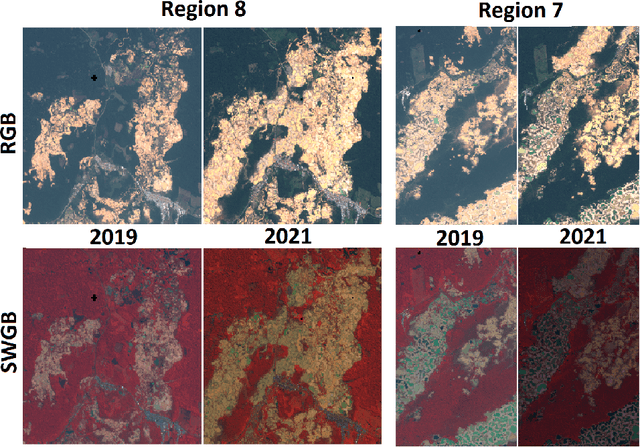
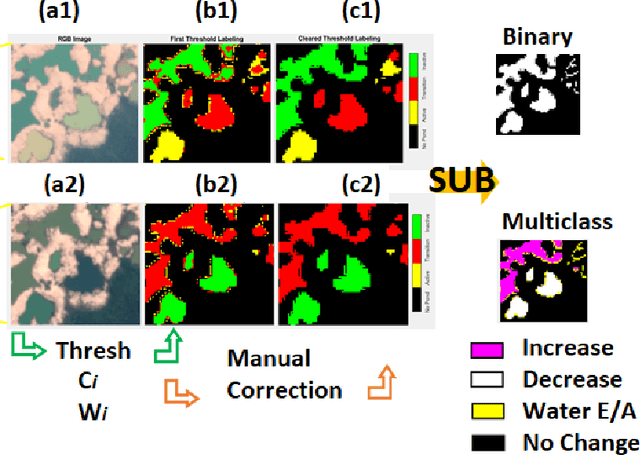
Artisanal and Small-scale Gold Mining (ASGM) is an important source of income for many households, but it can have large social and environmental effects, especially in rainforests of developing countries. The Sentinel-2 satellites collect multispectral images that can be used for the purpose of detecting changes in water extent and quality which indicates the locations of mining sites. This work focuses on the recognition of ASGM activities in Peruvian Amazon rainforests. We tested several semi-supervised classifiers based on Support Vector Machines (SVMs) to detect the changes of water bodies from 2019 to 2021 in the Madre de Dios region, which is one of the global hotspots of ASGM activities. Experiments show that SVM-based models can achieve reasonable performance for both RGB (using Cohen's $\kappa$ 0.49) and 6-channel images (using Cohen's $\kappa$ 0.71) with very limited annotations. The efficacy of incorporating Lab color space for change detection is analyzed as well.
Deep Reinforcement Learning for Adaptive Exploration of Unknown Environments
May 04, 2021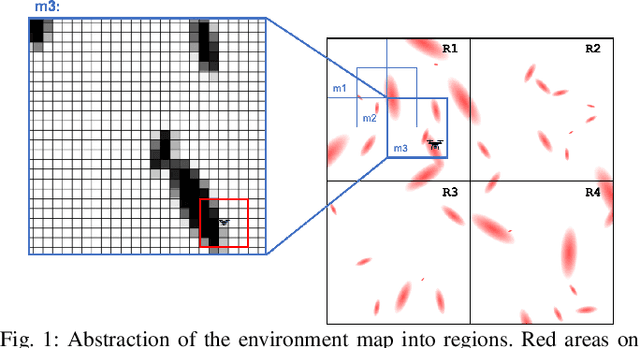
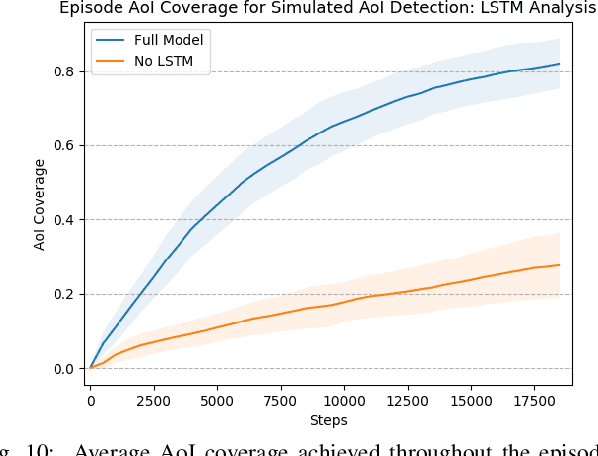
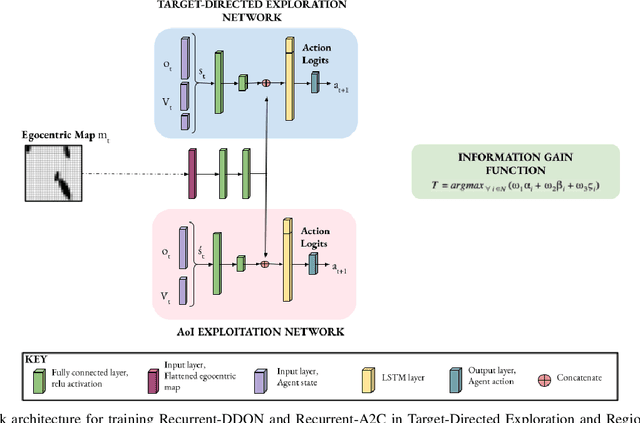
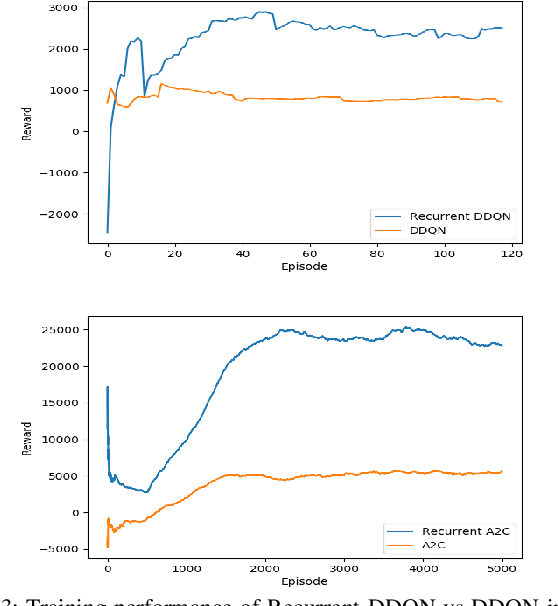
Performing autonomous exploration is essential for unmanned aerial vehicles (UAVs) operating in unknown environments. Often, these missions start with building a map for the environment via pure exploration and subsequently using (i.e. exploiting) the generated map for downstream navigation tasks. Accomplishing these navigation tasks in two separate steps is not always possible or even disadvantageous for UAVs deployed in outdoor and dynamically changing environments. Current exploration approaches either use a priori human-generated maps or use heuristics such as frontier-based exploration. Other approaches use learning but focus only on learning policies for specific tasks by either using sample inefficient random exploration or by making impractical assumptions about full map availability. In this paper, we develop an adaptive exploration approach to trade off between exploration and exploitation in one single step for UAVs searching for areas of interest (AoIs) in unknown environments using Deep Reinforcement Learning (DRL). The proposed approach uses a map segmentation technique to decompose the environment map into smaller, tractable maps. Then, a simple information gain function is repeatedly computed to determine the best target region to search during each iteration of the process. DDQN and A2C algorithms are extended with a stack of LSTM layers and trained to generate optimal policies for the exploration and exploitation, respectively. We tested our approach in 3 different tasks against 4 baselines. The results demonstrate that our proposed approach is capable of navigating through randomly generated environments and covering more AoI in less time steps compared to the baselines.
Robustness-Driven Exploration with Probabilistic Metric Temporal Logic
Dec 03, 2019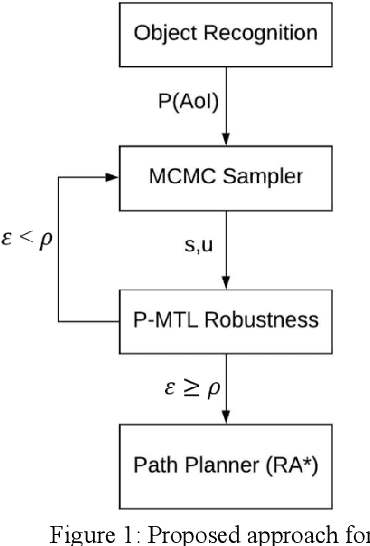
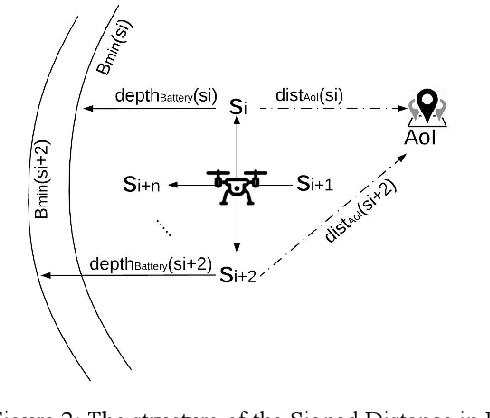
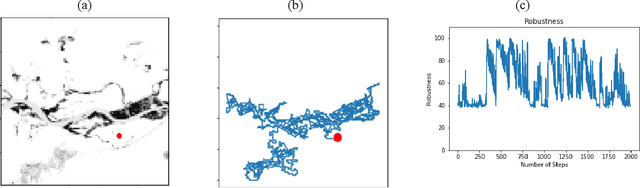
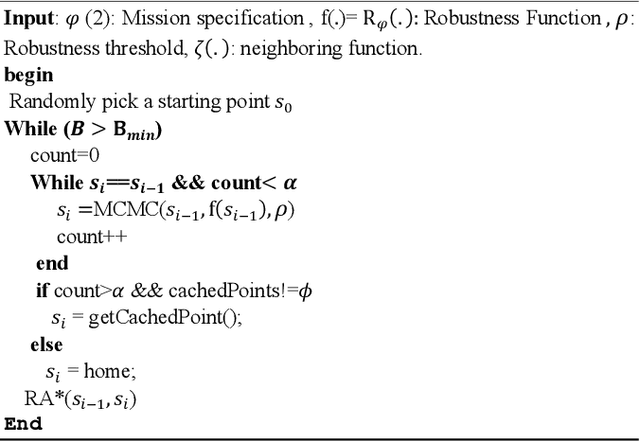
The ability to perform autonomous exploration is essential for unmanned aerial vehicles (UAV) operating in unstructured or unknown environments where it is hard or even impossible to describe the environment beforehand. However, algorithms for autonomous exploration often focus on optimizing time and coverage in a greedy fashion. That type of exploration can collect irrelevant data and wastes time navigating areas with no important information. In this paper, we propose a method for exploiting the discovered knowledge about the environment while exploring it by relying on a theory of robustness based on Probabilistic Metric Temporal Logic (P-MTL) as applied to offline verification and online control of hybrid systems. By maximizing the satisfaction of the predefined P-MTL specifications of the exploration problem, the robustness values guide the UAV towards areas with more interesting information to gain. We use Markov Chain Monte Carlo to solve the P-MTL constraints. We demonstrate the effectiveness of the proposed approach by simulating autonomous exploration over Amazonian rainforest where our approach is used to detect areas occupied by illegal Artisanal Small-scale Gold Mining (ASGM) activities. The results show that our approach outperform a greedy exploration approach (Autonomous Exploration Planner) by 38% in terms of ASGM coverage.