 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBSAT: B-Spline Adaptive Tokenizer for Long-Term Time Series Forecasting
Jan 02, 2026Long-term time series forecasting using transformers is hampered by the quadratic complexity of self-attention and the rigidity of uniform patching, which may be misaligned with the data's semantic structure. In this paper, we introduce the \textit{B-Spline Adaptive Tokenizer (BSAT)}, a novel, parameter-free method that adaptively segments a time series by fitting it with B-splines. BSAT algorithmically places tokens in high-curvature regions and represents each variable-length basis function as a fixed-size token, composed of its coefficient and position. Further, we propose a hybrid positional encoding that combines a additive learnable positional encoding with Rotary Positional Embedding featuring a layer-wise learnable base: L-RoPE. This allows each layer to attend to different temporal dependencies. Our experiments on several public benchmarks show that our model is competitive with strong performance at high compression rates. This makes it particularly well-suited for use cases with strong memory constraints.
Results of the 2024 CommonRoad Motion Planning Competition for Autonomous Vehicles
Dec 22, 2025



Over the past decade, a wide range of motion planning approaches for autonomous vehicles has been developed to handle increasingly complex traffic scenarios. However, these approaches are rarely compared on standardized benchmarks, limiting the assessment of relative strengths and weaknesses. To address this gap, we present the setup and results of the 4th CommonRoad Motion Planning Competition held in 2024, conducted using the CommonRoad benchmark suite. This annual competition provides an open-source and reproducible framework for benchmarking motion planning algorithms. The benchmark scenarios span highway and urban environments with diverse traffic participants, including passenger cars, buses, and bicycles. Planner performance is evaluated along four dimensions: efficiency, safety, comfort, and compliance with selected traffic rules. This report introduces the competition format and provides a comparison of representative high-performing planners from the 2023 and 2024 editions.
From Demonstrations to Safe Deployment: Path-Consistent Safety Filtering for Diffusion Policies
Nov 09, 2025Diffusion policies (DPs) achieve state-of-the-art performance on complex manipulation tasks by learning from large-scale demonstration datasets, often spanning multiple embodiments and environments. However, they cannot guarantee safe behavior, so external safety mechanisms are needed. These, however, alter actions in ways unseen during training, causing unpredictable behavior and performance degradation. To address these problems, we propose path-consistent safety filtering (PACS) for DPs. Our approach performs path-consistent braking on a trajectory computed from the sequence of generated actions. In this way, we keep execution consistent with the policy's training distribution, maintaining the learned, task-completing behavior. To enable a real-time deployment and handle uncertainties, we verify safety using set-based reachability analysis. Our experimental evaluation in simulation and on three challenging real-world human-robot interaction tasks shows that PACS (a) provides formal safety guarantees in dynamic environments, (b) preserves task success rates, and (c) outperforms reactive safety approaches, such as control barrier functions, by up to 68% in terms of task success. Videos are available at our project website: https://tum-lsy.github.io/pacs/.
Falsification-Driven Reinforcement Learning for Maritime Motion Planning
Oct 08, 2025



Compliance with maritime traffic rules is essential for the safe operation of autonomous vessels, yet training reinforcement learning (RL) agents to adhere to them is challenging. The behavior of RL agents is shaped by the training scenarios they encounter, but creating scenarios that capture the complexity of maritime navigation is non-trivial, and real-world data alone is insufficient. To address this, we propose a falsification-driven RL approach that generates adversarial training scenarios in which the vessel under test violates maritime traffic rules, which are expressed as signal temporal logic specifications. Our experiments on open-sea navigation with two vessels demonstrate that the proposed approach provides more relevant training scenarios and achieves more consistent rule compliance.
Safe Reinforcement Learning using Action Projection: Safeguard the Policy or the Environment?
Sep 16, 2025Projection-based safety filters, which modify unsafe actions by mapping them to the closest safe alternative, are widely used to enforce safety constraints in reinforcement learning (RL). Two integration strategies are commonly considered: Safe environment RL (SE-RL), where the safeguard is treated as part of the environment, and safe policy RL (SP-RL), where it is embedded within the policy through differentiable optimization layers. Despite their practical relevance in safety-critical settings, a formal understanding of their differences is lacking. In this work, we present a theoretical comparison of SE-RL and SP-RL. We identify a key distinction in how each approach is affected by action aliasing, a phenomenon in which multiple unsafe actions are projected to the same safe action, causing information loss in the policy gradients. In SE-RL, this effect is implicitly approximated by the critic, while in SP-RL, it manifests directly as rank-deficient Jacobians during backpropagation through the safeguard. Our contributions are threefold: (i) a unified formalization of SE-RL and SP-RL in the context of actor-critic algorithms, (ii) a theoretical analysis of their respective policy gradient estimates, highlighting the role of action aliasing, and (iii) a comparative study of mitigation strategies, including a novel penalty-based improvement for SP-RL that aligns with established SE-RL practices. Empirical results support our theoretical predictions, showing that action aliasing is more detrimental for SP-RL than for SE-RL. However, with appropriate improvement strategies, SP-RL can match or outperform improved SE-RL across a range of environments. These findings provide actionable insights for choosing and refining projection-based safe RL methods based on task characteristics.
A Design Co-Pilot for Task-Tailored Manipulators
Sep 16, 2025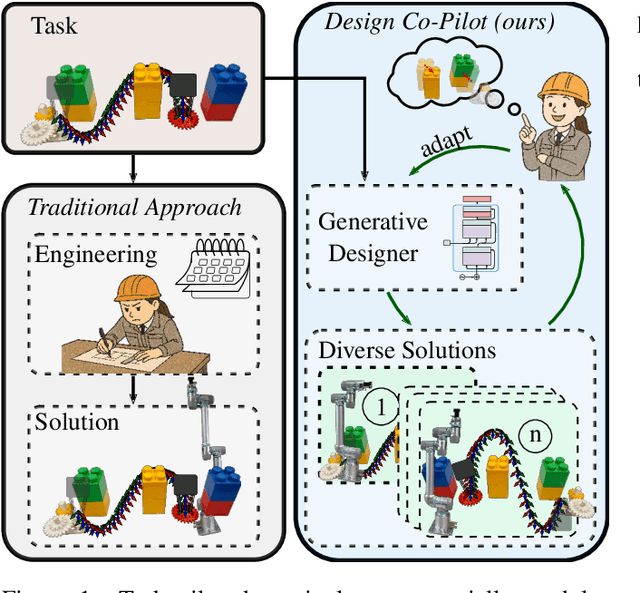
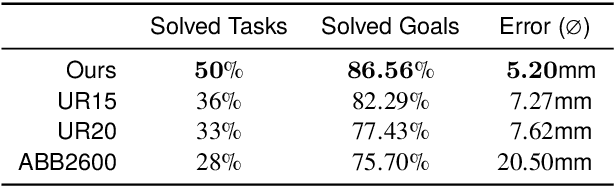
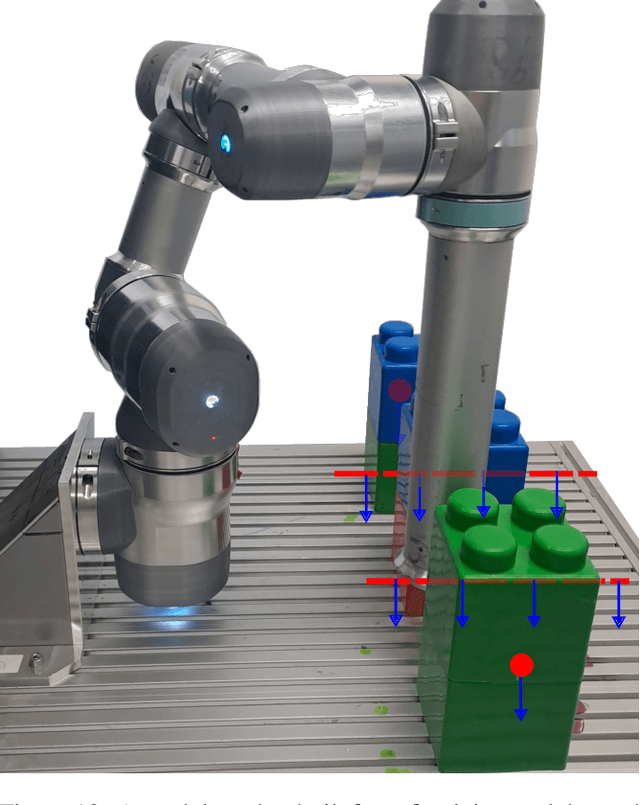
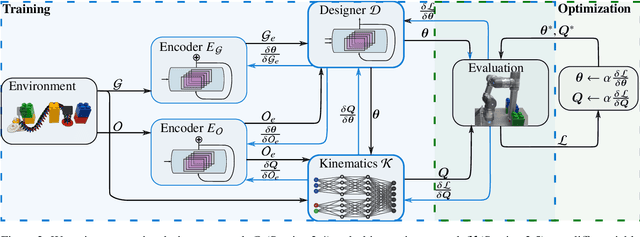
Although robotic manipulators are used in an ever-growing range of applications, robot manufacturers typically follow a ``one-fits-all'' philosophy, employing identical manipulators in various settings. This often leads to suboptimal performance, as general-purpose designs fail to exploit particularities of tasks. The development of custom, task-tailored robots is hindered by long, cost-intensive development cycles and the high cost of customized hardware. Recently, various computational design methods have been devised to overcome the bottleneck of human engineering. In addition, a surge of modular robots allows quick and economical adaptation to changing industrial settings. This work proposes an approach to automatically designing and optimizing robot morphologies tailored to a specific environment. To this end, we learn the inverse kinematics for a wide range of different manipulators. A fully differentiable framework realizes gradient-based fine-tuning of designed robots and inverse kinematics solutions. Our generative approach accelerates the generation of specialized designs from hours with optimization-based methods to seconds, serving as a design co-pilot that enables instant adaptation and effective human-AI collaboration. Numerical experiments show that our approach finds robots that can navigate cluttered environments, manipulators that perform well across a specified workspace, and can be adapted to different hardware constraints. Finally, we demonstrate the real-world applicability of our method by setting up a modular robot designed in simulation that successfully moves through an obstacle course.
Explaining, Fast and Slow: Abstraction and Refinement of Provable Explanations
Jun 10, 2025Despite significant advancements in post-hoc explainability techniques for neural networks, many current methods rely on heuristics and do not provide formally provable guarantees over the explanations provided. Recent work has shown that it is possible to obtain explanations with formal guarantees by identifying subsets of input features that are sufficient to determine that predictions remain unchanged using neural network verification techniques. Despite the appeal of these explanations, their computation faces significant scalability challenges. In this work, we address this gap by proposing a novel abstraction-refinement technique for efficiently computing provably sufficient explanations of neural network predictions. Our method abstracts the original large neural network by constructing a substantially reduced network, where a sufficient explanation of the reduced network is also provably sufficient for the original network, hence significantly speeding up the verification process. If the explanation is in sufficient on the reduced network, we iteratively refine the network size by gradually increasing it until convergence. Our experiments demonstrate that our approach enhances the efficiency of obtaining provably sufficient explanations for neural network predictions while additionally providing a fine-grained interpretation of the network's predictions across different abstraction levels.
Out of the Shadows: Exploring a Latent Space for Neural Network Verification
May 23, 2025Neural networks are ubiquitous. However, they are often sensitive to small input changes. Hence, to prevent unexpected behavior in safety-critical applications, their formal verification -- a notoriously hard problem -- is necessary. Many state-of-the-art verification algorithms use reachability analysis or abstract interpretation to enclose the set of possible outputs of a neural network. Often, the verification is inconclusive due to the conservatism of the enclosure. To address this problem, we design a novel latent space for formal verification that enables the transfer of output specifications to the input space for an iterative specification-driven input refinement, i.e., we iteratively reduce the set of possible inputs to only enclose the unsafe ones. The latent space is constructed from a novel view of projection-based set representations, e.g., zonotopes, which are commonly used in reachability analysis of neural networks. A projection-based set representation is a "shadow" of a higher-dimensional set -- a latent space -- that does not change during a set propagation through a neural network. Hence, the input set and the output enclosure are "shadows" of the same latent space that we can use to transfer constraints. We present an efficient verification tool for neural networks that uses our iterative refinement to significantly reduce the number of subproblems in a branch-and-bound procedure. Using zonotopes as a set representation, unlike many other state-of-the-art approaches, our approach can be realized by only using matrix operations, which enables a significant speed-up through efficient GPU acceleration. We demonstrate that our tool achieves competitive performance, which would place it among the top-ranking tools of the last neural network verification competition (VNN-COMP'24).
PyTupli: A Scalable Infrastructure for Collaborative Offline Reinforcement Learning Projects
May 22, 2025Offline reinforcement learning (RL) has gained traction as a powerful paradigm for learning control policies from pre-collected data, eliminating the need for costly or risky online interactions. While many open-source libraries offer robust implementations of offline RL algorithms, they all rely on datasets composed of experience tuples consisting of state, action, next state, and reward. Managing, curating, and distributing such datasets requires suitable infrastructure. Although static datasets exist for established benchmark problems, no standardized or scalable solution supports developing and sharing datasets for novel or user-defined benchmarks. To address this gap, we introduce PyTupli, a Python-based tool to streamline the creation, storage, and dissemination of benchmark environments and their corresponding tuple datasets. PyTupli includes a lightweight client library with defined interfaces for uploading and retrieving benchmarks and data. It supports fine-grained filtering at both the episode and tuple level, allowing researchers to curate high-quality, task-specific datasets. A containerized server component enables production-ready deployment with authentication, access control, and automated certificate provisioning for secure use. By addressing key barriers in dataset infrastructure, PyTupli facilitates more collaborative, reproducible, and scalable offline RL research.
Language Models That Walk the Talk: A Framework for Formal Fairness Certificates
May 19, 2025As large language models become integral to high-stakes applications, ensuring their robustness and fairness is critical. Despite their success, large language models remain vulnerable to adversarial attacks, where small perturbations, such as synonym substitutions, can alter model predictions, posing risks in fairness-critical areas, such as gender bias mitigation, and safety-critical areas, such as toxicity detection. While formal verification has been explored for neural networks, its application to large language models remains limited. This work presents a holistic verification framework to certify the robustness of transformer-based language models, with a focus on ensuring gender fairness and consistent outputs across different gender-related terms. Furthermore, we extend this methodology to toxicity detection, offering formal guarantees that adversarially manipulated toxic inputs are consistently detected and appropriately censored, thereby ensuring the reliability of moderation systems. By formalizing robustness within the embedding space, this work strengthens the reliability of language models in ethical AI deployment and content moderation.