 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKnowledge-Grounded Reinforcement Learning
Oct 07, 2022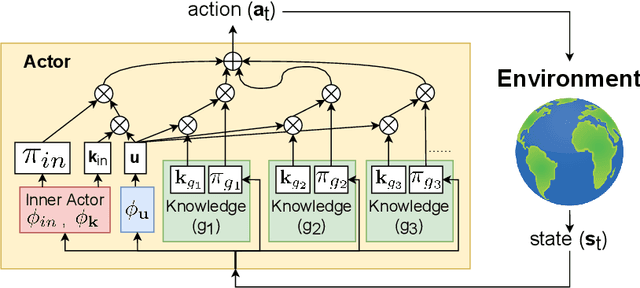
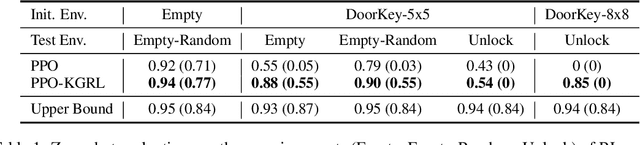
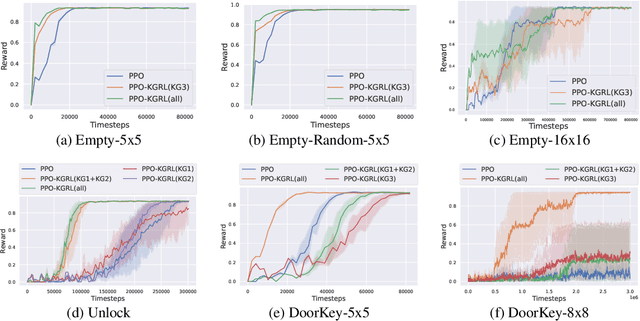

Receiving knowledge, abiding by laws, and being aware of regulations are common behaviors in human society. Bearing in mind that reinforcement learning (RL) algorithms benefit from mimicking humanity, in this work, we propose that an RL agent can act on external guidance in both its learning process and model deployment, making the agent more socially acceptable. We introduce the concept, Knowledge-Grounded RL (KGRL), with a formal definition that an agent learns to follow external guidelines and develop its own policy. Moving towards the goal of KGRL, we propose a novel actor model with an embedding-based attention mechanism that can attend to either a learnable internal policy or external knowledge. The proposed method is orthogonal to training algorithms, and the external knowledge can be flexibly recomposed, rearranged, and reused in both training and inference stages. Through experiments on tasks with discrete and continuous action space, our KGRL agent is shown to be more sample efficient and generalizable, and it has flexibly rearrangeable knowledge embeddings and interpretable behaviors.
Differentiable Robotic Manipulation of Deformable Rope-like Objects Using Compliant Position-based Dynamics
Feb 20, 2022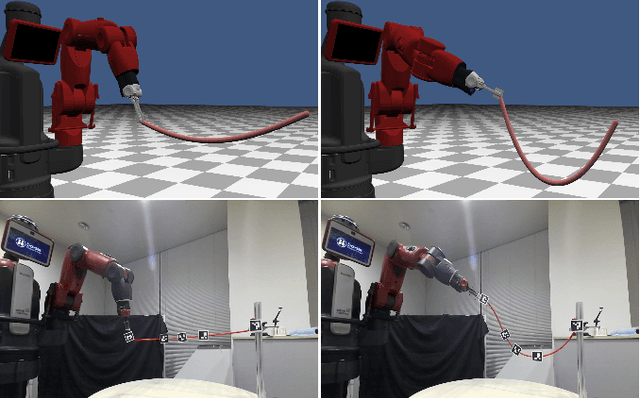

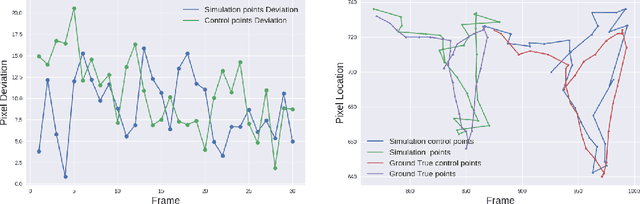
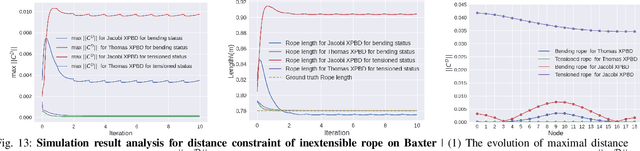
Robot manipulation of rope-like objects is an interesting problem that has some critical applications, such as autonomous robotic suturing. Solving for and controlling rope is difficult due to the complexity of rope physics and the challenge of building fast and accurate models of deformable materials. While more data-driven approaches have become more popular for finding controllers that learn to do a single task, there is still a strong motivation for a model-based method that could be used to solve a large variety of optimization problems. Towards this end, we introduced compliant, position-based dynamics (XPBD) to model rope-like objects. Using geometric constraints, the model can represent the coupling of shear/stretch and bend/twist effects. Of crucial importance is that our formulation is differentiable, which can solve parameter estimation problems and improve the matching of rope physics to real-life scenarios (i.e., the real-to-sim problem). For the generality of rope-like objects, two different solvers are proposed to handle the inextensible and extensible effects of varied material stiffness for the rope. We demonstrate our framework's robustness and accuracy on real-to-sim experimental setups using the Baxter robot and the da Vinci research kit (DVRK). Our work leads to a new path for robotic manipulation of the deformable rope-like object taking advantage of the ready-to-use gradients.
Parameter Identification and Motion Control for Articulated Rigid Body Robots Using Differentiable Position-based Dynamics
Jan 15, 2022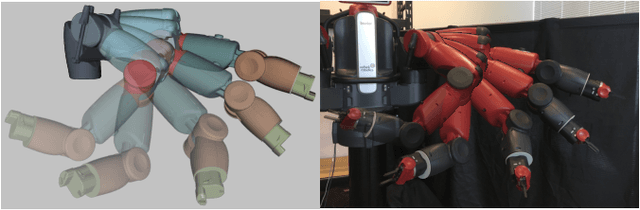
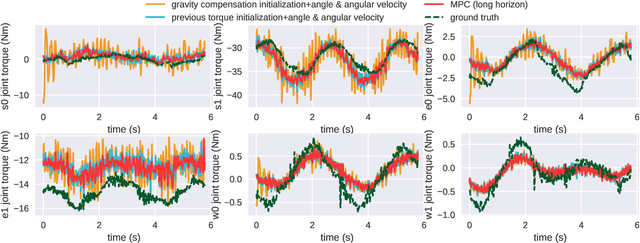
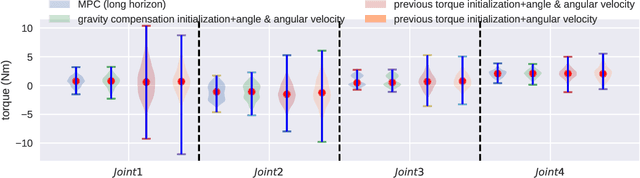
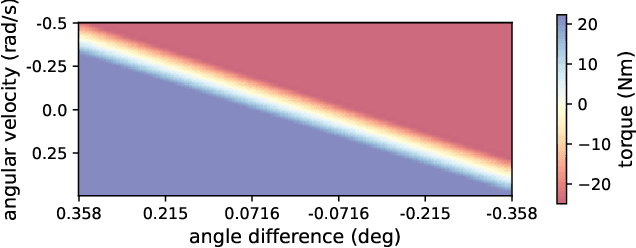
Simulation modeling of robots, objects, and environments is the backbone for all model-based control and learning. It is leveraged broadly across dynamic programming and model-predictive control, as well as data generation for imitation, transfer, and reinforcement learning. In addition to fidelity, key features of models in these control and learning contexts are speed, stability, and native differentiability. However, many popular simulation platforms for robotics today lack at least one of the features above. More recently, position-based dynamics (PBD) has become a very popular simulation tool for modeling complex scenes of rigid and non-rigid object interactions, due to its speed and stability, and is starting to gain significant interest in robotics for its potential use in model-based control and learning. Thus, in this paper, we present a mathematical formulation for coupling position-based dynamics (PBD) simulation and optimal robot design, model-based motion control and system identification. Our framework breaks down PBD definitions and derivations for various types of joint-based articulated rigid bodies. We present a back-propagation method with automatic differentiation, which can integrate both positional and angular geometric constraints. Our framework can critically provide the native gradient information and perform gradient-based optimization tasks. We also propose articulated joint model representations and simulation workflow for our differentiable framework. We demonstrate the capability of the framework in efficient optimal robot design, accurate trajectory torque estimation and supporting spring stiffness estimation, where we achieve minor errors. We also implement impedance control in real robots to demonstrate the potential of our differentiable framework in human-in-the-loop applications.
Image Based Reconstruction of Liquids from 2D Surface Detections
Nov 22, 2021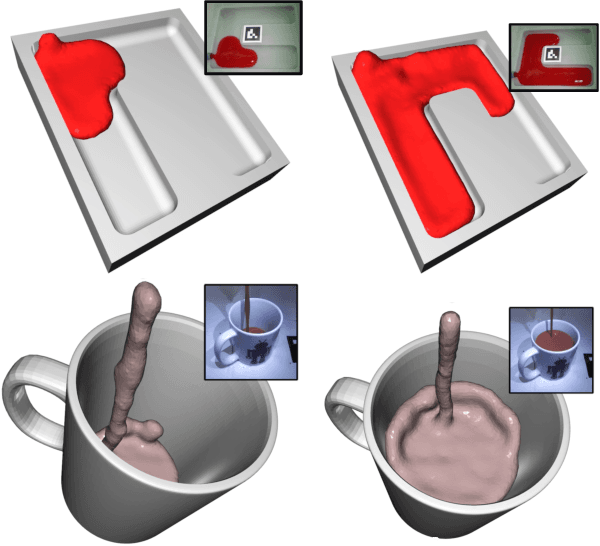
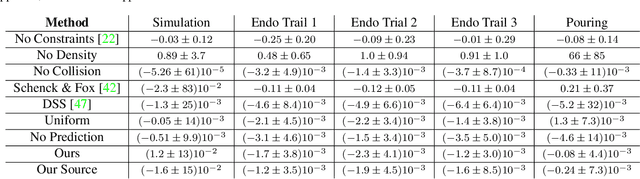
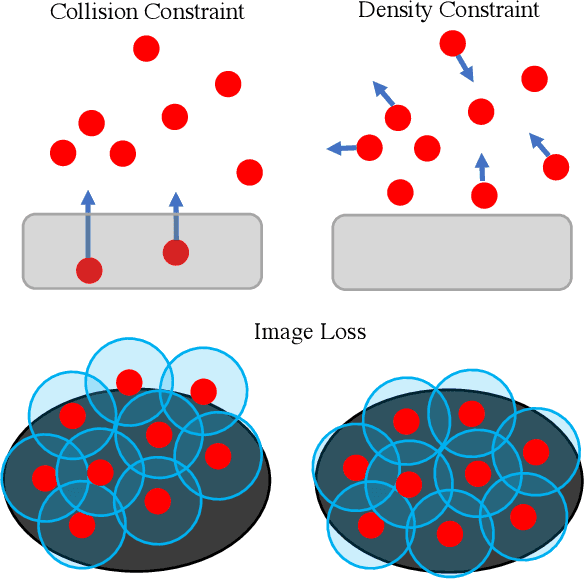
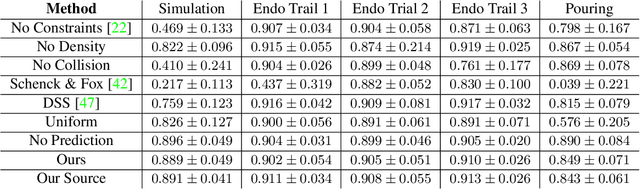
In this work, we present a solution to the challenging problem of reconstructing liquids from image data. The challenges in reconstructing liquids, which is not faced in previous reconstruction works on rigid and deforming surfaces, lies in the inability to use depth sensing and color features due the variable index of refraction, opacity, and environmental reflections. Therefore, we limit ourselves to only surface detections (i.e. binary mask) of liquids as observations and do not assume any prior knowledge on the liquids properties. A novel optimization problem is posed which reconstructs the liquid as particles by minimizing the error between a rendered surface from the particles and the surface detections while satisfying liquid constraints. Our solvers to this optimization problem are presented and no training data is required to apply them. We also propose a dynamic prediction to seed the reconstruction optimization from the previous time-step. We test our proposed methods in simulation and on two new liquid datasets which we open source so the broader research community can continue developing in this under explored area.
CRANE: a 10 Degree-of-Freedom, Tele-surgical System for Dexterous Manipulation within Imaging Bores
Sep 28, 2021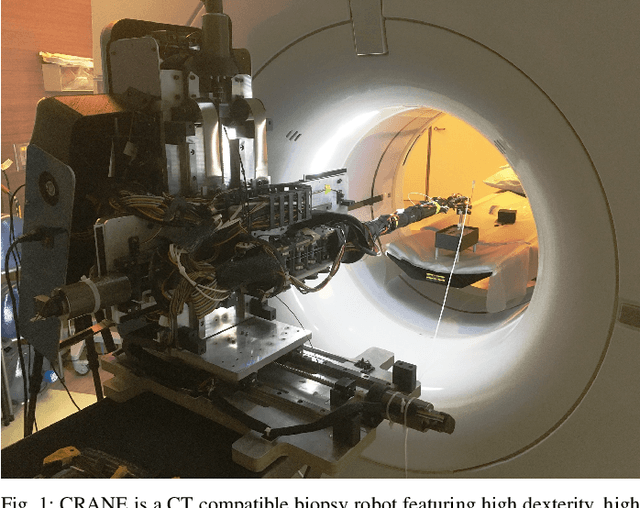
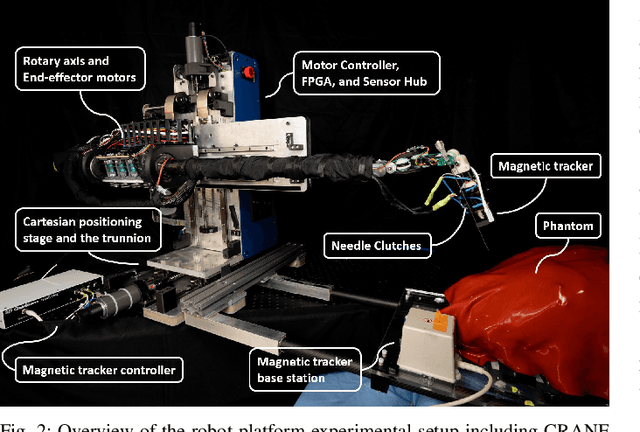
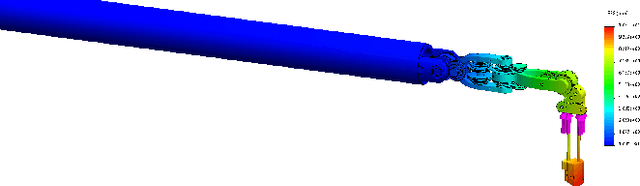
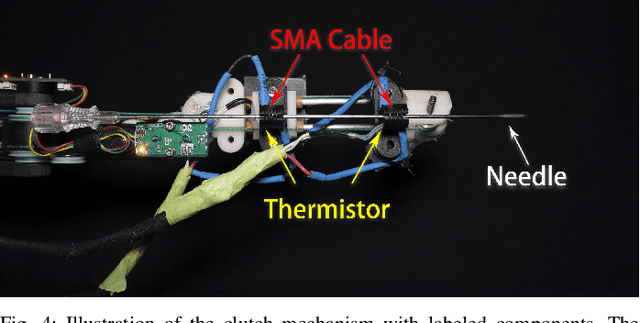
Physicians perform minimally invasive percutaneous procedures under Computed Tomography (CT) image guidance both for the diagnosis and treatment of numerous diseases. For these procedures performed within Computed Tomography Scanners, robots can enable physicians to more accurately target sub-dermal lesions while increasing safety. However, existing robots for this application have limited dexterity, workspace, or accuracy. This paper describes the design, manufacture, and performance of a highly dexterous, low-profile, 8+2 Degree-ofFreedom (DoF) robotic arm for CT guided percutaneous needle biopsy. In this article, we propose CRANE: CT Robot and Needle Emplacer. The design focuses on system dexterity with high accuracy: extending physicians' ability to manipulate and insert needles within the scanner bore while providing the high accuracy possible with a robot. We also propose and validate a system architecture and control scheme for low profile and highly accurate image-guided robotics, that meets the clinical requirements for target accuracy during an in-situ evaluation. The accuracy is additionally evaluated through a trajectory tracking evaluation resulting in <0.2mm and <0.71degree tracking error. Finally, we present a novel needle driving and grasping mechanism with controlling electronics that provides simple manufacturing, sterilization, and adaptability to accommodate different sizes and types of needles.
Markerless Suture Needle 6D Pose Tracking with Robust Uncertainty Estimation for Autonomous Minimally Invasive Robotic Surgery
Sep 26, 2021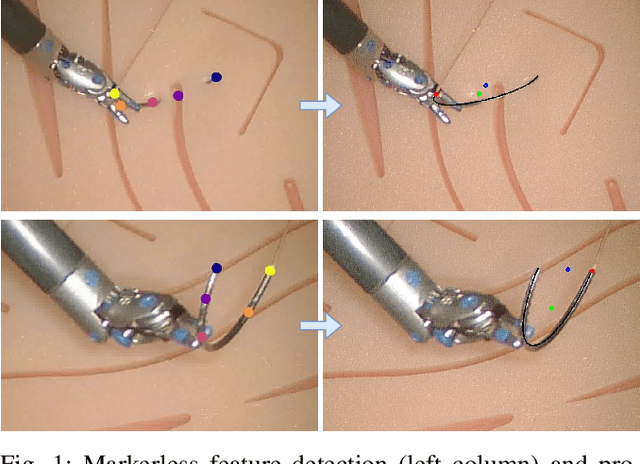
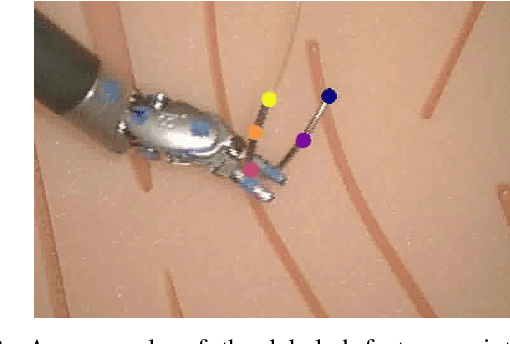
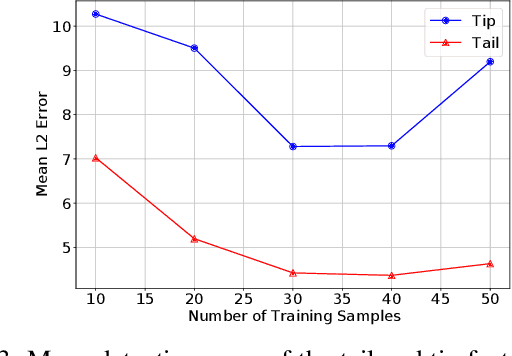
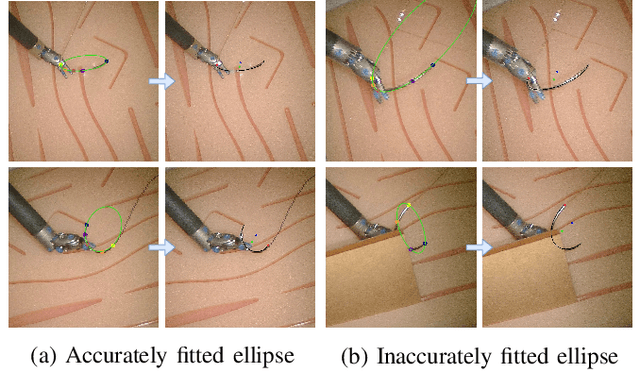
Suture needle localization plays a crucial role towards autonomous suturing. To track the 6D pose of a suture needle robustly, previous approaches usually add markers on the needle or perform complex operations for feature extraction, making these methods difficult to be applicable to real-world environments. Therefore in this work, we present a novel approach for markerless suture needle pose tracking using Bayesian filters. A data-efficient feature point detector is trained to extract the feature points on the needle. Then based on these detections, we propose a novel observation model that measures the overlap between the detections and the expected projection of the needle, which can be calculated efficiently. In addition, for the proposed method, we derive the approximation for the covariance of the observation noise, making this model more robust to the uncertainty in the detections. The experimental results in simulation show that the proposed observation model achieves low tracking errors of approximately 1.5mm in position in space and 1 degree in orientation. We also demonstrate the qualitative results of our trained markerless feature detector combined with the proposed observation model in real-world environments. The results show high consistency between the projection of the tracked pose and that of the real pose.
From Bench to Bedside: The First Live Robotic Surgery on the dVRK to Enable Remote Telesurgery with Motion Scaling
Sep 24, 2021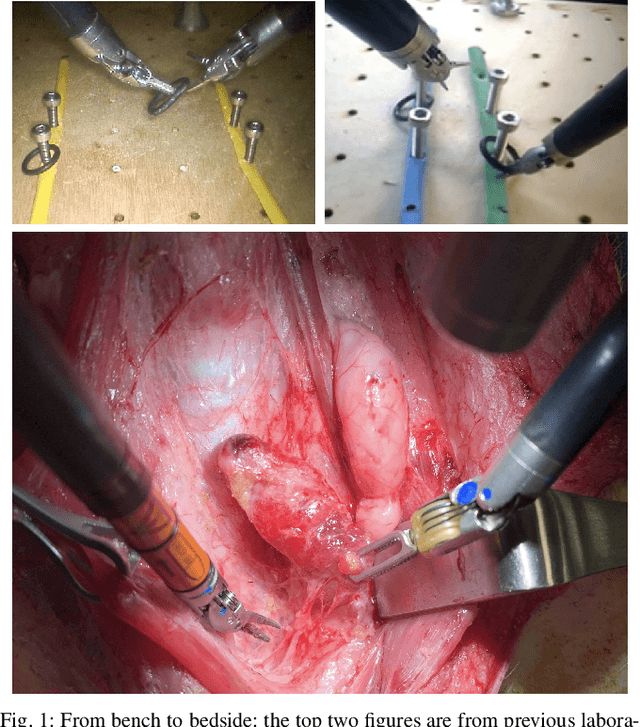
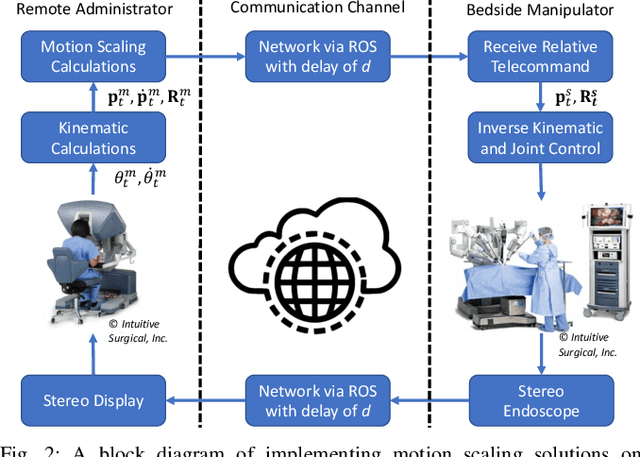
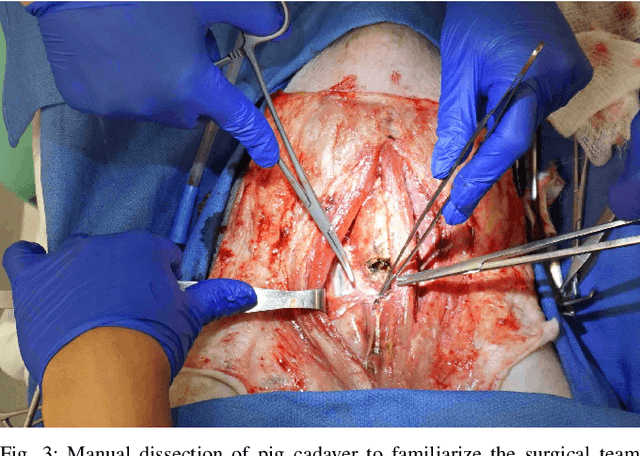
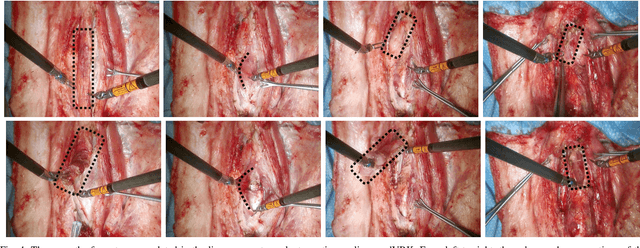
Innovations from surgical robotic research rarely translates to live surgery due to the significant difference between the lab and a live environment. Live environments require considerations that are often overlooked during early stages of research such as surgical staff, surgical procedure, and the challenges of working with live tissue. One such example is the da Vinci Research Kit (dVRK) which is used by over 40 robotics research groups and represents an open-sourced version of the da Vinci Surgical System. Despite dVRK being available for nearly a decade and the ideal candidate for translating research to practice on over 5,000 da Vinci Systems used in hospitals around the world, not one live surgery has been conducted with it. In this paper, we address the challenges, considerations, and solutions for translating surgical robotic research from bench-to-bedside. This is explained from the perspective of a remote telesurgery scenario where motion scaling solutions previously experimented in a lab setting are translated to a live pig surgery. This study presents results from the first ever use of a dVRK in a live animal and discusses how the surgical robotics community can approach translating their research to practice.
ARCSnake: Reconfigurable Snake-Like Robot with Archimedean Screw Propulsion for Multi-Domain Mobility
Jul 30, 2021
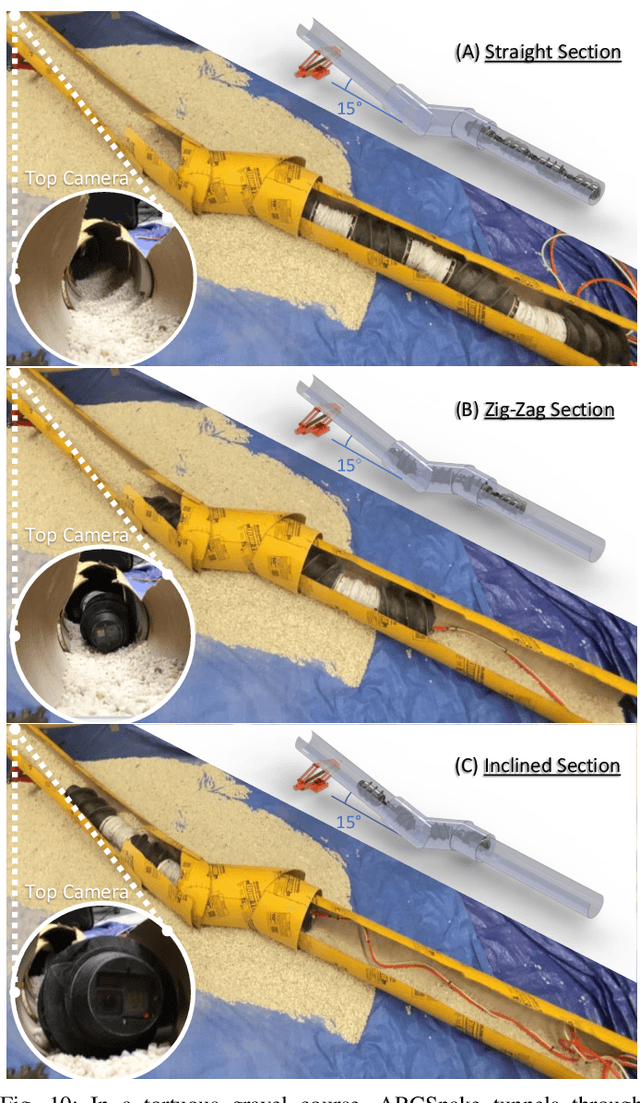
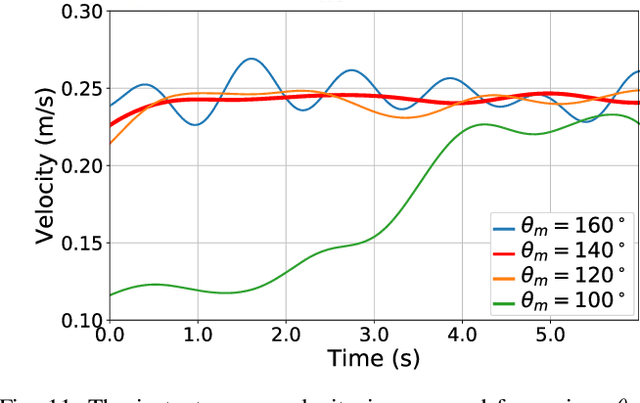
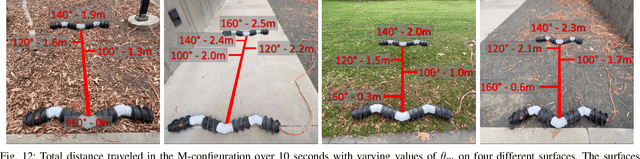
Exploring and navigating in extreme environments, such as caves, oceans, and planetary bodies, are often too hazardous for humans, and as such, robots are possible surrogates. These robots are met with significant locomotion challenges that require traversing a wide range of surface roughnesses and topologies. Previous locomotion strategies, involving wheels or ambulatory motion, such as snake platforms, have success on specific surfaces but fail in others which could be detrimental in exploration and navigation missions. In this paper, we present a novel approach that combines snake-like robots with an Archimedean screw locomotion mechanism to provide multiple, effective mobility strategies in a large range of environments, including those that are difficult to traverse for wheeled and ambulatory robots. This work develops a robotic system called ARCSnake to demonstrate this locomotion principle and tested it in a variety of different terrains and environments in order to prove its controllable, multi-domain, navigation capabilities. These tests show a wide breadth of scenarios that ARCSnake can handle, hence demonstrating its ability to traverse through extreme terrains.
Chance-Constrained Motion Planning using Modeled Distance-to-Collision Functions
Jul 22, 2021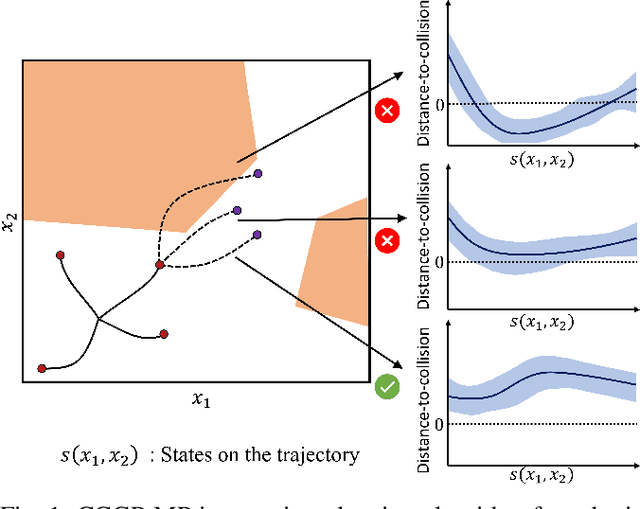
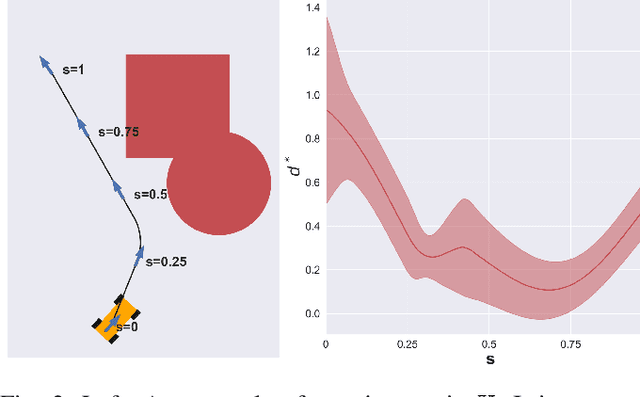
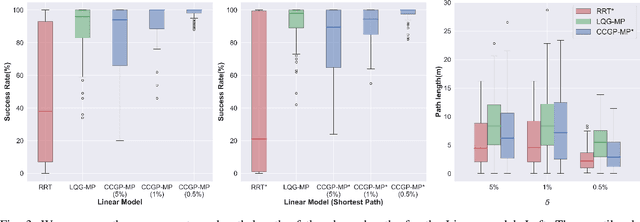
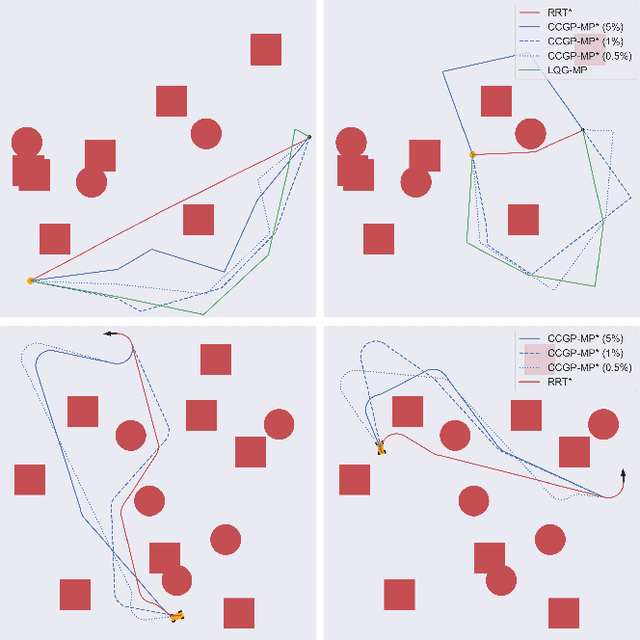
This paper introduces Chance Constrained Gaussian Process-Motion Planning (CCGP-MP), a motion planning algorithm for robotic systems under motion and state estimate uncertainties. The paper's key idea is to capture the variations in the distance-to-collision measurements caused by the uncertainty in state estimation techniques using a Gaussian Process (GP) model. We formulate the planning problem as a chance constraint problem and propose a deterministic constraint that uses the modeled distance function to verify the chance-constraints. We apply Simplicial Homology Global Optimization (SHGO) approach to find the global minimum of the deterministic constraint function along the trajectory and use the minimum value to verify the chance-constraints. Under this formulation, we can show that the optimization function is smooth under certain conditions and that SHGO converges to the global minimum. Therefore, CCGP-MP will always guarantee that all points on a planned trajectory satisfy the given chance-constraints. The experiments in this paper show that CCGP-MP can generate paths that reduce collisions and meet optimality criteria under motion and state uncertainties. The implementation of our robot models and path planning algorithm can be found on GitHub.
Motion Planning Transformers: One Model to Plan Them All
Jun 05, 2021

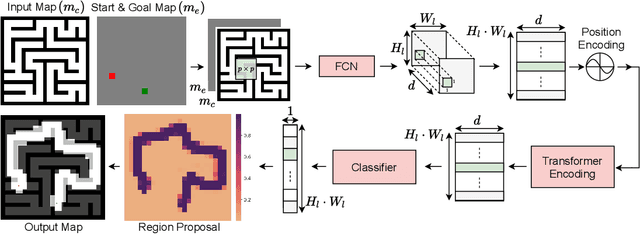
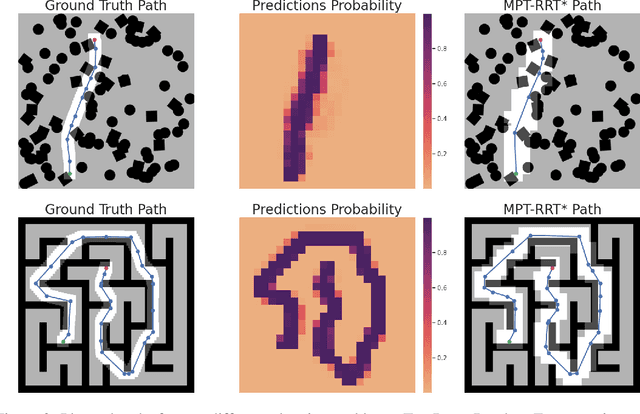
Transformers have become the powerhouse of natural language processing and recently found use in computer vision tasks. Their effective use of attention can be used in other contexts as well, and in this paper, we propose a transformer-based approach for efficiently solving the complex motion planning problems. Traditional neural network-based motion planning uses convolutional networks to encode the planning space, but these methods are limited to fixed map sizes, which is often not realistic in the real-world. Our approach first identifies regions on the map using transformers to provide attention to map areas likely to include the best path, and then applies local planners to generate the final collision-free path. We validate our method on a variety of randomly generated environments with different map sizes, demonstrating reduction in planning complexity and achieving comparable accuracy to traditional planners.