 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLine Walking and Balancing for Legged Robots with Point Feet
Jul 02, 2020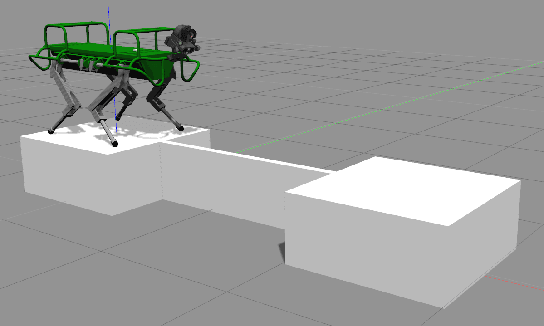
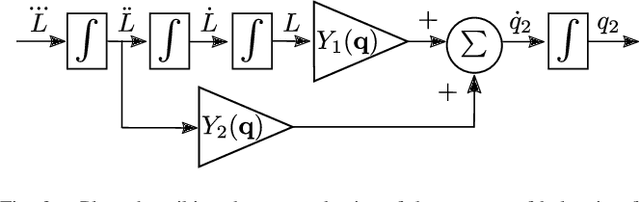
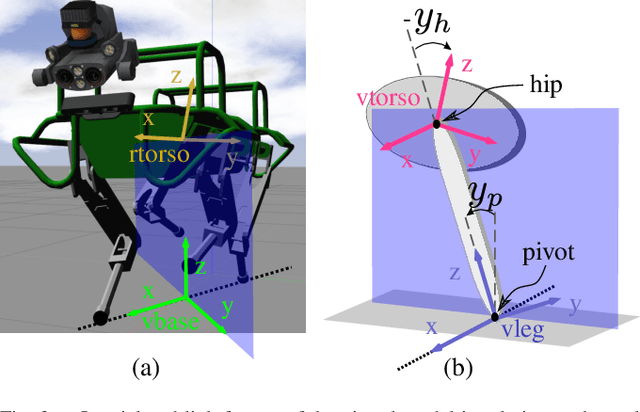
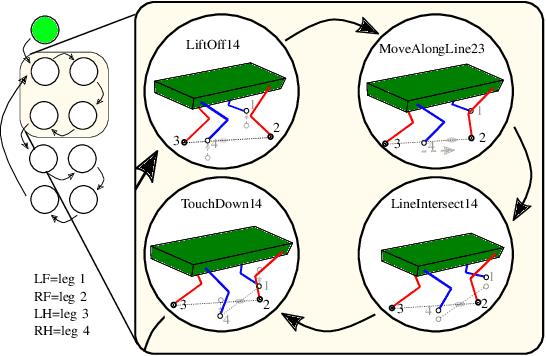
The ability of legged systems to traverse highly-constrained environments depends by and large on the performance of their motion and balance controllers. This paper presents a controller that excels in a scenario that most state-of-the-art balance controllers have not yet addressed: line walking, or walking on nearly null support regions. Our approach uses a low-dimensional virtual model (2-DoF) to generate balancing actions through a previously derived four-term balance controller and transforms them to the robot through a derived kinematic mapping. The capabilities of this controller are tested in simulation, where we show the 90kg quadruped robot HyQ crossing a bridge of only 6 cm width (compared to its 4 cm diameter foot sphere), by balancing on two feet at any time while moving along a line. Additional simulations are carried to test the performance of the controller and the effect of external disturbances. The same controller is then used on the real robot to present for the first time a legged robot balancing on a contact line of nearly null support area.
Automatic Differentiation of Rigid Body Dynamics for Optimal Control and Estimation
Jan 16, 2018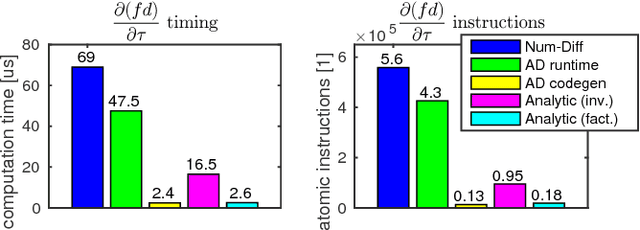
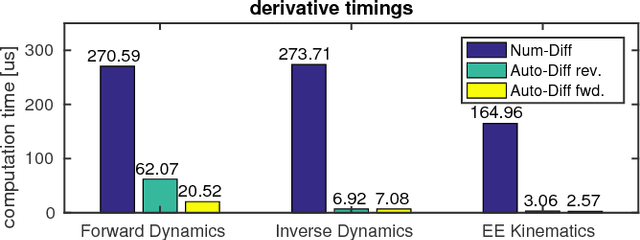
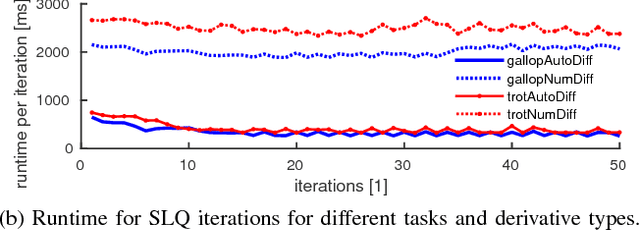
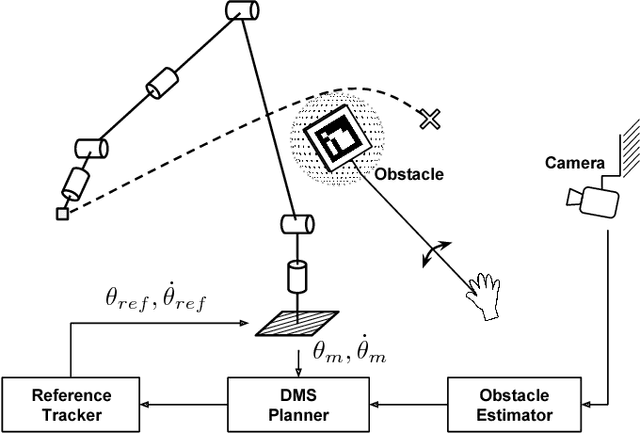
Many algorithms for control, optimization and estimation in robotics depend on derivatives of the underlying system dynamics, e.g. to compute linearizations, sensitivities or gradient directions. However, we show that when dealing with Rigid Body Dynamics, these derivatives are difficult to derive analytically and to implement efficiently. To overcome this issue, we extend the modelling tool `RobCoGen' to be compatible with Automatic Differentiation. Additionally, we propose how to automatically obtain the derivatives and generate highly efficient source code. We highlight the flexibility and performance of the approach in two application examples. First, we show a Trajectory Optimization example for the quadrupedal robot HyQ, which employs auto-differentiation on the dynamics including a contact model. Second, we present a hardware experiment in which a 6 DoF robotic arm avoids a randomly moving obstacle in a go-to task by fast, dynamic replanning.
Robot Impedance Control and Passivity Analysis with Inner Torque and Velocity Feedback Loops
May 23, 2016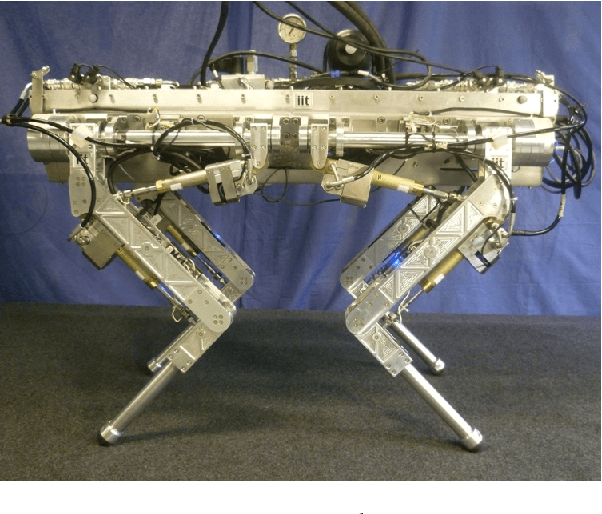
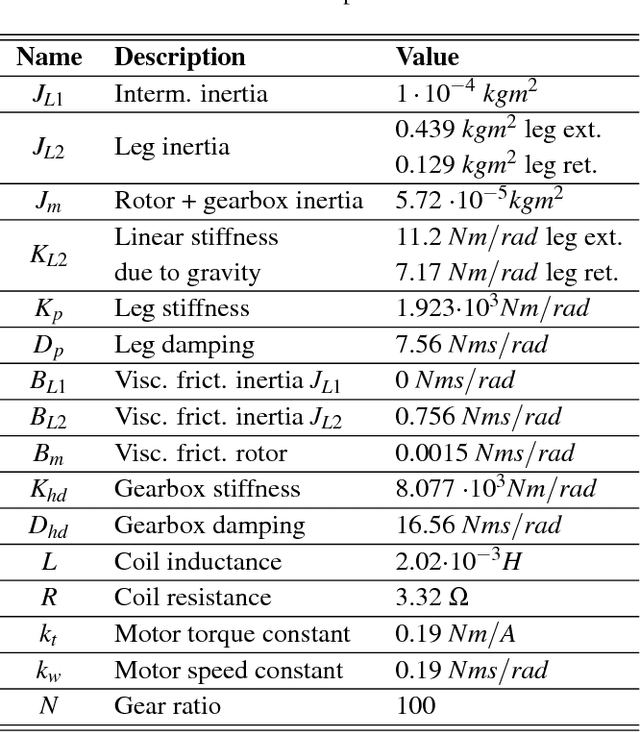
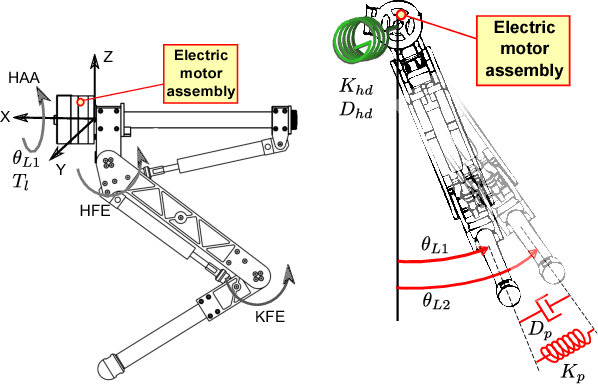
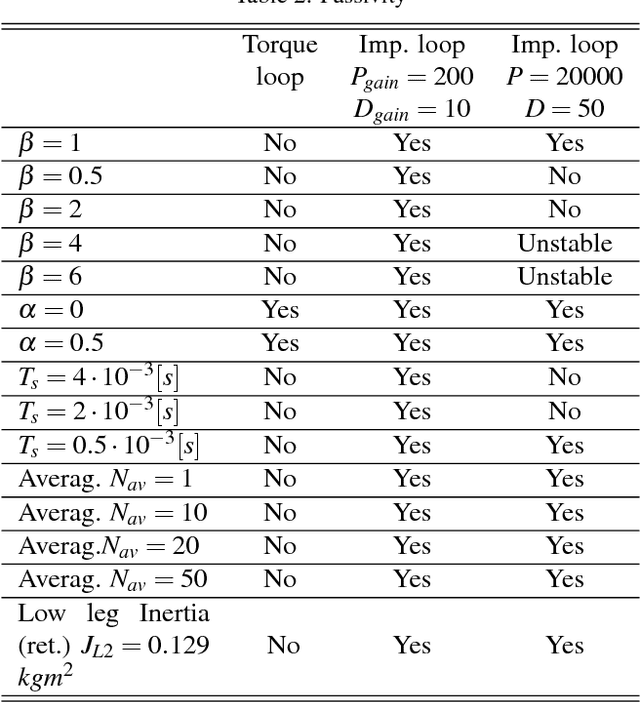
Impedance control is a well-established technique to control interaction forces in robotics. However, real implementations of impedance control with an inner loop may suffer from several limitations. Although common practice in designing nested control systems is to maximize the bandwidth of the inner loop to improve tracking performance, it may not be the most suitable approach when a certain range of impedance parameters has to be rendered. In particular, it turns out that the viable range of stable stiffness and damping values can be strongly affected by the bandwidth of the inner control loops (e.g. a torque loop) as well as by the filtering and sampling frequency. This paper provides an extensive analysis on how these aspects influence the stability region of impedance parameters as well as the passivity of the system. This will be supported by both simulations and experimental data. Moreover, a methodology for designing joint impedance controllers based on an inner torque loop and a positive velocity feedback loop will be presented. The goal of the velocity feedback is to increase (given the constraints to preserve stability) the bandwidth of the torque loop without the need of a complex controller.
Validation of computer simulations of the HyQ robot
Apr 22, 2016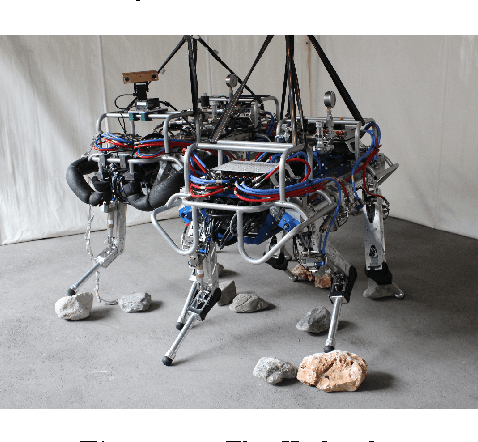
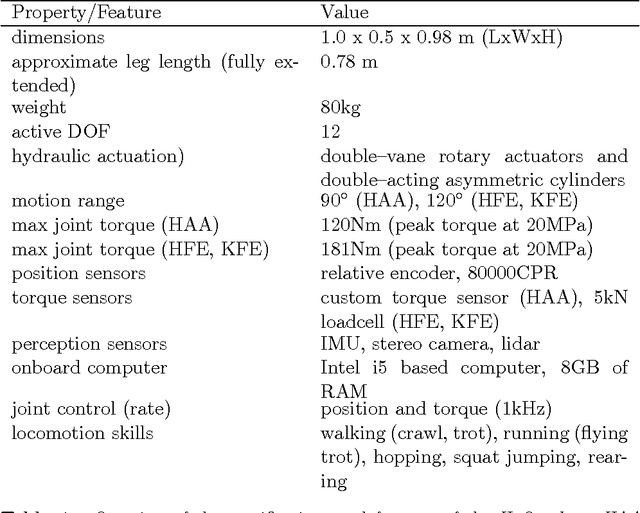
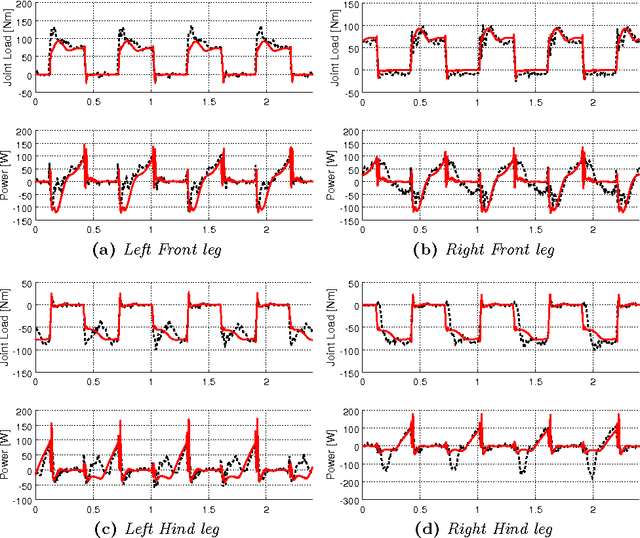
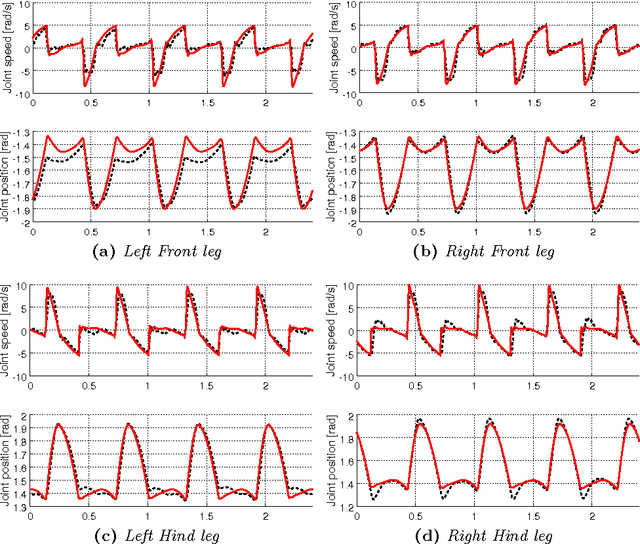
This short technical report illustrates the results of a test procedure we performed to validate the computer simulation of the HyQ robot.
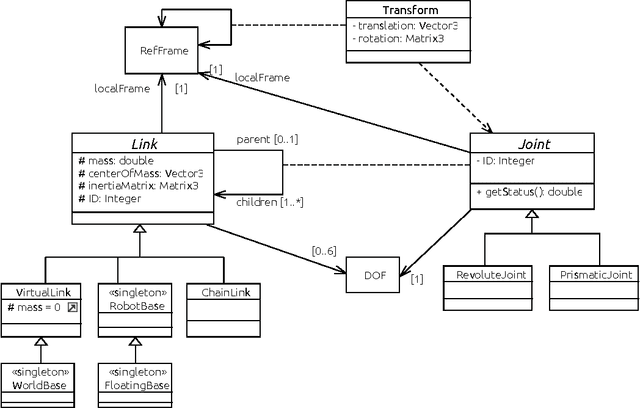
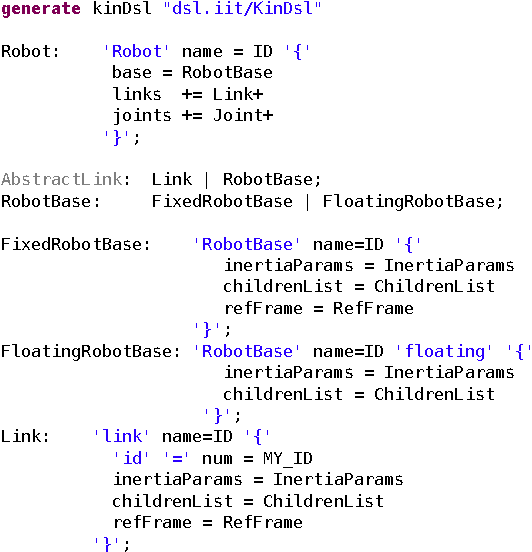
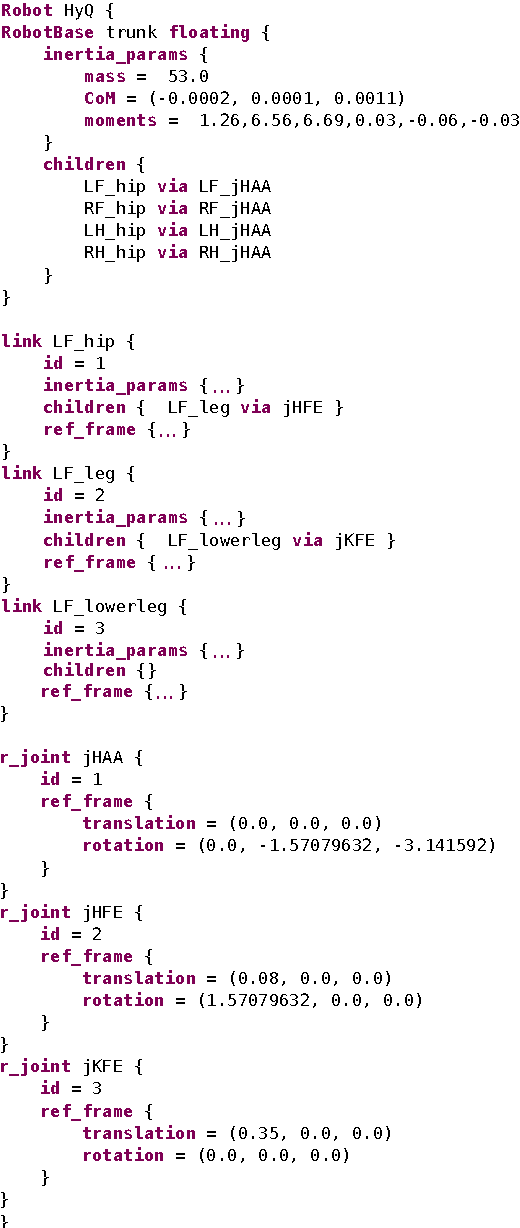
A Domain Specific Language for kinematic models and fast implementations of robot dynamics algorithms
Jan 30, 2013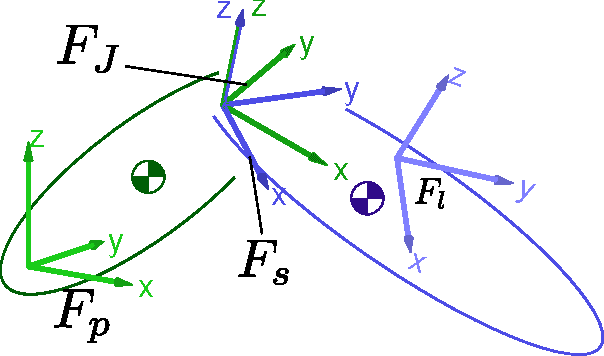
Rigid body dynamics algorithms play a crucial role in several components of a robot controller and simulations. Real time constraints in high frequency control loops and time requirements of specific applications demand these functions to be very efficient. Despite the availability of established algorithms, their efficient implementation for a specific robot still is a tedious and error-prone task. However, these components are simply necessary to get high performance controllers. To achieve efficient yet well maintainable implementations of dynamics algorithms we propose to use a domain specific language to describe the kinematics/dynamics model of a robot. Since the algorithms are parameterized on this model, executable code tailored for a specific robot can be generated, thanks to the facilities available for \dsls. This approach allows the users to deal only with the high level description of their robot and relieves them from problematic hand-crafted development; resources and efforts can then be focused on open research questions. Preliminary results about the generation of efficient code for inverse dynamics will be presented as a proof of concept of this approach.