 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-Shot Constrained Motion Planning Transformers Using Learned Sampling Dictionaries
Sep 26, 2023



Constrained robot motion planning is a ubiquitous need for robots interacting with everyday environments, but it is a notoriously difficult problem to solve. Many sampled points in a sample-based planner need to be rejected as they fall outside the constraint manifold, or require significant iterative effort to correct. Given this, few solutions exist that present a constraint-satisfying trajectory for robots, in reasonable time and of low path cost. In this work, we present a transformer-based model for motion planning with task space constraints for manipulation systems. Vector Quantized-Motion Planning Transformer (VQ-MPT) is a recent learning-based model that reduces the search space for unconstrained planning for sampling-based motion planners. We propose to adapt a pre-trained VQ-MPT model to reduce the search space for constraint planning without retraining or finetuning the model. We also propose to update the neural network output to move sampling regions closer to the constraint manifold. Our experiments show how VQ-MPT improves planning times and accuracy compared to traditional planners in simulated and real-world environments. Unlike previous learning methods, which require task-related data, our method uses pre-trained neural network models and requires no additional data for training and finetuning the model making this a \textit{one-shot} process. We also tested our method on a physical Franka Panda robot with real-world sensor data, demonstrating the generalizability of our algorithm. We anticipate this approach to be an accessible and broadly useful for transferring learned neural planners to various robotic-environment interaction scenarios.
Chance-Constrained Motion Planning using Modeled Distance-to-Collision Functions
Jul 22, 2021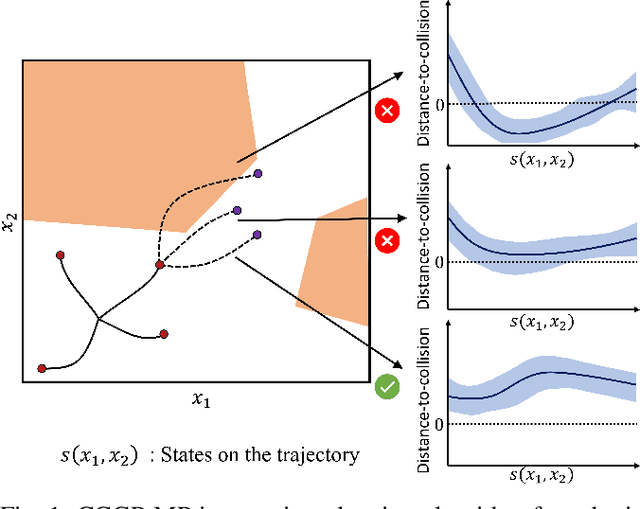
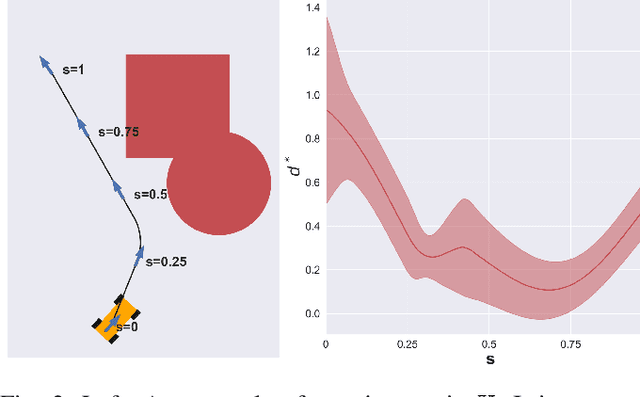
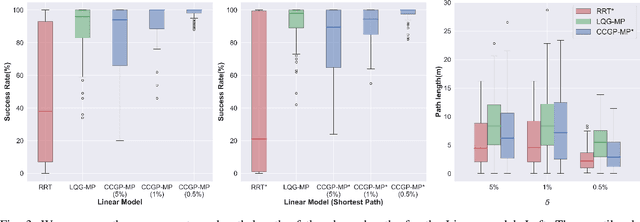
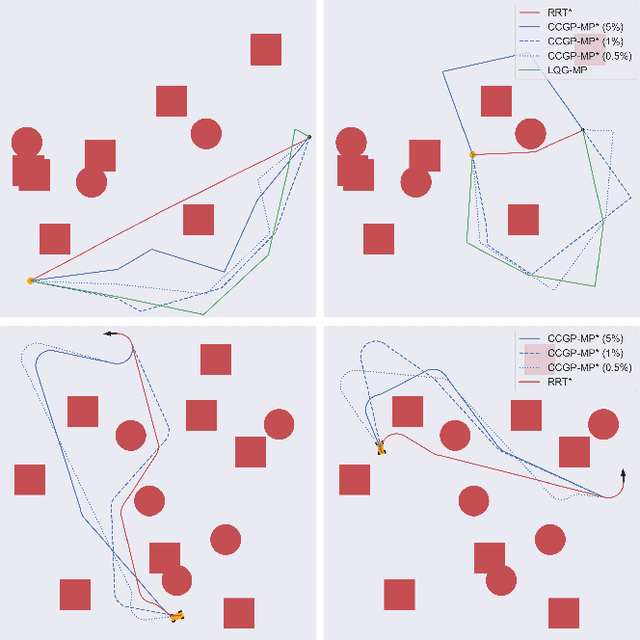
This paper introduces Chance Constrained Gaussian Process-Motion Planning (CCGP-MP), a motion planning algorithm for robotic systems under motion and state estimate uncertainties. The paper's key idea is to capture the variations in the distance-to-collision measurements caused by the uncertainty in state estimation techniques using a Gaussian Process (GP) model. We formulate the planning problem as a chance constraint problem and propose a deterministic constraint that uses the modeled distance function to verify the chance-constraints. We apply Simplicial Homology Global Optimization (SHGO) approach to find the global minimum of the deterministic constraint function along the trajectory and use the minimum value to verify the chance-constraints. Under this formulation, we can show that the optimization function is smooth under certain conditions and that SHGO converges to the global minimum. Therefore, CCGP-MP will always guarantee that all points on a planned trajectory satisfy the given chance-constraints. The experiments in this paper show that CCGP-MP can generate paths that reduce collisions and meet optimality criteria under motion and state uncertainties. The implementation of our robot models and path planning algorithm can be found on GitHub.
Motion Planning Transformers: One Model to Plan Them All
Jun 05, 2021

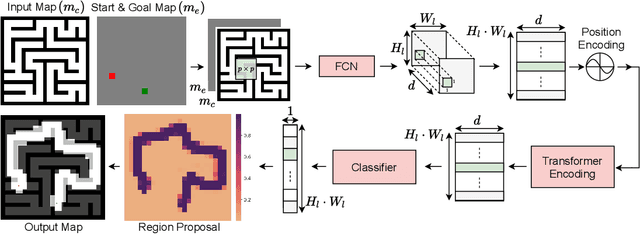
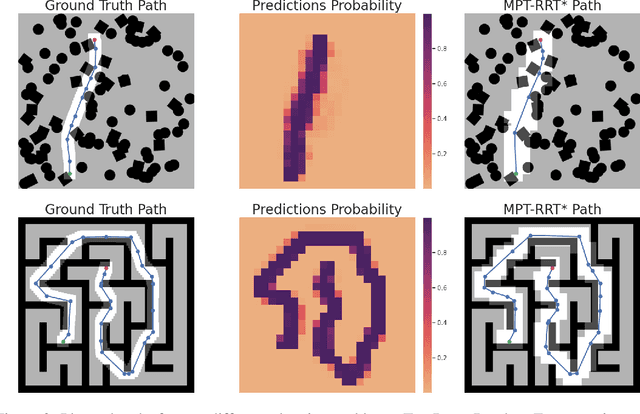
Transformers have become the powerhouse of natural language processing and recently found use in computer vision tasks. Their effective use of attention can be used in other contexts as well, and in this paper, we propose a transformer-based approach for efficiently solving the complex motion planning problems. Traditional neural network-based motion planning uses convolutional networks to encode the planning space, but these methods are limited to fixed map sizes, which is often not realistic in the real-world. Our approach first identifies regions on the map using transformers to provide attention to map areas likely to include the best path, and then applies local planners to generate the final collision-free path. We validate our method on a variety of randomly generated environments with different map sizes, demonstrating reduction in planning complexity and achieving comparable accuracy to traditional planners.
Dynamically Constrained Motion Planning Networks for Non-Holonomic Robots
Aug 12, 2020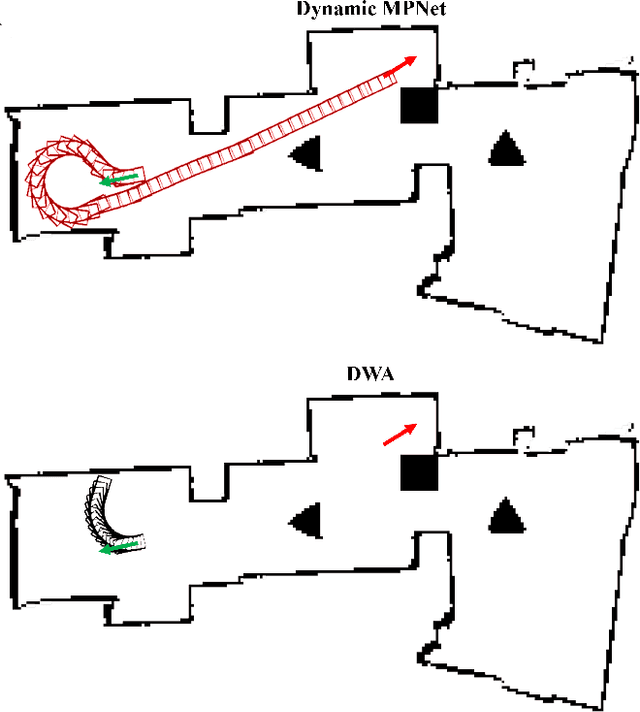
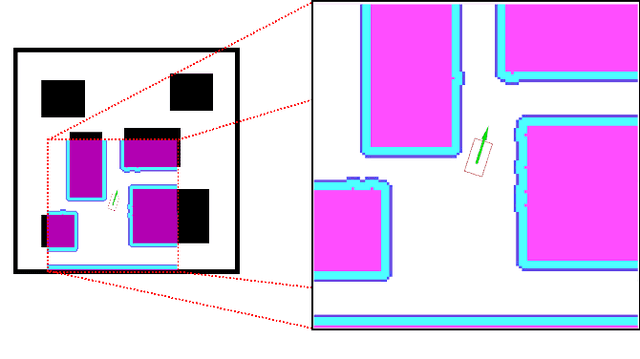
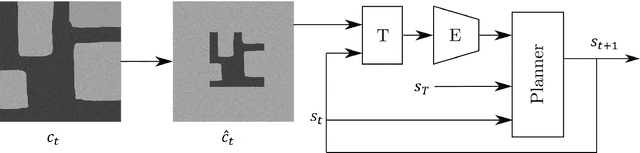
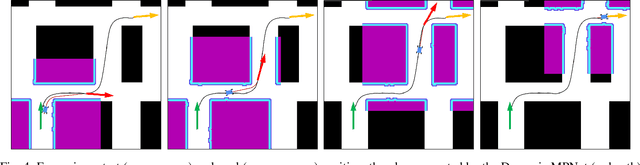
Reliable real-time planning for robots is essential in today's rapidly expanding automated ecosystem. In such environments, traditional methods that plan by relaxing constraints become unreliable or slow-down for kinematically constrained robots. This paper describes the algorithm Dynamic Motion Planning Networks (Dynamic MPNet), an extension to Motion Planning Networks, for non-holonomic robots that address the challenge of real-time motion planning using a neural planning approach. We propose modifications to the training and planning networks that make it possible for real-time planning while improving the data efficiency of training and trained models' generalizability. We evaluate our model in simulation for planning tasks for a non-holonomic robot. We also demonstrate experimental results for an indoor navigation task using a Dubins car.
Composing Ensembles of Policies with Deep Reinforcement Learning
May 25, 2019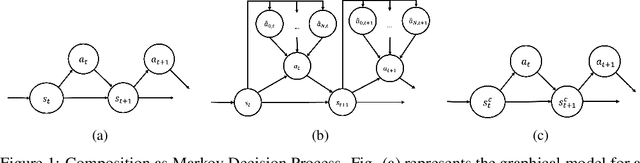

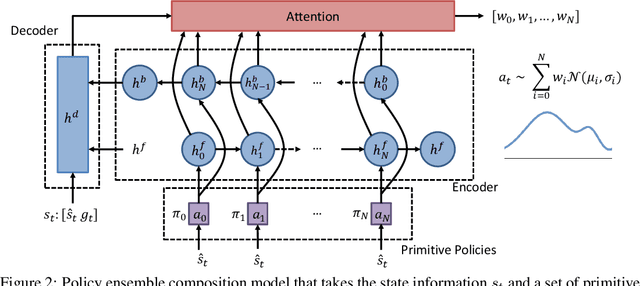
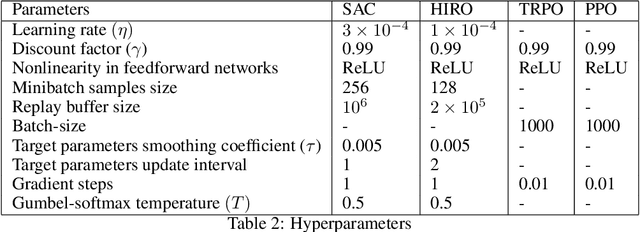
Composition of elementary skills into complex behaviors to solve challenging problems is one of the key elements toward building intelligent machines. To date, there has been plenty of work on learning new policies or skills but almost no focus on composing them to perform complex decision-making. In this paper, we propose a policy ensemble composition framework that takes the robot's primitive policies and learns to compose them concurrently or sequentially through reinforcement learning. We evaluate our method in problems where traditional approaches either fail or exhibit high sample complexity to find a solution. We show that our method not only solves the problems that require both task and motion planning but also exhibits high data efficiency, which is currently one of the main limitations of reinforcement learning.