 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Convex Optimization with Unbounded Memory
Oct 18, 2022



Online convex optimization (OCO) is a widely used framework in online learning. In each round, the learner chooses a decision in some convex set and an adversary chooses a convex loss function, and then the learner suffers the loss associated with their chosen decision. However, in many of the motivating applications the loss of the learner depends not only on the current decision but on the entire history of decisions until that point. The OCO framework and existing generalizations thereof fail to capture this. In this work we introduce a generalization of the OCO framework, ``Online Convex Optimization with Unbounded Memory'', that captures long-term dependence on past decisions. We introduce the notion of $p$-effective memory capacity, $H_p$, that quantifies the maximum influence of past decisions on current losses. We prove a $O(\sqrt{H_1 T})$ policy regret bound and a stronger $O(\sqrt{H_p T})$ policy regret bound under mild additional assumptions. These bounds are optimal in terms of their dependence on the time horizon $T$. We show the broad applicability of our framework by using it to derive regret bounds, and to simplify existing regret bound derivations, for a variety of online learning problems including an online variant of performative prediction and online linear control.
Modeling Content Creator Incentives on Algorithm-Curated Platforms
Jun 27, 2022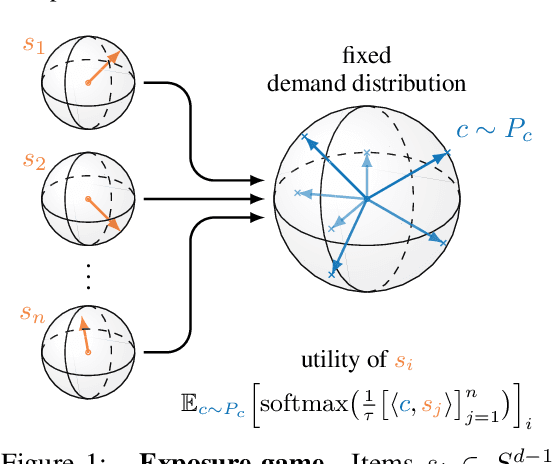

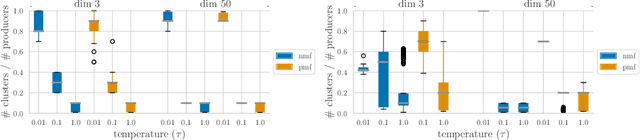
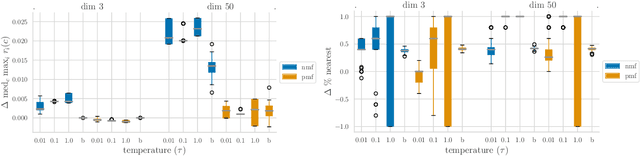
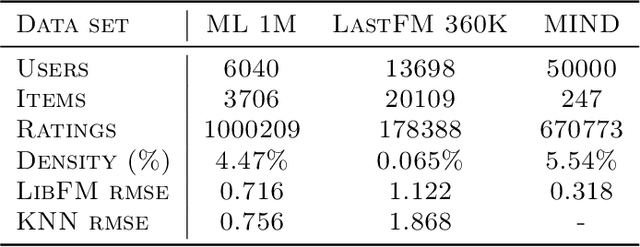
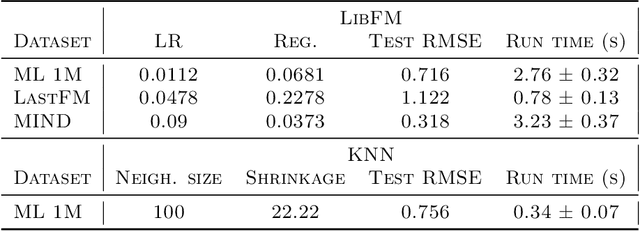
Content creators compete for user attention. Their reach crucially depends on algorithmic choices made by developers on online platforms. To maximize exposure, many creators adapt strategically, as evidenced by examples like the sprawling search engine optimization industry. This begets competition for the finite user attention pool. We formalize these dynamics in what we call an exposure game, a model of incentives induced by algorithms including modern factorization and (deep) two-tower architectures. We prove that seemingly innocuous algorithmic choices -- e.g., non-negative vs. unconstrained factorization -- significantly affect the existence and character of (Nash) equilibria in exposure games. We proffer use of creator behavior models like ours for an (ex-ante) pre-deployment audit. Such an audit can identify misalignment between desirable and incentivized content, and thus complement post-hoc measures like content filtering and moderation. To this end, we propose tools for numerically finding equilibria in exposure games, and illustrate results of an audit on the MovieLens and LastFM datasets. Among else, we find that the strategically produced content exhibits strong dependence between algorithmic exploration and content diversity, and between model expressivity and bias towards gender-based user and creator groups.
Multi-learner risk reduction under endogenous participation dynamics
Jun 06, 2022
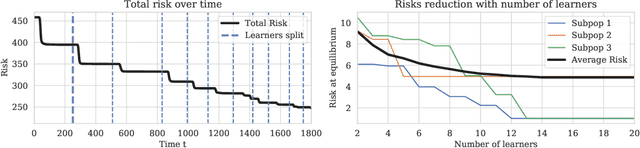
Prediction systems face exogenous and endogenous distribution shift -- the world constantly changes, and the predictions the system makes change the environment in which it operates. For example, a music recommender observes exogeneous changes in the user distribution as different communities have increased access to high speed internet. If users under the age of 18 enjoy their recommendations, the proportion of the user base comprised of those under 18 may endogeneously increase. Most of the study of endogenous shifts has focused on the single decision-maker setting, where there is one learner that users either choose to use or not. This paper studies participation dynamics between sub-populations and possibly many learners. We study the behavior of systems with \emph{risk-reducing} learners and sub-populations. A risk-reducing learner updates their decision upon observing a mixture distribution of the sub-populations $\mathcal{D}$ in such a way that it decreases the risk of the learner on that mixture. A risk reducing sub-population updates its apportionment amongst learners in a way which reduces its overall loss. Previous work on the single learner case shows that myopic risk minimization can result in high overall loss~\citep{perdomo2020performative, miller2021outside} and representation disparity~\citep{hashimoto2018fairness, zhang2019group}. Our work analyzes the outcomes of multiple myopic learners and market forces, often leading to better global loss and less representation disparity.
Preference Dynamics Under Personalized Recommendations
May 25, 2022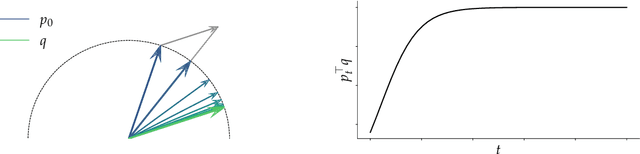
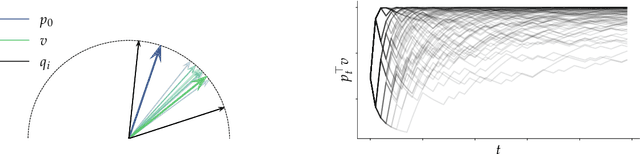
Many projects (both practical and academic) have designed algorithms to match users to content they will enjoy under the assumption that user's preferences and opinions do not change with the content they see. Evidence suggests that individuals' preferences are directly shaped by what content they see -- radicalization, rabbit holes, polarization, and boredom are all example phenomena of preferences affected by content. Polarization in particular can occur even in ecosystems with "mass media," where no personalization takes place, as recently explored in a natural model of preference dynamics by~\citet{hkazla2019geometric} and~\citet{gaitonde2021polarization}. If all users' preferences are drawn towards content they already like, or are repelled from content they already dislike, uniform consumption of media leads to a population of heterogeneous preferences converging towards only two poles. In this work, we explore whether some phenomenon akin to polarization occurs when users receive \emph{personalized} content recommendations. We use a similar model of preference dynamics, where an individual's preferences move towards content the consume and enjoy, and away from content they consume and dislike. We show that standard user reward maximization is an almost trivial goal in such an environment (a large class of simple algorithms will achieve only constant regret). A more interesting objective, then, is to understand under what conditions a recommendation algorithm can ensure stationarity of user's preferences. We show how to design a content recommendations which can achieve approximate stationarity, under mild conditions on the set of available content, when a user's preferences are known, and how one can learn enough about a user's preferences to implement such a strategy even when user preferences are initially unknown.
Reward Reports for Reinforcement Learning
Apr 25, 2022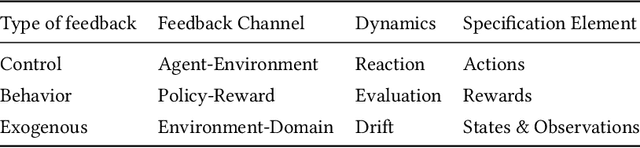
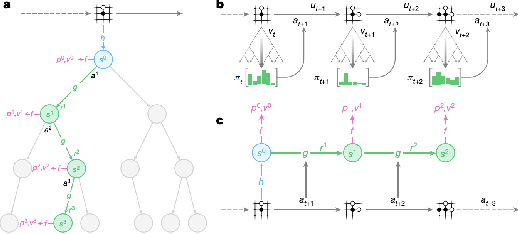
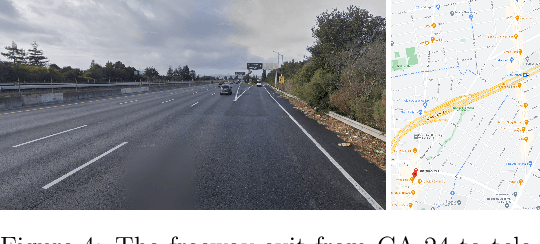
The desire to build good systems in the face of complex societal effects requires a dynamic approach towards equity and access. Recent approaches to machine learning (ML) documentation have demonstrated the promise of discursive frameworks for deliberation about these complexities. However, these developments have been grounded in a static ML paradigm, leaving the role of feedback and post-deployment performance unexamined. Meanwhile, recent work in reinforcement learning design has shown that the effects of optimization objectives on the resultant system behavior can be wide-ranging and unpredictable. In this paper we sketch a framework for documenting deployed learning systems, which we call Reward Reports. Taking inspiration from various contributions to the technical literature on reinforcement learning, we outline Reward Reports as living documents that track updates to design choices and assumptions behind what a particular automated system is optimizing for. They are intended to track dynamic phenomena arising from system deployment, rather than merely static properties of models or data. After presenting the elements of a Reward Report, we provide three examples: DeepMind's MuZero, MovieLens, and a hypothetical deployment of a Project Flow traffic control policy.
Choices, Risks, and Reward Reports: Charting Public Policy for Reinforcement Learning Systems
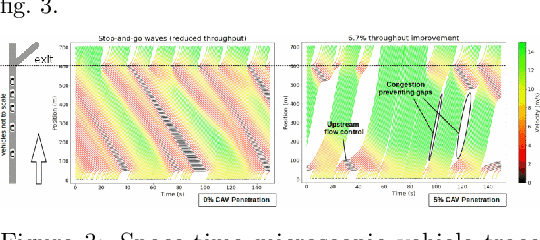
Feb 11, 2022In the long term, reinforcement learning (RL) is considered by many AI theorists to be the most promising path to artificial general intelligence. This places RL practitioners in a position to design systems that have never existed before and lack prior documentation in law and policy. Public agencies could intervene on complex dynamics that were previously too opaque to deliberate about, and long-held policy ambitions would finally be made tractable. In this whitepaper we illustrate this potential and how it might be technically enacted in the domains of energy infrastructure, social media recommender systems, and transportation. Alongside these unprecedented interventions come new forms of risk that exacerbate the harms already generated by standard machine learning tools. We correspondingly present a new typology of risks arising from RL design choices, falling under four categories: scoping the horizon, defining rewards, pruning information, and training multiple agents. Rather than allowing RL systems to unilaterally reshape human domains, policymakers need new mechanisms for the rule of reason, foreseeability, and interoperability that match the risks these systems pose. We argue that criteria for these choices may be drawn from emerging subfields within antitrust, tort, and administrative law. It will then be possible for courts, federal and state agencies, and non-governmental organizations to play more active roles in RL specification and evaluation. Building on the "model cards" and "datasheets" frameworks proposed by Mitchell et al. and Gebru et al., we argue the need for Reward Reports for AI systems. Reward Reports are living documents for proposed RL deployments that demarcate design choices.
* 60 pages
Quantifying Availability and Discovery in Recommender Systems via Stochastic Reachability
Jun 30, 2021
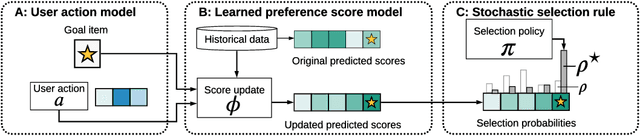
In this work, we consider how preference models in interactive recommendation systems determine the availability of content and users' opportunities for discovery. We propose an evaluation procedure based on stochastic reachability to quantify the maximum probability of recommending a target piece of content to an user for a set of allowable strategic modifications. This framework allows us to compute an upper bound on the likelihood of recommendation with minimal assumptions about user behavior. Stochastic reachability can be used to detect biases in the availability of content and diagnose limitations in the opportunities for discovery granted to users. We show that this metric can be computed efficiently as a convex program for a variety of practical settings, and further argue that reachability is not inherently at odds with accuracy. We demonstrate evaluations of recommendation algorithms trained on large datasets of explicit and implicit ratings. Our results illustrate how preference models, selection rules, and user interventions impact reachability and how these effects can be distributed unevenly.
Axes for Sociotechnical Inquiry in AI Research
Apr 26, 2021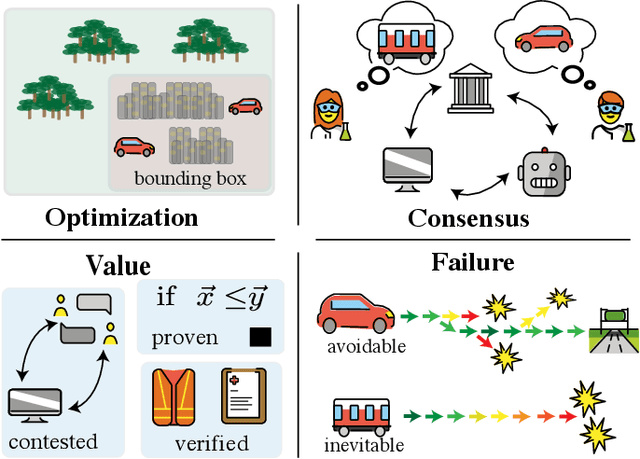
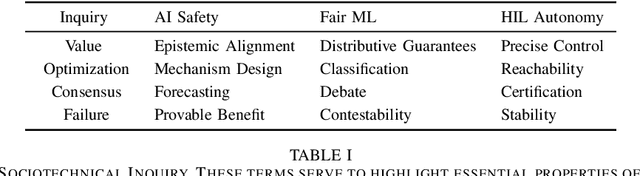
The development of artificial intelligence (AI) technologies has far exceeded the investigation of their relationship with society. Sociotechnical inquiry is needed to mitigate the harms of new technologies whose potential impacts remain poorly understood. To date, subfields of AI research develop primarily individual views on their relationship with sociotechnics, while tools for external investigation, comparison, and cross-pollination are lacking. In this paper, we propose four directions for inquiry into new and evolving areas of technological development: value--what progress and direction does a field promote, optimization--how the defined system within a problem formulation relates to broader dynamics, consensus--how agreement is achieved and who is included in building it, and failure--what methods are pursued when the problem specification is found wanting. The paper provides a lexicon for sociotechnical inquiry and illustrates it through the example of consumer drone technology.
AI Development for the Public Interest: From Abstraction Traps to Sociotechnical Risks
Feb 04, 2021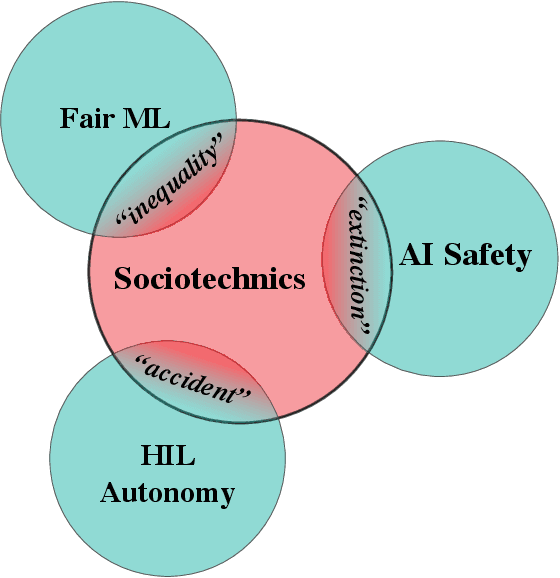
Despite interest in communicating ethical problems and social contexts within the undergraduate curriculum to advance Public Interest Technology (PIT) goals, interventions at the graduate level remain largely unexplored. This may be due to the conflicting ways through which distinct Artificial Intelligence (AI) research tracks conceive of their interface with social contexts. In this paper we track the historical emergence of sociotechnical inquiry in three distinct subfields of AI research: AI Safety, Fair Machine Learning (Fair ML) and Human-in-the-Loop (HIL) Autonomy. We show that for each subfield, perceptions of PIT stem from the particular dangers faced by past integration of technical systems within a normative social order. We further interrogate how these histories dictate the response of each subfield to conceptual traps, as defined in the Science and Technology Studies literature. Finally, through a comparative analysis of these currently siloed fields, we present a roadmap for a unified approach to sociotechnical graduate pedagogy in AI.
Towards Robust Data-Driven Control Synthesis for Nonlinear Systems with Actuation Uncertainty
Nov 21, 2020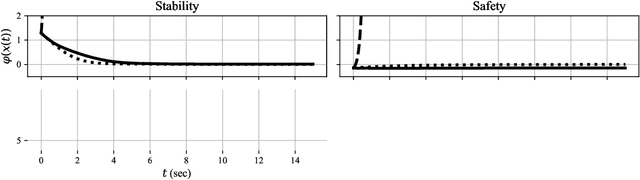
Modern nonlinear control theory seeks to endow systems with properties such as stability and safety, and has been deployed successfully across various domains. Despite this success, model uncertainty remains a significant challenge in ensuring that model-based controllers transfer to real world systems. This paper develops a data-driven approach to robust control synthesis in the presence of model uncertainty using Control Certificate Functions (CCFs), resulting in a convex optimization based controller for achieving properties like stability and safety. An important benefit of our framework is nuanced data-dependent guarantees, which in principle can yield sample-efficient data collection approaches that need not fully determine the input-to-state relationship. This work serves as a starting point for addressing important questions at the intersection of nonlinear control theory and non-parametric learning, both theoretical and in application. We validate the proposed method in simulation with an inverted pendulum in multiple experimental configurations.