 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFiReFly: Fair Distributed Receding Horizon Planning for Multiple UAVs
Aug 20, 2025



We propose injecting notions of fairness into multi-robot motion planning. When robots have competing interests, it is important to optimize for some kind of fairness in their usage of resources. In this work, we explore how the robots' energy expenditures might be fairly distributed among them, while maintaining mission success. We formulate a distributed fair motion planner and integrate it with safe controllers in a algorithm called FiReFly. For simulated reach-avoid missions, FiReFly produces fairer trajectories and improves mission success rates over a non-fair planner. We find that real-time performance is achievable up to 15 UAVs, and that scaling up to 50 UAVs is possible with trade-offs between runtime and fairness improvements.
Fair-CoPlan: Negotiated Flight Planning with Fair Deconfliction for Urban Air Mobility
Aug 20, 2025



Urban Air Mobility (UAM) is an emerging transportation paradigm in which Uncrewed Aerial Systems (UAS) autonomously transport passengers and goods in cities. The UAS have different operators with different, sometimes competing goals, yet must share the airspace. We propose a negotiated, semi-distributed flight planner that optimizes UAS' flight lengths {\em in a fair manner}. Current flight planners might result in some UAS being given disproportionately shorter flight paths at the expense of others. We introduce Fair-CoPlan, a planner in which operators and a Provider of Service to the UAM (PSU) together compute \emph{fair} flight paths. Fair-CoPlan has three steps: First, the PSU constrains take-off and landing choices for flights based on capacity at and around vertiports. Then, operators plan independently under these constraints. Finally, the PSU resolves any conflicting paths, optimizing for path length fairness. By fairly spreading the cost of deconfliction Fair-CoPlan encourages wider participation in UAM, ensures safety of the airspace and the areas below it, and promotes greater operator flexibility. We demonstrate Fair-CoPlan through simulation experiments and find fairer outcomes than a non-fair planner with minor delays as a trade-off.
Differentiable Inference of Temporal Logic Formulas
Aug 10, 2022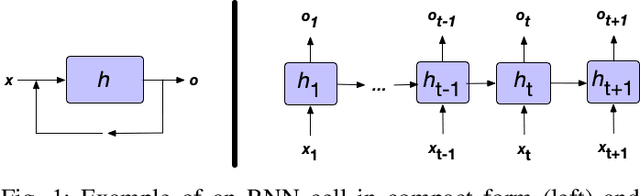
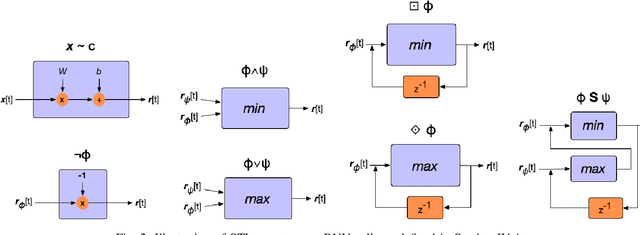
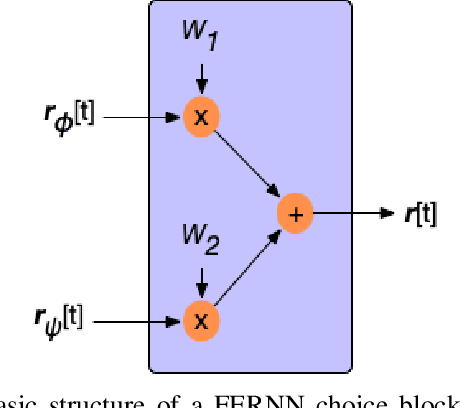
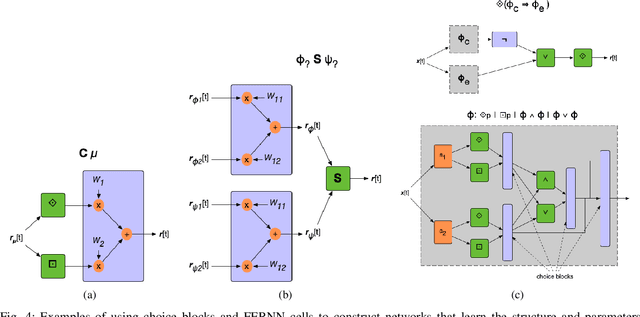
We demonstrate the first Recurrent Neural Network architecture for learning Signal Temporal Logic formulas, and present the first systematic comparison of formula inference methods. Legacy systems embed much expert knowledge which is not explicitly formalized. There is great interest in learning formal specifications that characterize the ideal behavior of such systems -- that is, formulas in temporal logic that are satisfied by the system's output signals. Such specifications can be used to better understand the system's behavior and improve design of its next iteration. Previous inference methods either assumed certain formula templates, or did a heuristic enumeration of all possible templates. This work proposes a neural network architecture that infers the formula structure via gradient descent, eliminating the need for imposing any specific templates. It combines learning of formula structure and parameters in one optimization. Through systematic comparison, we demonstrate that this method achieves similar or better mis-classification rates (MCR) than enumerative and lattice methods. We also observe that different formulas can achieve similar MCR, empirically demonstrating the under-determinism of the problem of temporal logic inference.
Resilience in multi-robot multi-target tracking with unknown number of targets through reconfiguration
Apr 15, 2020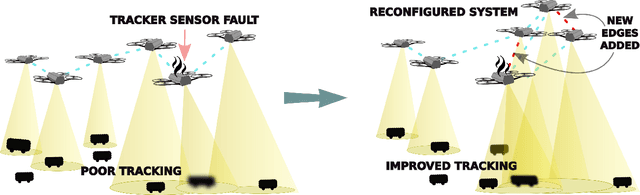
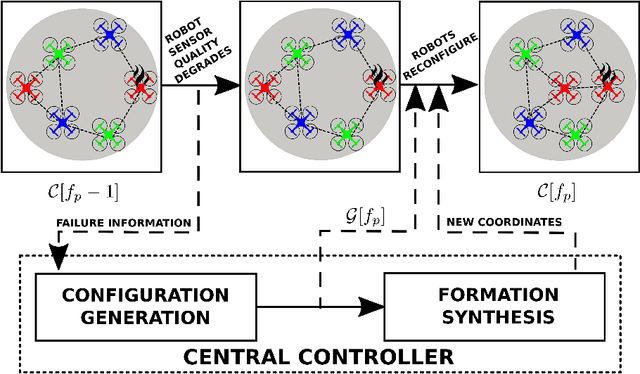
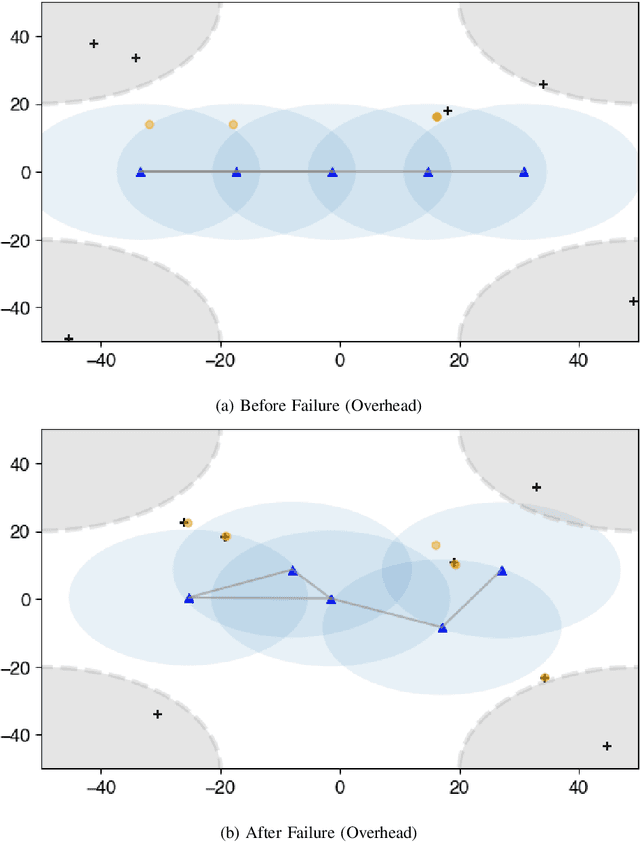
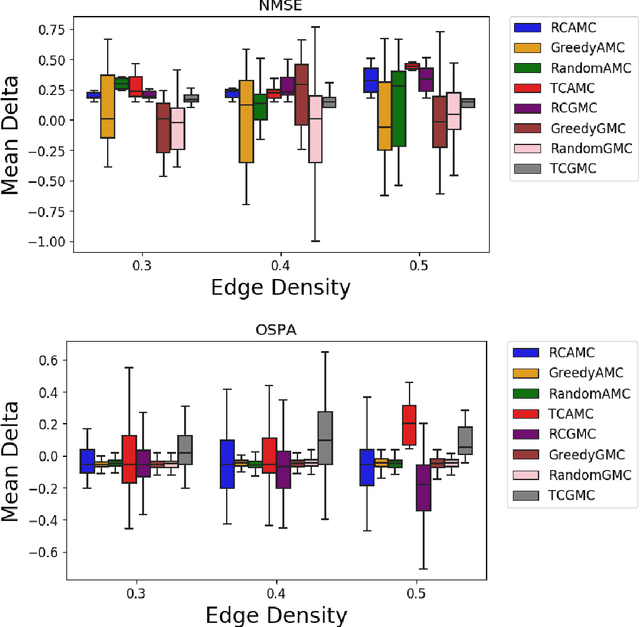
We address the problem of maintaining resource availability in a networked multi-robot team performing distributed tracking of unknown number of targets in an environment of interest. Based on our model, robots are equipped with sensing and computational resources enabling them to cooperatively track a set of targets in an environment using a distributed Probability Hypothesis Density (PHD) filter. We use the trace of a robot's sensor measurement noise covariance matrix to quantify its sensing quality. While executing the tracking task, if a robot experiences sensor quality degradation, then robot team's communication network is reconfigured such that the robot with the faulty sensor may share information with other robots to improve the team's target tracking ability without enforcing a large change in the number of active communication links. A central system which monitors the team executes all the network reconfiguration computations. We consider two different PHD fusion methods in this paper and propose four different Mixed Integer Semi-Definite Programming (MISDP) formulations (two formulations for each PHD fusion method) to accomplish our objective. All four MISDP formulations are validated in simulation.
Resilience in multi-robot target tracking through reconfiguration
Oct 03, 2019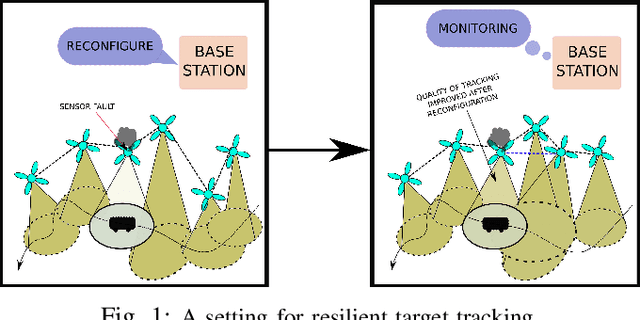
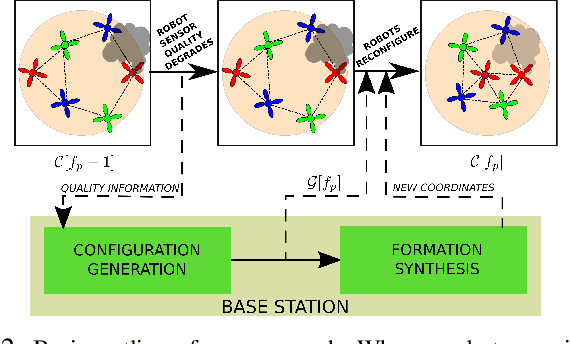
We address the problem of maintaining resource availability in a networked multi-robot system performing distributed target tracking. In our model, robots are equipped with sensing and computational resources enabling them to track a target's position using a Distributed Kalman Filter (DKF). We use the trace of each robot's sensor measurement noise covariance matrix as a measure of sensing quality. When a robot's sensing quality deteriorates, the system's communication graph is modified by adding edges such that the robot with deteriorating sensor quality may share information with other robots to improve the team's target tracking ability. This computation is performed centrally and is designed to work without a large change in the number of active communication links. We propose two mixed integer semi-definite programming formulations (an 'agent-centric' strategy and a 'team-centric' strategy) to achieve this goal. We implement both formulations and a greedy strategy in simulation and show that the team-centric strategy outperforms the agent-centric and greedy strategies.
Predicting Individual Responses to Vasoactive Medications in Children with Septic Shock
Jan 15, 2019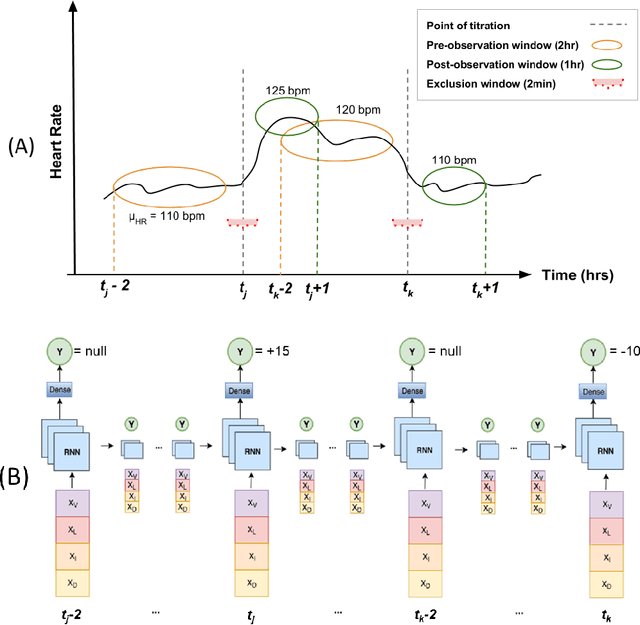
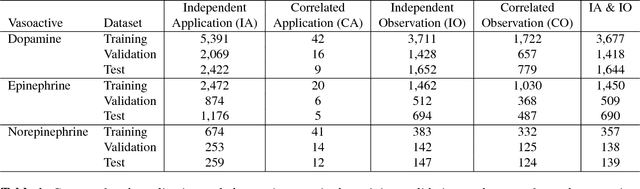
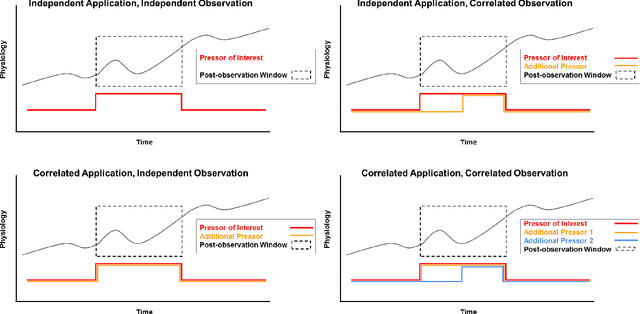
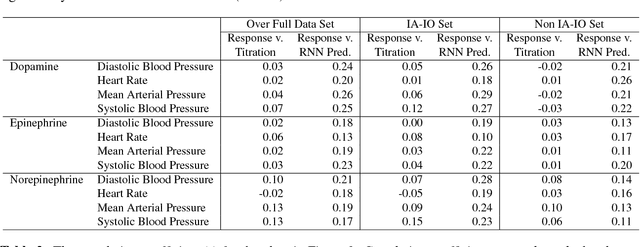
Objective: Predict individual septic children's personalized physiologic responses to vasoactive titrations by training a Recurrent Neural Network (RNN) using EMR data. Materials and Methods: This study retrospectively analyzed EMR of patients admitted to a pediatric ICU from 2009 to 2017. Data included charted time series vitals, labs, drugs, and interventions of children with septic shock treated with dopamine, epinephrine, or norepinephrine. A RNN was trained to predict responses in heart rate (HR), systolic blood pressure (SBP), diastolic blood pressure (DBP) and mean arterial pressure (MAP) to 8,640 titrations during 652 septic episodes and evaluated on a holdout set of 3,883 titrations during 254 episodes. A linear regression model using titration data as its sole input was also developed and compared to the RNN model. Evaluation methods included the correlation coefficient between actual physiologic responses and RNN predictions, mean absolute error (MAE), and area under the receiver operating characteristic curve (AUC). Results: The actual physiologic responses displayed significant variability and were more accurately predicted by the RNN model than by titration alone (r=0.20 vs r=0.05, p<0.01). The RNN showed MAE and AUC improvements over the linear model. The RNN's MAEs associated with dopamine and epinephrine were 1-3% lower than the linear regression model MAE for HR, SBP, DBP, and MAP. Across all vitals vasoactives, the RNN achieved 1-19% AUC improvement over the linear model. Conclusion: This initial attempt in pediatric critical care to predict individual physiologic responses to vasoactive dose changes in children with septic shock demonstrated an RNN model showed some improvement over a linear model. While not yet clinically applicable, further development may assist clinical administration of vasoactive medications in children with septic shock.