 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural L1 Adaptive Control of Vehicle Lateral Dynamics
May 25, 2024We address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping. Lane departure is the primary reason for half of the fatalities in road accidents, making the development of stable, adaptive and robust controllers a necessity. Traditional linear feedback controllers achieve satisfactory tracking performance, however, they exhibit unstable behavior when uncertainties are induced into the system. Any disturbance or uncertainty introduced to the steering-angle input can be catastrophic for the vehicle. Therefore, controllers must be developed to actively handle such uncertainties. In this work, we introduce a Neural L1 Adaptive controller (Neural-L1) which learns the uncertainties in the lateral error dynamics of a front-steered Ackermann vehicle and guarantees stability and robustness. Our contributions are threefold: i) We extend the theoretical results for guaranteed stability and robustness of conventional L1 Adaptive controllers to Neural-L1; ii) We implement a Neural-L1 for the lane keeping application which learns uncertainties in the dynamics accurately; iii)We evaluate the performance of Neural-L1 on a physics-based simulator, PyBullet, and conduct extensive real-world experiments with the F1TENTH platform to demonstrate superior reference trajectory tracking performance of Neural-L1 compared to other state-of-the-art controllers, in the presence of uncertainties. Our project page, including supplementary material and videos, can be found at https://mukhe027.github.io/Neural-Adaptive-Control/
System Identification and Control of Front-Steered Ackermann Vehicles through Differentiable Physics
Aug 07, 2023



In this paper, we address the problem of system identification and control of a front-steered vehicle which abides by the Ackermann geometry constraints. This problem arises naturally for on-road and off-road vehicles that require reliable system identification and basic feedback controllers for various applications such as lane keeping and way-point navigation. Traditional system identification requires expensive equipment and is time consuming. In this work we explore the use of differentiable physics for system identification and controller design and make the following contributions: i)We develop a differentiable physics simulator (DPS) to provide a method for the system identification of front-steered class of vehicles whose system parameters are learned using a gradient-based method; ii) We provide results for our gradient-based method that exhibit better sample efficiency in comparison to other gradient-free methods; iii) We validate the learned system parameters by implementing a feedback controller to demonstrate stable lane keeping performance on a real front-steered vehicle, the F1TENTH; iv) Further, we provide results exhibiting comparable lane keeping behavior for system parameters learned using our gradient-based method with lane keeping behavior of the actual system parameters of the F1TENTH.
Generalized Diffusion MRI Denoising and Super-Resolution using Swin Transformers
Mar 10, 2023Diffusion MRI is a non-invasive, in-vivo medical imaging method able to map tissue microstructure and structural connectivity of the human brain, as well as detect changes, such as brain development and injury, not visible by other clinical neuroimaging techniques. However, acquiring high signal-to-noise ratio (SNR) datasets with high angular and spatial sampling requires prohibitively long scan times, limiting usage in many important clinical settings, especially children, the elderly, and emergency patients with acute neurological disorders who might not be able to cooperate with the MRI scan without conscious sedation or general anesthesia. Here, we propose to use a Swin UNEt TRansformers (Swin UNETR) model, trained on augmented Human Connectome Project (HCP) data and conditioned on registered T1 scans, to perform generalized denoising and super-resolution of diffusion MRI invariant to acquisition parameters, patient populations, scanners, and sites. We qualitatively demonstrate super-resolution with artificially downsampled HCP data in normal adult volunteers. Our experiments on two other unrelated datasets, one of children with neurodevelopmental disorders and one of traumatic brain injury patients, show that our method demonstrates superior denoising despite wide data distribution shifts. Further improvement can be achieved via finetuning with just one additional subject. We apply our model to diffusion tensor (2nd order spherical harmonic) and higher-order spherical harmonic coefficient estimation and show results superior to current state-of-the-art methods. Our method can be used out-of-the-box or minimally finetuned to denoise and super-resolve a wide variety of diffusion MRI datasets. The code and model are publicly available at https://github.com/ucsfncl/dmri-swin.
Distributed Adaptive and Resilient Control of Multi-Robot Systems with Limited Field of View Interactions
Dec 19, 2021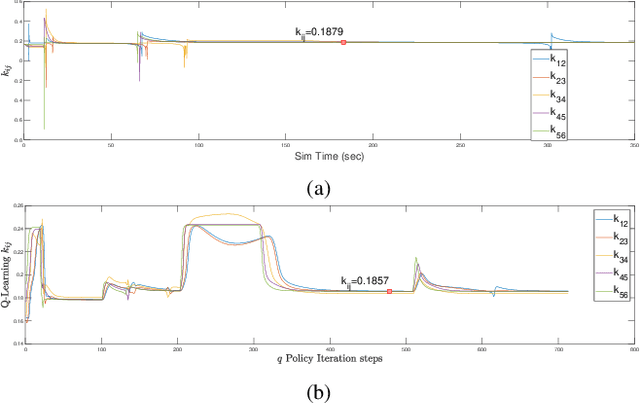
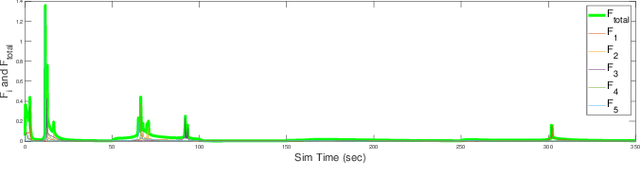
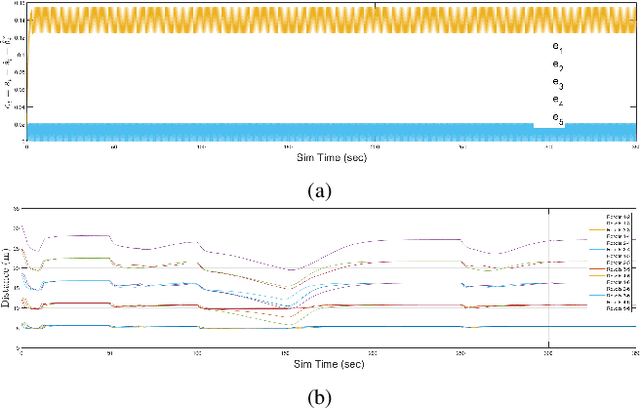
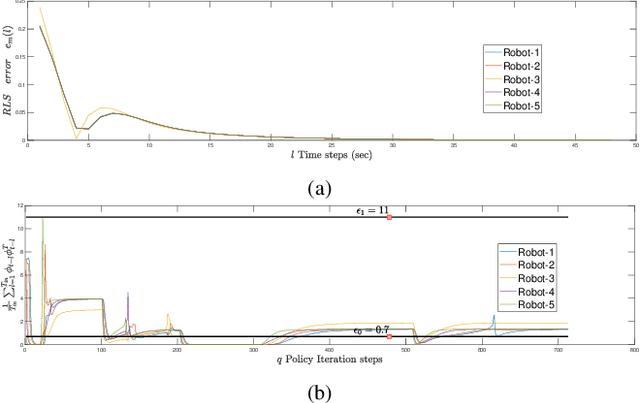
In this paper, we consider two coupled problems for distributed multi-robot systems (MRSs) coordinating with limited field of view (FOV) sensors: adaptive tuning of interaction gains and rejection of sensor attacks. First, a typical shortcoming of distributed control frameworks (e.g., potential fields) is that the overall system behavior is highly sensitive to the gain assigned to relative interactions. Second, MRSs with limited FOV sensors can be more susceptible to sensor attacks aimed at their FOVs, and therefore must be resilient to such attacks. Based on these shortcomings, we propose a comprehensive solution that combines efforts in adaptive gain tuning and attack resilience to the problem of topology control for MRSs with limited FOVs. Specifically, we first derive an adaptive gain tuning scheme based on satisfying nominal pairwise interactions, which yields a dynamic balancing of interaction strengths in a robot's neighborhood. We then model additive sensor and actuator attacks (or faults) and derive H infinity control protocols by employing a static output-feedback technique, guaranteeing bounded L2 gains of the error induced by the attack (fault) signals. Finally, simulation results using ROS Gazebo are provided to support our theoretical findings.
Experimental Validation of Stable Coordination for Multi-Robot Systems with Limited Fields of View using a PortableMulti-Robot Testbed
Sep 16, 2019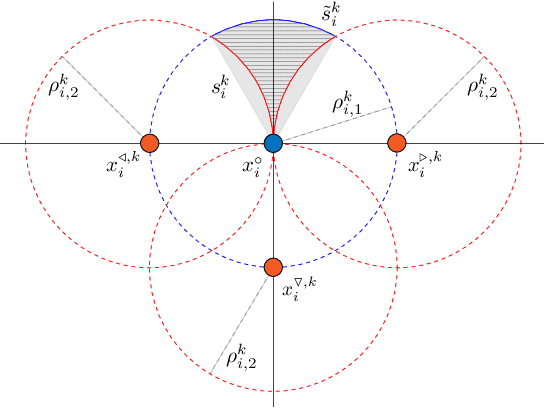
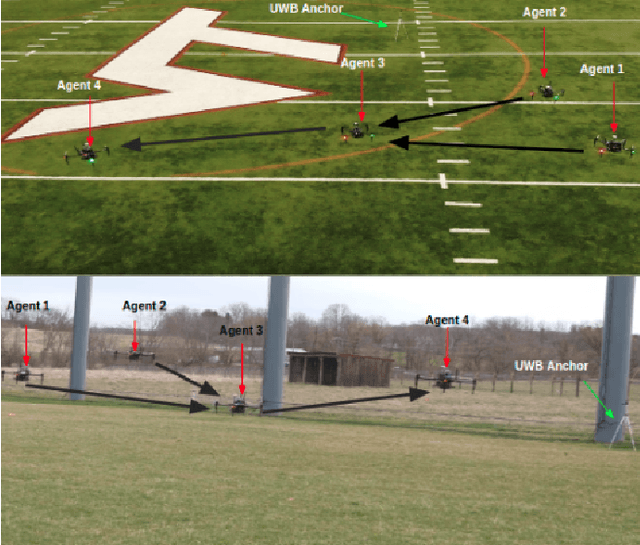
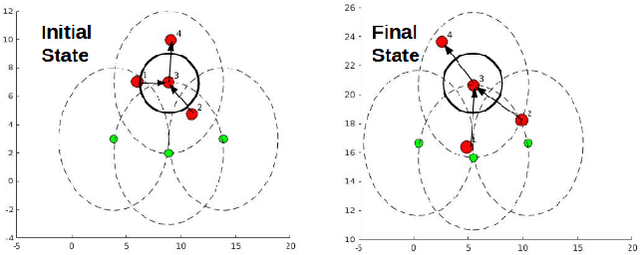
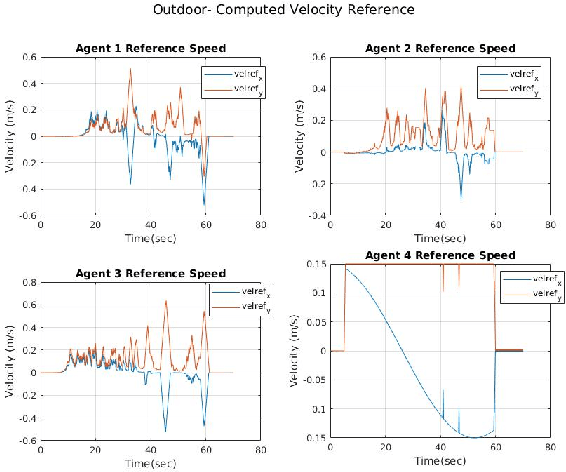
In this paper, we address the problem of stable coordinated motion in multi-robot systems with limited fields of view (FOVs). These problems arise naturally for multi-robot systems that interact based on sensing, such as our case study of multiple unmanned aerial vehicles (UAVs) each equipped with several cameras that are used for detecting neighboring UAVs. In this context, our contributions are: i) first, we derive a framework for studying stable motion and distributed topology control for multi-robot systems with limited FOVs; and ii) Then, we provide experimental results in indoor and challenging outdoor environments (e.g., with wind speeds up to 10 mph) with a team of UAVs to demonstrate the performance of the proposed control framework using a portable multi-robot experimental set-up.
Cost-Sensitive Active Learning for Intracranial Hemorrhage Detection
Sep 08, 2018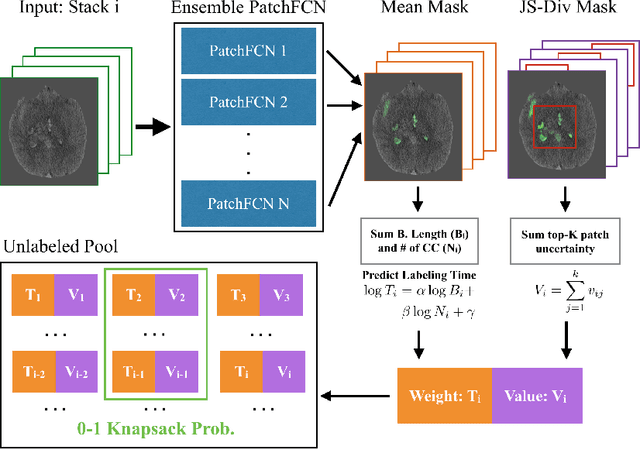

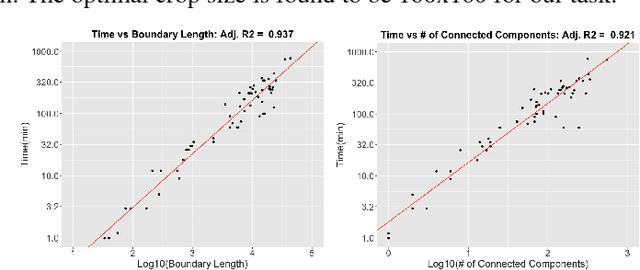
Deep learning for clinical applications is subject to stringent performance requirements, which raises a need for large labeled datasets. However, the enormous cost of labeling medical data makes this challenging. In this paper, we build a cost-sensitive active learning system for the problem of intracranial hemorrhage detection and segmentation on head computed tomography (CT). We show that our ensemble method compares favorably with the state-of-the-art, while running faster and using less memory. Moreover, our experiments are done using a substantially larger dataset than earlier papers on this topic. Since the labeling time could vary tremendously across examples, we model the labeling time and optimize the return on investment. We validate this idea by core-set selection on our large labeled dataset and by growing it with data from the wild.
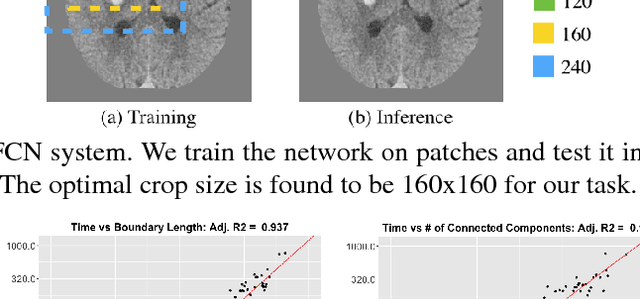
PatchFCN for Intracranial Hemorrhage Detection
Jun 08, 2018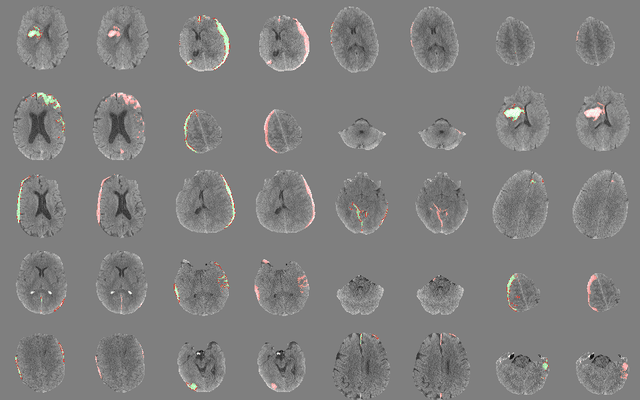
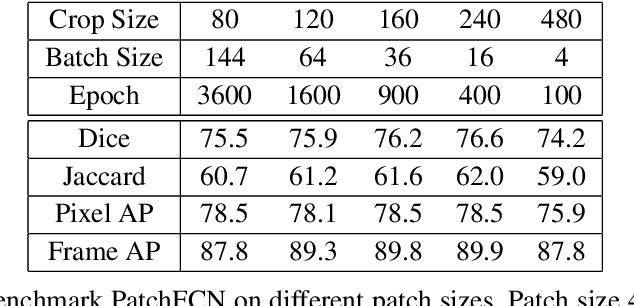
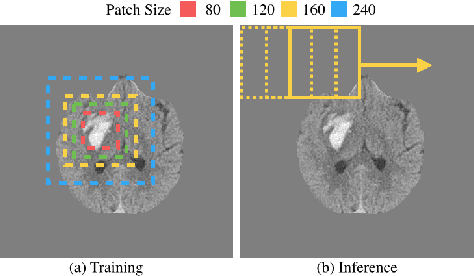
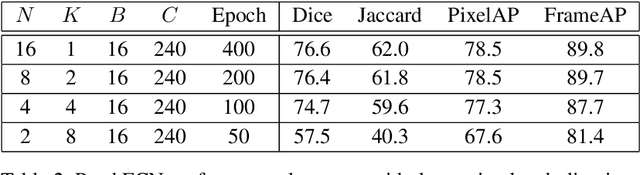
This paper studies the problem of detecting acute intracranial hemorrhage on head computed tomography (CT) scans. We formulate it as a pixel-wise labeling task of the frames that constitute a single head scan. The standard approach for this task is the fully convolutional network (FCN) which runs on the whole image at both training and test time. We propose a patch-based approach that controls the amount of context available to the FCN, based on the observation that when radiologists are interpreting CT scans, their judgment depends primarily on local cues and does not require the whole image context. To develop and validate the system, we collected a pixel-wise labeled dataset of 591 scans that covers a wide range of hemorrhage types and imaging conditions in the real world. We show that no pretraining from natural images is needed. By aggregating the pixel-wise labeling, our system is able to make region-level, frame-level, and stack-level decisions. Our final system approaches an expert radiologist performance with a high average precision (AP) of 96.5 +/- 1.3 % for hemorrhage classification on stack level while running at 23ms per frame