 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTool Macgyvering: A Novel Framework for Combining Tool Substitution and Construction
Aug 24, 2020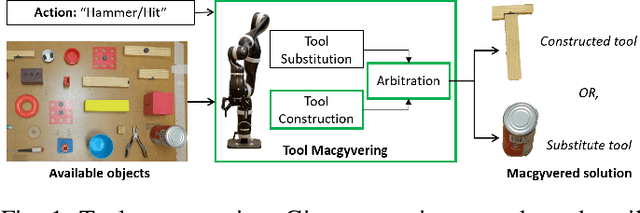
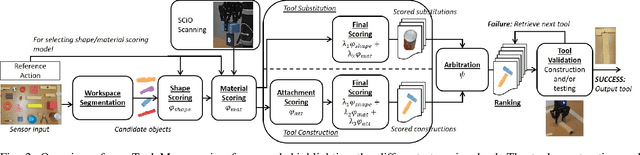
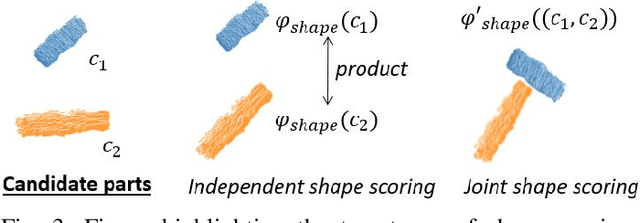
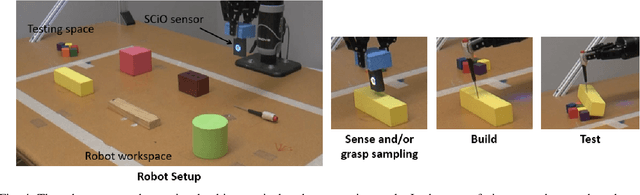
Macgyvering refers to solving problems inventively by using whatever objects are available at hand. Tool Macgyvering is a subset of macgyvering tasks involving a missing tool that is either substituted (tool substitution) or constructed (tool construction), from available objects. In this paper, we introduce a novel Tool Macgyvering framework that combines tool substitution and construction using arbitration that decides between the two options to output a final macgyvering solution. Our tool construction approach reasons about the shape, material, and different ways of attaching objects to construct a desired tool. We further develop value functions that enable the robot to effectively arbitrate between substitution and construction. Our results show that our tool construction approach is able to successfully construct working tools with an accuracy of 96.67%, and our arbitration strategy successfully chooses between substitution and construction with an accuracy of 83.33%.
Taking Recoveries to Task: Recovery-Driven Development for Recipe-based Robot Tasks
Jan 28, 2020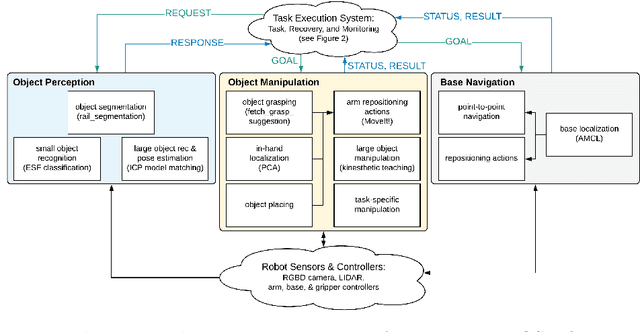
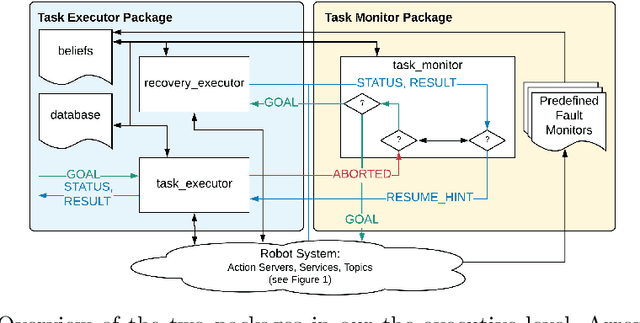

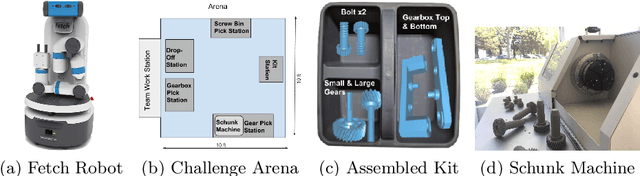
Robot task execution when situated in real-world environments is fragile. As such, robot architectures must rely on robust error recovery, adding non-trivial complexity to highly-complex robot systems. To handle this complexity in development, we introduce Recovery-Driven Development (RDD), an iterative task scripting process that facilitates rapid task and recovery development by leveraging hierarchical specification, separation of nominal task and recovery development, and situated testing. We validate our approach with our challenge-winning mobile manipulator software architecture developed using RDD for the FetchIt! Challenge at the IEEE 2019 International Conference on Robotics and Automation. We attribute the success of our system to the level of robustness achieved using RDD, and conclude with lessons learned for developing such systems.
Tool Substitution with Shape and Material Reasoning Using Dual Neural Networks
Nov 11, 2019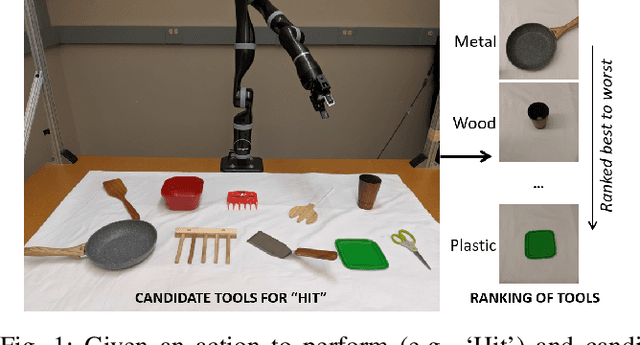
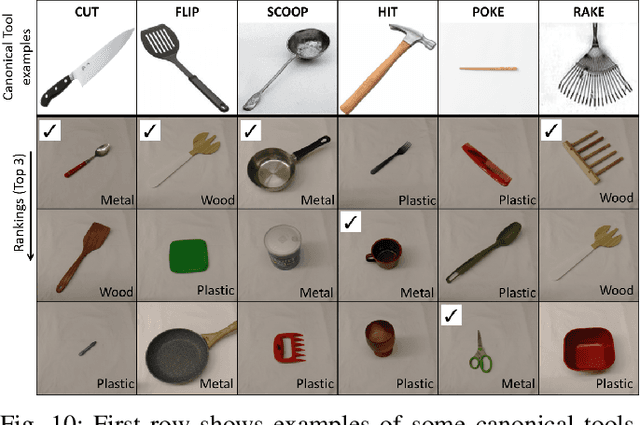
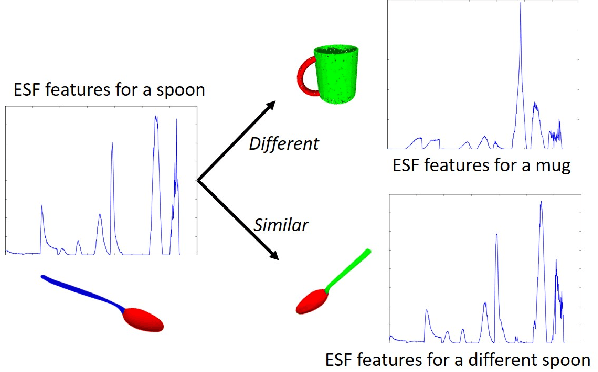
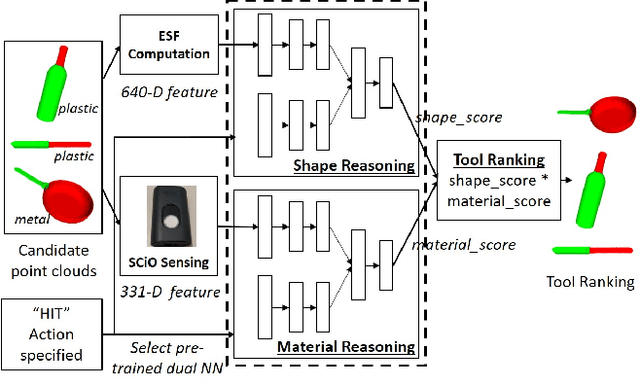
This paper explores the problem of tool substitution, namely, identifying substitute tools for performing a task from a given set of candidate tools. We introduce a novel approach to tool substitution, that unlike prior work in the area, combines both shape and material reasoning to effectively identify substitute tools. Our approach combines the use of visual and spectral reasoning using dual neural networks. It takes as input, the desired action to be performed, and outputs a ranking of the available candidate tools based on their suitability for performing the action. Our results on a test set of 30 real-world objects show that our approach is able to effectively match shape and material similarities, with improved tool substitution performance when combining both.