 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFeasible Region: an Actuation-Aware Extension of the Support Region
Mar 19, 2019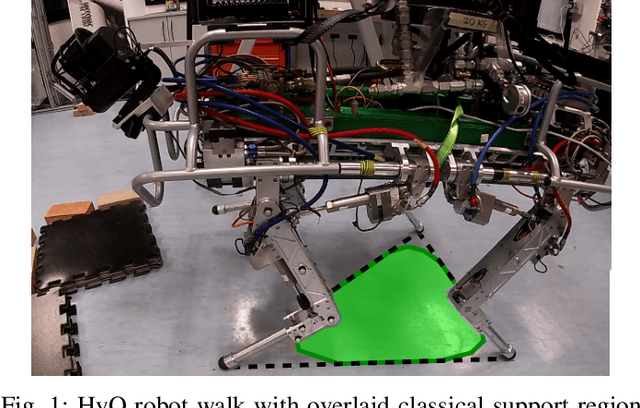
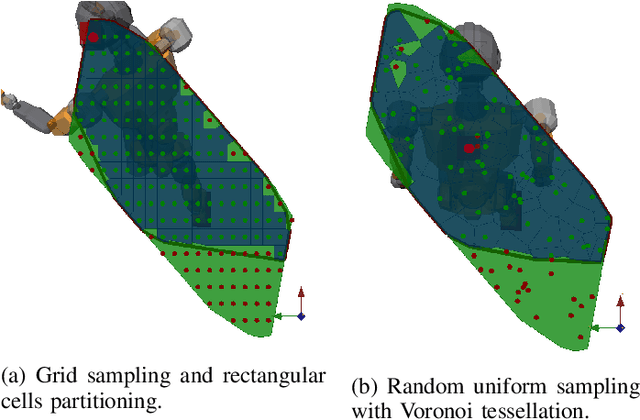
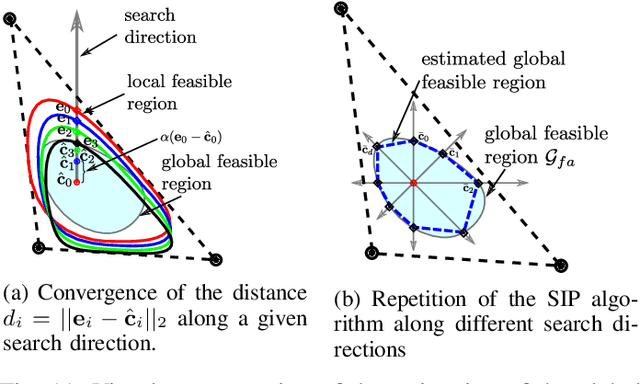
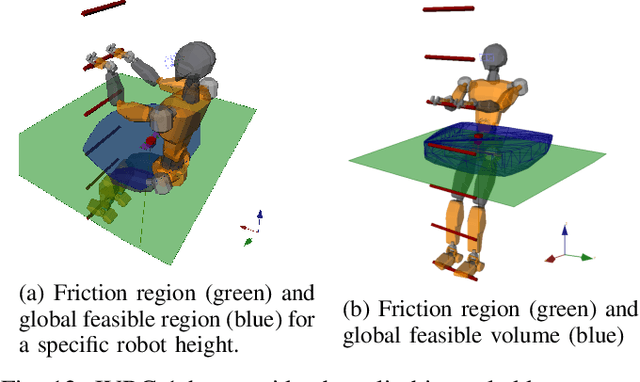
In legged locomotion the support region is defined as the 2D horizontal convex area where the robot is able to support its own body weight in static conditions. Despite this definition, when the joint-torque limits (actuation limits) are hit, the robot can be unable to carry its own body weight, even when the projection of its Center of Mass (CoM) lies inside the support region. In this manuscript we overcome this inconsistency by defining the Feasible Region, a revisited support region that guarantees both global static stability of the robot and the existence of a set of joint torques that are able to sustain the body weight. Thanks to the usage of an Iterative Projection (IP) algorithm, we show that the Feasible Region can be efficiently employed for online motion planning of loco-manipulation tasks for both humanoids and quadrupeds. Unlike the classical support region, the Feasible Region represents a local measure of the robots robustness to external disturbances and it must be recomputed at every configuration change. For this, we also propose a global extension of the Feasible Region that is configuration independent and only needs to be recomputed at every stance change.
Passive Whole-body Control for Quadruped Robots: Experimental Validation over Challenging Terrain
Mar 13, 2019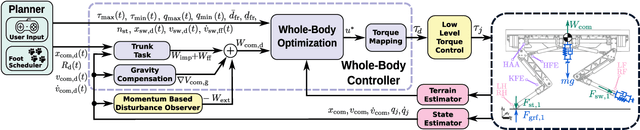
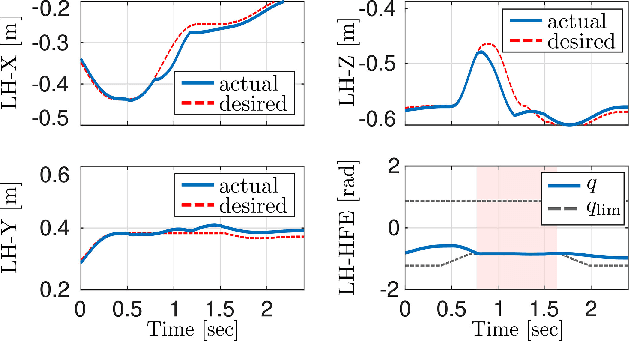
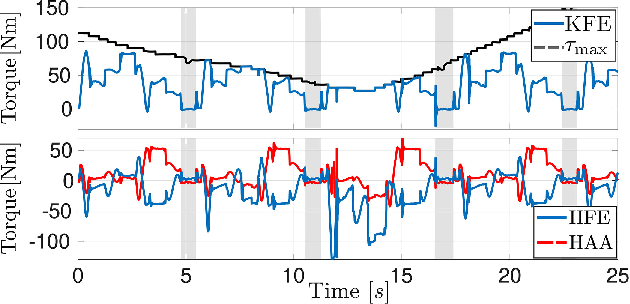
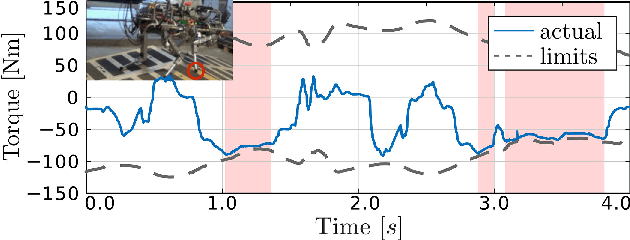
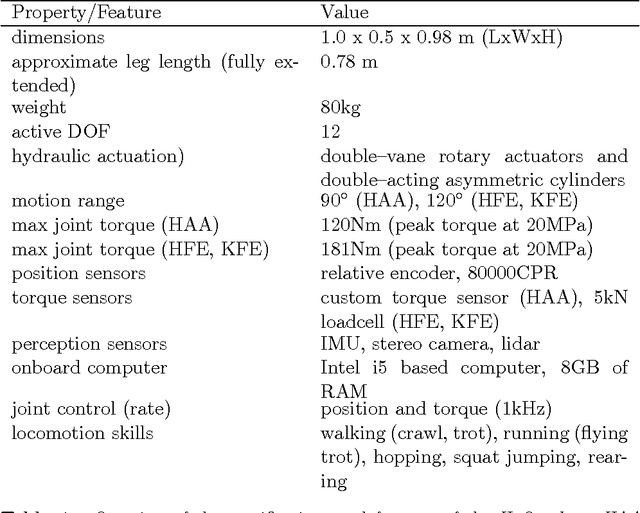
We present experimental results using a passive whole-body control approach for quadruped robots that achieves dynamic locomotion while compliantly balancing the robot's trunk. We formulate the motion tracking as a Quadratic Program (QP) that takes into account the full robot rigid body dynamics, the actuation limits, the joint limits and the contact interaction. We analyze the controller's robustness against inaccurate friction coefficient estimates and unstable footholds, as well as its capability to redistribute the load as a consequence of enforcing actuation limits. Additionally, we present practical implementation details gained from the experience with the real platform. Extensive experimental trials on the 90 kg Hydraulically actuated Quadruped (HyQ) robot validate the capabilities of this controller under various terrain conditions and gaits. The proposed approach is superior for accurate execution of highly dynamic motions with respect to the current state of the art.
Fast and Continuous Foothold Adaptation for Dynamic Locomotion through CNNs
Feb 15, 2019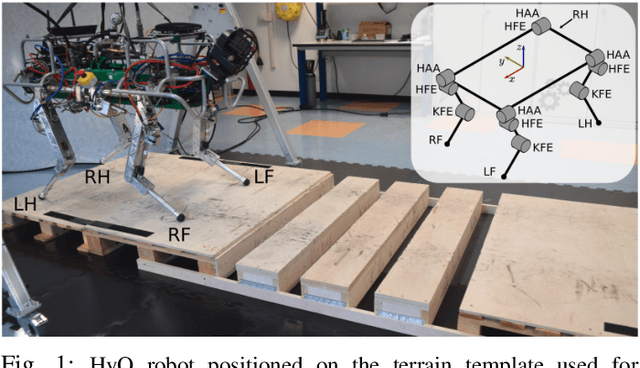
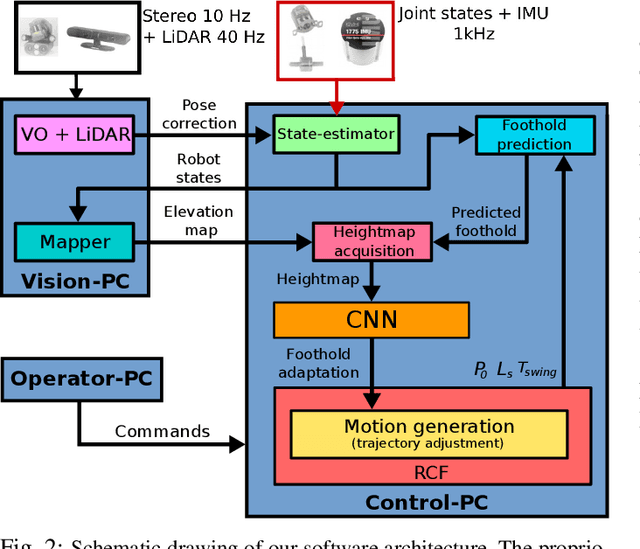
Legged robots can outperform wheeled machines for most navigation tasks across unknown and rough terrains. For such tasks, visual feedback is a fundamental asset to provide robots with terrain-awareness. However, robust dynamic locomotion on difficult terrains with real-time performance guarantees remains a challenge. We present here a real-time, dynamic foothold adaptation strategy based on visual feedback. Our method adjusts the landing position of the feet in a fully reactive manner, using only on-board computers and sensors. The correction is computed and executed continuously along the swing phase trajectory of each leg. To efficiently adapt the landing position, we implement a self-supervised foothold classifier based on a Convolutional Neural Network (CNN). Our method results in an up to 200 times faster computation with respect to the full-blown heuristics. Our goal is to react to visual stimuli from the environment, bridging the gap between blind reactive locomotion and purely vision-based planning strategies. We assess the performance of our method on the dynamic quadruped robot HyQ, executing static and dynamic gaits (at speeds up to 0.5 m/s) in both simulated and real scenarios; the benefit of safe foothold adaptation is clearly demonstrated by the overall robot behavior.
Heuristic Planning for Rough Terrain Locomotion in Presence of External Disturbances and Variable Perception Quality
Nov 07, 2018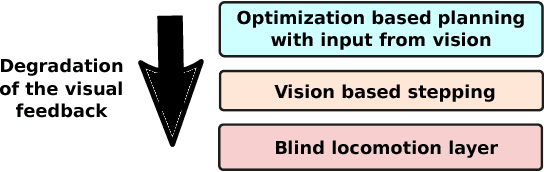
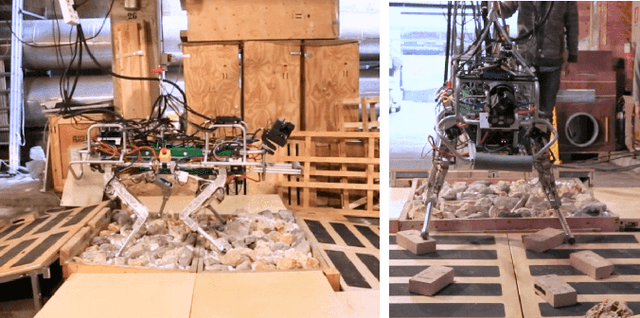
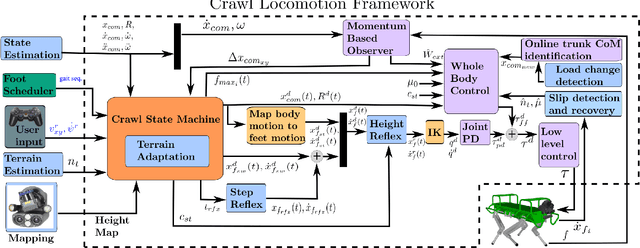
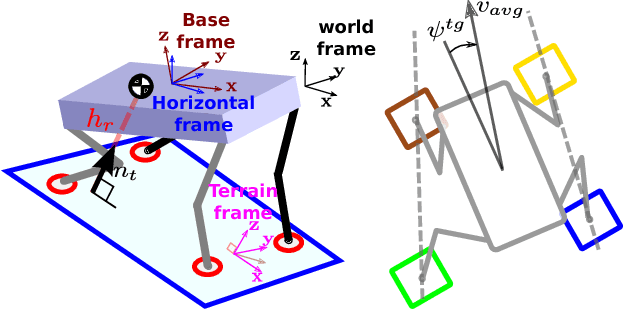
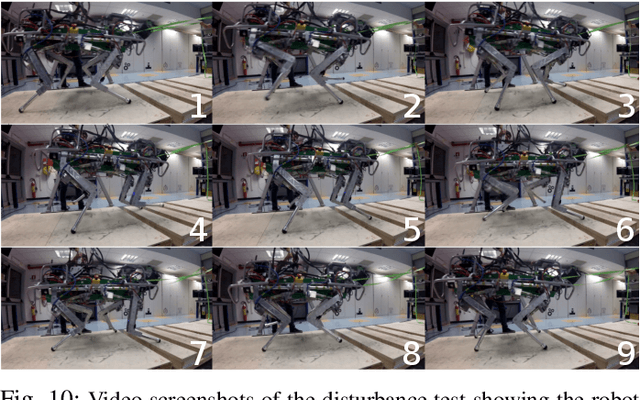
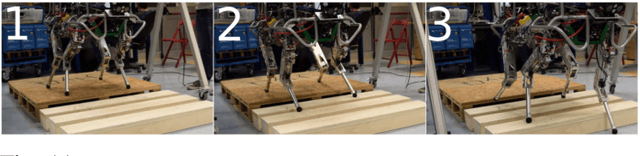
The quality of the visual feedback can vary significantly on a legged robot that is meant to traverse unknown and unstructured terrains. The map of the environment, acquired with online state-of-the-art algorithms, often degrades after a few steps, due to sensing inaccuracies, slippage and unexpected disturbances. When designing locomotion algorithms, this degradation can result in planned trajectories that are not consistent with the reality, if not dealt properly. In this work, we propose a heuristic-based planning approach that enables a quadruped robot to successfully traverse a significantly rough terrain (e.g., stones up to 10 cm of diameter), in absence of visual feedback. When available, the approach allows also to exploit the visual feedback (e.g., to enhance the stepping strategy) in multiple ways, according to the quality of the 3D map. The proposed framework also includes reflexes, triggered in specific situations, and the possibility to estimate online an unknown time-varying disturbance and compensate for it. We demonstrate the effectiveness of the approach with experiments performed on our quadruped robot HyQ (85 kg), traversing different terrains, such as: ramps, rocks, bricks, pallets and stairs. We also demonstrate the capability to estimate and compensate for disturbances, showing the robot walking up a ramp while pulling a cart attached to its back.
Application of Wrench based Feasibility Analysis to the Online Trajectory Optimization of Legged Robots
Jun 18, 2018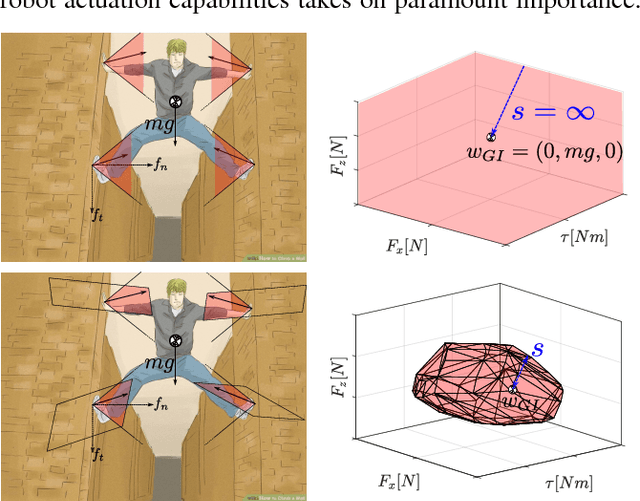
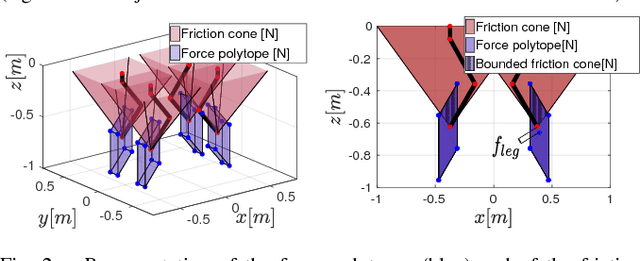
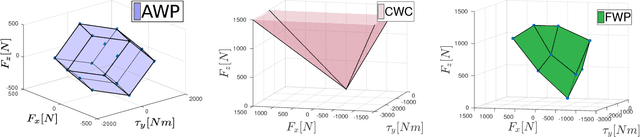
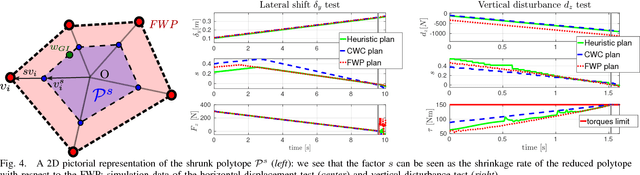
Motion planning in multi-contact scenarios has recently gathered interest within the legged robotics community, however actuator force/torque limits are rarely considered. We believe that these limits gain paramount importance when the complexity of the terrains to be traversed increases. We build on previous research from the field of robotic grasping to propose two new six-dimensional bounded polytopes named the Actuation Wrench Polytope (AWP) and the Feasible Wrench Polytope (FWP). We define the AWP as the set of all the wrenches that a robot can generate while considering its actuation limits. This considers the admissible contact forces that the robot can generate given its current configuration and actuation capabilities. The Contact Wrench Cone (CWC), instead, includes features of the environment such as the contact normal or the friction coefficient. The intersection of the AWP and of the CWC results in a convex polytope, the FWP, which turns out to be more descriptive of the real robot capabilities than existing simplified models, while maintaining the same compact representation. We explain how to efficiently compute the vertex-description of the FWP that is then used to evaluate a feasibility factor that we adapted from the field of robotic grasping. This allows us to optimize for robustness to external disturbance wrenches. Based on this, we present an implementation of a motion planner for our quadruped robot HyQ that provides online Center of Mass (CoM) trajectories that are guaranteed to be statically stable and actuation consistent.
The Actuation-consistent Wrench Polytope (AWP) and the Feasible Wrench Polytope (FWP)
Dec 07, 2017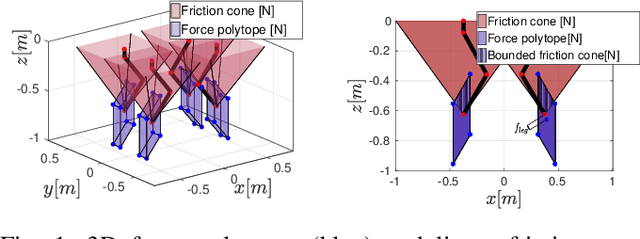
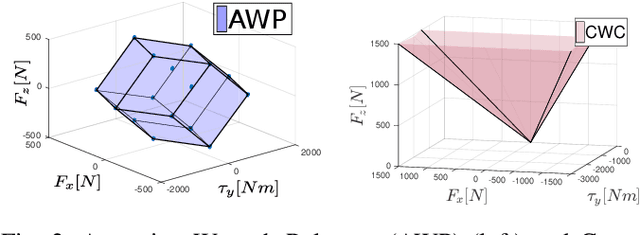
The motivation of our current research is to devise motion planners for legged locomotion that are able to exploit the robot's actuation capabilities. This means, when possible, to minimize joint torques or to propel as much as admissible when required. For this reason we define two new 6 dimensional bounded polytopes that we name Actuation-consistent Wrench Polytope (AWP) and Feasible Wrench Polytope (FWP). These objects turn out to be very useful in motion planning for the definition of constraints on the accelerations of the Center of Mass of the robot that respect the friction cones and the actuation limits. The AWP and the FWP could be used also in the robot design phase to size the actuators of the system based on some predefined reference motion.
Robot Impedance Control and Passivity Analysis with Inner Torque and Velocity Feedback Loops
May 23, 2016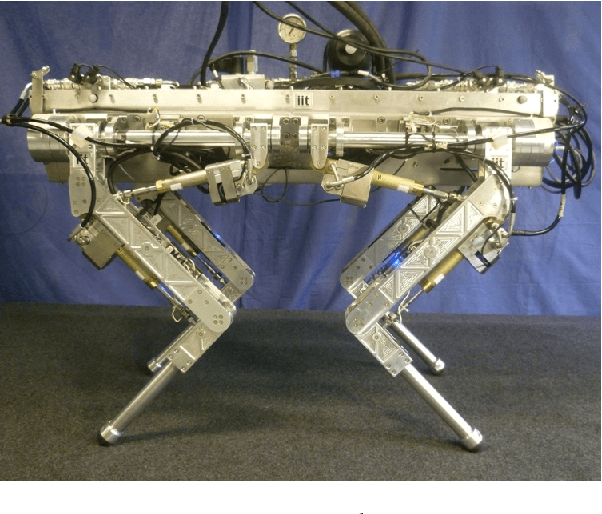
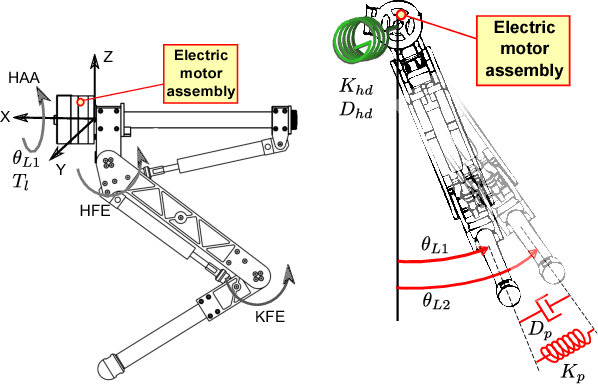
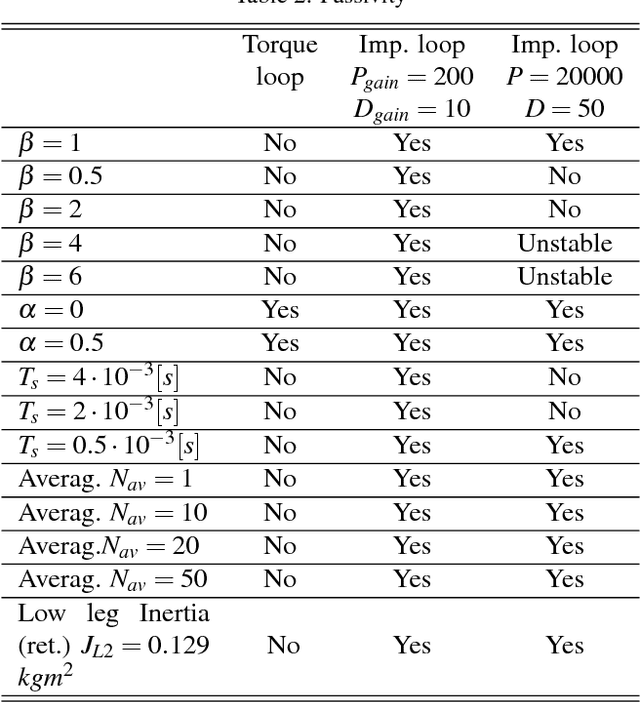
Impedance control is a well-established technique to control interaction forces in robotics. However, real implementations of impedance control with an inner loop may suffer from several limitations. Although common practice in designing nested control systems is to maximize the bandwidth of the inner loop to improve tracking performance, it may not be the most suitable approach when a certain range of impedance parameters has to be rendered. In particular, it turns out that the viable range of stable stiffness and damping values can be strongly affected by the bandwidth of the inner control loops (e.g. a torque loop) as well as by the filtering and sampling frequency. This paper provides an extensive analysis on how these aspects influence the stability region of impedance parameters as well as the passivity of the system. This will be supported by both simulations and experimental data. Moreover, a methodology for designing joint impedance controllers based on an inner torque loop and a positive velocity feedback loop will be presented. The goal of the velocity feedback is to increase (given the constraints to preserve stability) the bandwidth of the torque loop without the need of a complex controller.
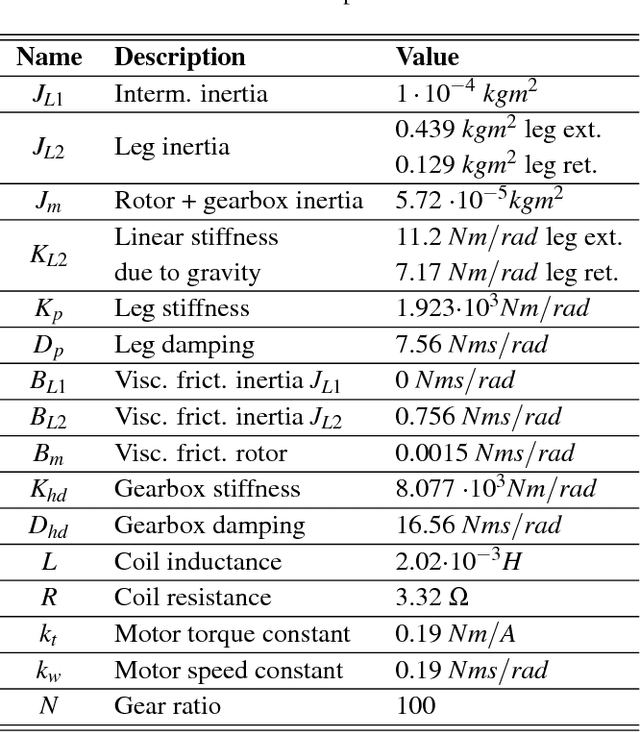
Validation of computer simulations of the HyQ robot
Apr 22, 2016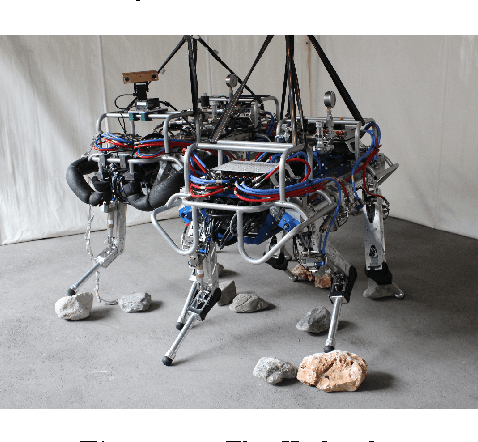
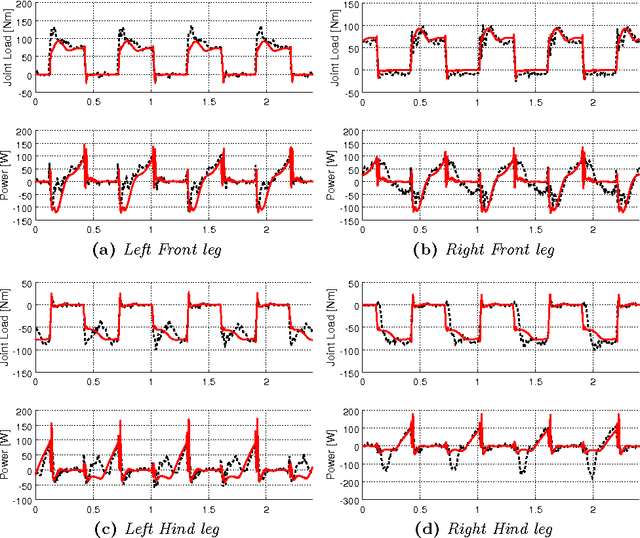
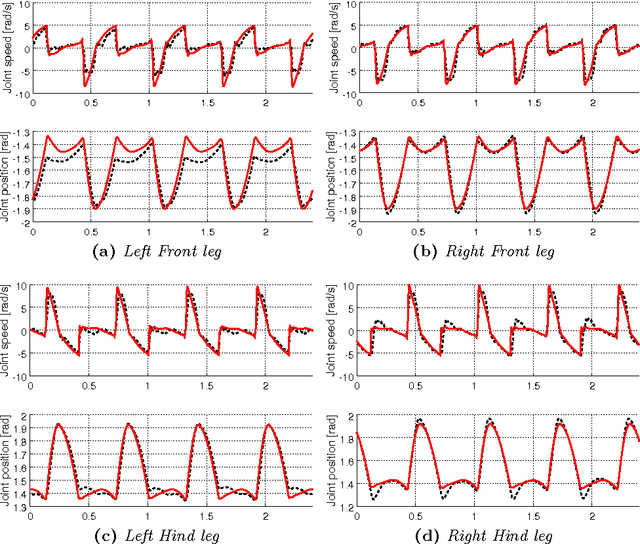
This short technical report illustrates the results of a test procedure we performed to validate the computer simulation of the HyQ robot.