 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReflectDrive-2: Reinforcement-Learning-Aligned Self-Editing for Discrete Diffusion Driving
May 06, 2026We introduce ReflectDrive-2, a masked discrete diffusion planner with separate action expert for autonomous driving that represents plans as discrete trajectory tokens and generates them through parallel masked decoding. This discrete token space enables in-place trajectory revision: AutoEdit rewrites selected tokens using the same model, without requiring an auxiliary refinement network. To train this capability, we use a two-stage procedure. First, we construct structure-aware perturbations of expert trajectories along longitudinal progress and lateral heading directions and supervise the model to recover the original expert trajectory. We then fine-tune the full decision--draft--reflect rollout with reinforcement learning (RL), assigning terminal driving reward to the final post-edit trajectory and propagating policy-gradient credit through full-rollout transitions. Full-rollout RL proves crucial for coupling drafting and editing: under supervised training alone, inference-time AutoEdit improves PDMS by at most $0.3$, whereas RL increases its gain to $1.9$. We also co-design an efficient reflective decoding stack for the decision--draft--reflect pipeline, combining shared-prefix KV reuse, Alternating Step Decode, and fused on-device unmasking. On NAVSIM, ReflectDrive-2 achieves $91.0$ PDMS with camera-only input and $94.8$ PDMS in a best-of-6 oracle setting, while running at $31.8$ ms average latency on NVIDIA Thor.
VIL-100: A New Dataset and A Baseline Model for Video Instance Lane Detection
Aug 19, 2021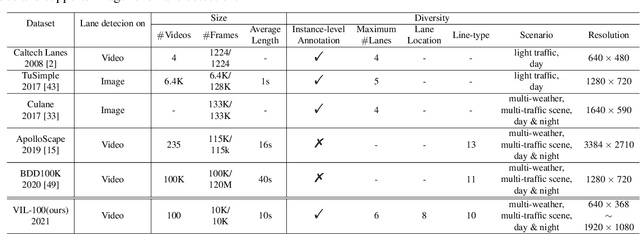
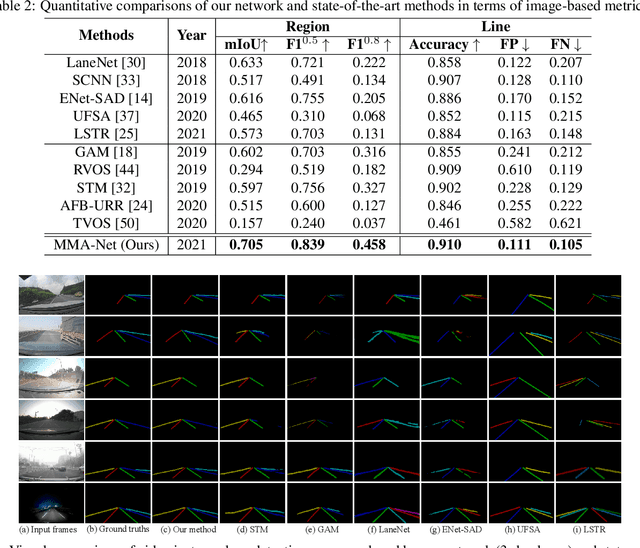
Lane detection plays a key role in autonomous driving. While car cameras always take streaming videos on the way, current lane detection works mainly focus on individual images (frames) by ignoring dynamics along the video. In this work, we collect a new video instance lane detection (VIL-100) dataset, which contains 100 videos with in total 10,000 frames, acquired from different real traffic scenarios. All the frames in each video are manually annotated to a high-quality instance-level lane annotation, and a set of frame-level and video-level metrics are included for quantitative performance evaluation. Moreover, we propose a new baseline model, named multi-level memory aggregation network (MMA-Net), for video instance lane detection. In our approach, the representation of current frame is enhanced by attentively aggregating both local and global memory features from other frames. Experiments on the new collected dataset show that the proposed MMA-Net outperforms state-of-the-art lane detection methods and video object segmentation methods. We release our dataset and code at https://github.com/yujun0-0/MMA-Net.