 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural L1 Adaptive Control of Vehicle Lateral Dynamics
May 25, 2024We address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping. Lane departure is the primary reason for half of the fatalities in road accidents, making the development of stable, adaptive and robust controllers a necessity. Traditional linear feedback controllers achieve satisfactory tracking performance, however, they exhibit unstable behavior when uncertainties are induced into the system. Any disturbance or uncertainty introduced to the steering-angle input can be catastrophic for the vehicle. Therefore, controllers must be developed to actively handle such uncertainties. In this work, we introduce a Neural L1 Adaptive controller (Neural-L1) which learns the uncertainties in the lateral error dynamics of a front-steered Ackermann vehicle and guarantees stability and robustness. Our contributions are threefold: i) We extend the theoretical results for guaranteed stability and robustness of conventional L1 Adaptive controllers to Neural-L1; ii) We implement a Neural-L1 for the lane keeping application which learns uncertainties in the dynamics accurately; iii)We evaluate the performance of Neural-L1 on a physics-based simulator, PyBullet, and conduct extensive real-world experiments with the F1TENTH platform to demonstrate superior reference trajectory tracking performance of Neural-L1 compared to other state-of-the-art controllers, in the presence of uncertainties. Our project page, including supplementary material and videos, can be found at https://mukhe027.github.io/Neural-Adaptive-Control/
Learning to Play Pursuit-Evasion with Dynamic and Sensor Constraints
May 08, 2024We present a multi-agent reinforcement learning approach to solve a pursuit-evasion game between two players with car-like dynamics and sensing limitations. We develop a curriculum for an existing multi-agent deterministic policy gradient algorithm to simultaneously obtain strategies for both players, and deploy the learned strategies on real robots moving as fast as 2 m/s in indoor environments. Through experiments we show that the learned strategies improve over existing baselines by up to 30% in terms of capture rate for the pursuer. The learned evader model has up to 5% better escape rate over the baselines even against our competitive pursuer model. We also present experiment results which show how the pursuit-evasion game and its results evolve as the player dynamics and sensor constraints are varied. Finally, we deploy learned policies on physical robots for a game between the F1TENTH and JetRacer platforms and show that the learned strategies can be executed on real-robots. Our code and supplementary material including videos from experiments are available at https: //gonultasbu.github.io/pursuit-evasion/.
System Identification and Control of Front-Steered Ackermann Vehicles through Differentiable Physics
Aug 07, 2023



In this paper, we address the problem of system identification and control of a front-steered vehicle which abides by the Ackermann geometry constraints. This problem arises naturally for on-road and off-road vehicles that require reliable system identification and basic feedback controllers for various applications such as lane keeping and way-point navigation. Traditional system identification requires expensive equipment and is time consuming. In this work we explore the use of differentiable physics for system identification and controller design and make the following contributions: i)We develop a differentiable physics simulator (DPS) to provide a method for the system identification of front-steered class of vehicles whose system parameters are learned using a gradient-based method; ii) We provide results for our gradient-based method that exhibit better sample efficiency in comparison to other gradient-free methods; iii) We validate the learned system parameters by implementing a feedback controller to demonstrate stable lane keeping performance on a real front-steered vehicle, the F1TENTH; iv) Further, we provide results exhibiting comparable lane keeping behavior for system parameters learned using our gradient-based method with lane keeping behavior of the actual system parameters of the F1TENTH.
Online Coverage Planning for an Autonomous Weed Mowing Robot with Curvature Constraints
Nov 19, 2021
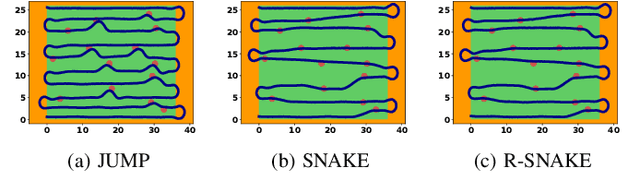
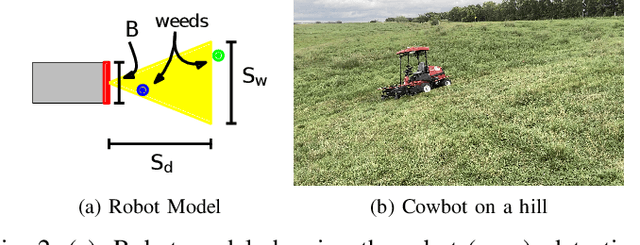
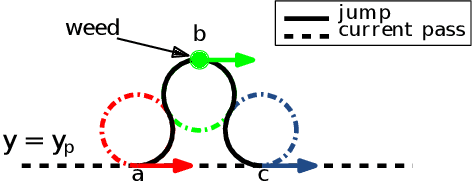
The land used for grazing cattle takes up about one-third of the land in the United States. These areas can be highly rugged. Yet, they need to be maintained to prevent weeds from taking over the nutritious grassland. This can be a daunting task especially in the case of organic farming since herbicides cannot be used. In this paper, we present the design of Cowbot, an autonomous weed mowing robot for pastures. Cowbot is an electric mower designed to operate in the rugged environments on cow pastures and provide a cost-effective method for weed control in organic farms. Path planning for the Cowbot is challenging since weed distribution on pastures is unknown. Given a limited field of view, online path planning is necessary to detect weeds and plan paths to mow them. We study the general online path planning problem for an autonomous mower with curvature and field of view constraints. We develop two online path planning algorithms that are able to utilize new information about weeds to optimize path length and ensure coverage. We deploy our algorithms on the Cowbot and perform field experiments to validate the suitability of our methods for real-time path planning. We also perform extensive simulation experiments which show that our algorithms result in up to 60 % reduction in path length as compared to baseline boustrophedon and random-search based coverage paths.