 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStreamliners for Answer Set Programming
Apr 21, 2026Streamliner constraints reduce the search space of combinatorial problems by ruling out portions of the solution space. We adapt the StreamLLM approach, which uses Large Language Models (LLMs) to generate streamliners for Constraint Programming, to Answer Set Programming (ASP). Given an ASP encoding and a few small training instances, we prompt multiple LLMs to propose candidate constraints. Candidates that cause syntax errors, render satisfiable instances unsatisfiable, or degrade performance on all training instances are discarded. The surviving streamliners are evaluated together with the original encoding, and we report results for a virtual best encoding (VBE) that, for each instance, selects the fastest among the original encoding and its streamlined variants. On three ASP Competition benchmarks (Partner Units Problem, Sokoban, Towers of Hanoi), the VBE achieves speedups of up to 4--5x over the original encoding. Different LLMs produce semantically diverse constraints, not mere syntactic variations, indicating that the approach captures genuine problem structure.
Scalability of Reinforcement Learning Methods for Dispatching in Semiconductor Frontend Fabs: A Comparison of Open-Source Models with Real Industry Datasets
May 16, 2025Benchmark datasets are crucial for evaluating approaches to scheduling or dispatching in the semiconductor industry during the development and deployment phases. However, commonly used benchmark datasets like the Minifab or SMT2020 lack the complex details and constraints found in real-world scenarios. To mitigate this shortcoming, we compare open-source simulation models with a real industry dataset to evaluate how optimization methods scale with different levels of complexity. Specifically, we focus on Reinforcement Learning methods, performing optimization based on policy-gradient and Evolution Strategies. Our research provides insights into the effectiveness of these optimization methods and their applicability to realistic semiconductor frontend fab simulations. We show that our proposed Evolution Strategies-based method scales much better than a comparable policy-gradient-based approach. Moreover, we identify the selection and combination of relevant bottleneck tools to control by the agent as crucial for an efficient optimization. For the generalization across different loading scenarios and stochastic tool failure patterns, we achieve advantages when utilizing a diverse training dataset. While the overall approach is computationally expensive, it manages to scale well with the number of CPU cores used for training. For the real industry dataset, we achieve an improvement of up to 4% regarding tardiness and up to 1% regarding throughput. For the less complex open-source models Minifab and SMT2020, we observe double-digit percentage improvement in tardiness and single digit percentage improvement in throughput by use of Evolution Strategies.
Proceedings 40th International Conference on Logic Programming
Feb 11, 2025Since the first conference In Marseille in 1982, the International Conference on Logic Programming (ICLP) has been the premier international event for presenting research in logic programming. These proceedings include technical communications about, and abstracts for presentations given at the 40th ICLP held October 14-17, in Dallas Texas, USA. The papers and abstracts in this volume include the following areas and topics. Formal and operational semantics: including non-monotonic reasoning, probabilistic reasoning, argumentation, and semantic issues of combining logic with neural models. Language design and programming methodologies such as answer set programming. inductive logic programming, and probabilistic programming. Program analysis and logic-based validation of generated programs. Implementation methodologies including constraint implementation, tabling, Logic-based prompt engineering, and the interaction of logic programming with LLMs.
Hybrid ASP-based multi-objective scheduling of semiconductor manufacturing processes (Extended version)
Jul 28, 2023Modern semiconductor manufacturing involves intricate production processes consisting of hundreds of operations, which can take several months from lot release to completion. The high-tech machines used in these processes are diverse, operate on individual wafers, lots, or batches in multiple stages, and necessitate product-specific setups and specialized maintenance procedures. This situation is different from traditional job-shop scheduling scenarios, which have less complex production processes and machines, and mainly focus on solving highly combinatorial but abstract scheduling problems. In this work, we address the scheduling of realistic semiconductor manufacturing processes by modeling their specific requirements using hybrid Answer Set Programming with difference logic, incorporating flexible machine processing, setup, batching and maintenance operations. Unlike existing methods that schedule semiconductor manufacturing processes locally with greedy heuristics or by independently optimizing specific machine group allocations, we examine the potentials of large-scale scheduling subject to multiple optimization objectives.
Enhancing Temporal Planning Domains by Sequential Macro-actions (Extended Version)
Jul 22, 2023


Temporal planning is an extension of classical planning involving concurrent execution of actions and alignment with temporal constraints. Durative actions along with invariants allow for modeling domains in which multiple agents operate in parallel on shared resources. Hence, it is often important to avoid resource conflicts, where temporal constraints establish the consistency of concurrent actions and events. Unfortunately, the performance of temporal planning engines tends to sharply deteriorate when the number of agents and objects in a domain gets large. A possible remedy is to use macro-actions that are well-studied in the context of classical planning. In temporal planning settings, however, introducing macro-actions is significantly more challenging when the concurrent execution of actions and shared use of resources, provided the compliance to temporal constraints, should not be suppressed entirely. Our work contributes a general concept of sequential temporal macro-actions that guarantees the applicability of obtained plans, i.e., the sequence of original actions encapsulated by a macro-action is always executable. We apply our approach to several temporal planners and domains, stemming from the International Planning Competition and RoboCup Logistics League. Our experiments yield improvements in terms of obtained satisficing plans as well as plan quality for the majority of tested planners and domains.
Elementary Sets for Logic Programs
Jul 15, 2023By introducing the concepts of a loop and a loop formula, Lin and Zhao showed that the answer sets of a nondisjunctive logic program are exactly the models of its Clark's completion that satisfy the loop formulas of all loops. Recently, Gebser and Schaub showed that the Lin-Zhao theorem remains correct even if we restrict loop formulas to a special class of loops called ``elementary loops.'' In this paper, we simplify and generalize the notion of an elementary loop, and clarify its role. We propose the notion of an elementary set, which is almost equivalent to the notion of an elementary loop for nondisjunctive programs, but is simpler, and, unlike elementary loops, can be extended to disjunctive programs without producing unintuitive results. We show that the maximal unfounded elementary sets for the ``relevant'' part of a program are exactly the minimal sets among the nonempty unfounded sets. We also present a graph-theoretic characterization of elementary sets for nondisjunctive programs, which is simpler than the one proposed in (Gebser & Schaub 2005). Unlike the case of nondisjunctive programs, we show that the problem of deciding an elementary set is coNP-complete for disjunctive programs.
An End-to-End Reinforcement Learning Approach for Job-Shop Scheduling Problems Based on Constraint Programming
Jun 09, 2023Constraint Programming (CP) is a declarative programming paradigm that allows for modeling and solving combinatorial optimization problems, such as the Job-Shop Scheduling Problem (JSSP). While CP solvers manage to find optimal or near-optimal solutions for small instances, they do not scale well to large ones, i.e., they require long computation times or yield low-quality solutions. Therefore, real-world scheduling applications often resort to fast, handcrafted, priority-based dispatching heuristics to find a good initial solution and then refine it using optimization methods. This paper proposes a novel end-to-end approach to solving scheduling problems by means of CP and Reinforcement Learning (RL). In contrast to previous RL methods, tailored for a given problem by including procedural simulation algorithms, complex feature engineering, or handcrafted reward functions, our neural-network architecture and training algorithm merely require a generic CP encoding of some scheduling problem along with a set of small instances. Our approach leverages existing CP solvers to train an agent learning a Priority Dispatching Rule (PDR) that generalizes well to large instances, even from separate datasets. We evaluate our method on seven JSSP datasets from the literature, showing its ability to find higher-quality solutions for very large instances than obtained by static PDRs and by a CP solver within the same time limit.
Semiconductor Fab Scheduling with Self-Supervised and Reinforcement Learning
Feb 14, 2023Semiconductor manufacturing is a notoriously complex and costly multi-step process involving a long sequence of operations on expensive and quantity-limited equipment. Recent chip shortages and their impacts have highlighted the importance of semiconductors in the global supply chains and how reliant on those our daily lives are. Due to the investment cost, environmental impact, and time scale needed to build new factories, it is difficult to ramp up production when demand spikes. This work introduces a method to successfully learn to schedule a semiconductor manufacturing facility more efficiently using deep reinforcement and self-supervised learning. We propose the first adaptive scheduling approach to handle complex, continuous, stochastic, dynamic, modern semiconductor manufacturing models. Our method outperforms the traditional hierarchical dispatching strategies typically used in semiconductor manufacturing plants, substantially reducing each order's tardiness and time until completion. As a result, our method yields a better allocation of resources in the semiconductor manufacturing process.
Proceedings 38th International Conference on Logic Programming
Aug 04, 2022ICLP is the premier international event for presenting research in logic programming. Contributions to ICLP 2022 were sought in all areas of logic programming, including but not limited to: Foundations: Semantics, Formalisms, Nonmonotonic reasoning, Knowledge representation. Languages issues: Concurrency, Objects, Coordination, Mobility, Higher order, Types, Modes, Assertions, Modules, Meta-programming, Logic-based domain-specific languages, Programming techniques. Programming support: Program analysis, Transformation, Validation, Verification, Debugging, Profiling, Testing, Execution visualization. Implementation: Compilation, Virtual machines, Memory management, Parallel and Distributed execution, Constraint handling rules, Tabling, Foreign interfaces, User interfaces. Related Paradigms and Synergies: Inductive and coinductive logic programming, Constraint logic programming, Answer set programming, Interaction with SAT, SMT and CSP solvers, Theorem proving, Argumentation, Probabilistic programming, Machine learning. Applications: Databases, Big data, Data integration and federation, Software engineering, Natural language processing, Web and semantic web, Agents, Artificial intelligence, Computational life sciences, Cyber-security, Robotics, Education.
Problem Decomposition and Multi-shot ASP Solving for Job-shop Scheduling
May 23, 2022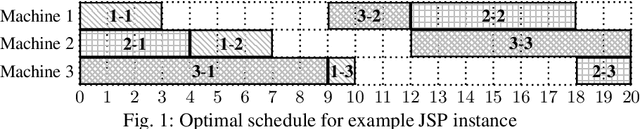
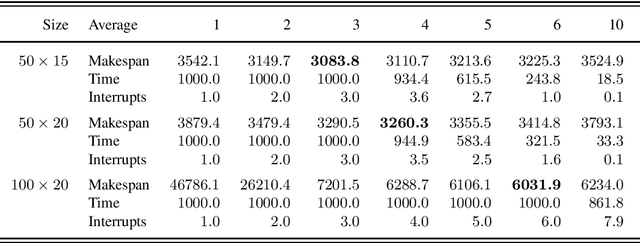
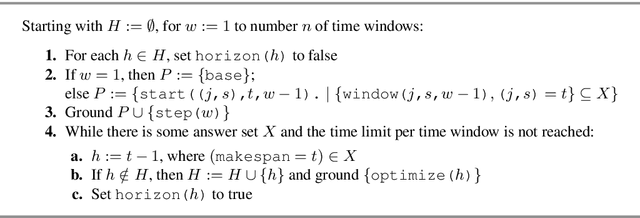
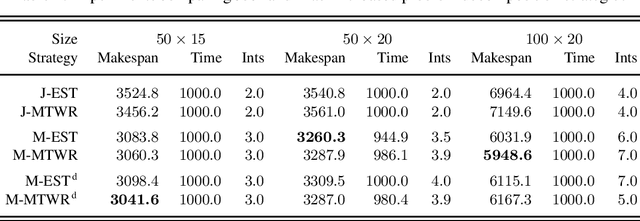
The Job-shop Scheduling Problem (JSP) is a well-known and challenging combinatorial optimization problem in which tasks sharing a machine are to be arranged in a sequence such that encompassing jobs can be completed as early as possible. In this paper, we propose problem decomposition into time windows whose operations can be successively scheduled and optimized by means of multi-shot Answer Set Programming (ASP) solving. Decomposition aims to split highly complex scheduling tasks into better manageable sub-problems with a balanced number of operations so that good quality or even optimal partial solutions can be reliably found in a small fraction of runtime. Problem decomposition must respect the precedence of operations within their jobs and partial schedules optimized by time windows should yield better global solutions than obtainable in similar runtime on the entire instance. We devise and investigate a variety of decomposition strategies in terms of the number and size of time windows as well as heuristics for choosing their operations. Moreover, we incorporate time window overlapping and compression techniques into the iterative scheduling process to counteract window-wise optimization limitations restricted to partial schedules. Our experiments on JSP benchmark sets of several sizes show that successive optimization by multi-shot ASP solving leads to substantially better schedules within the runtime limit than global optimization on the full problem, where the gap increases with the number of operations to schedule. While the obtained solution quality still remains behind a state-of-the-art Constraint Programming system, our multi-shot solving approach comes closer the larger the instance size, demonstrating good scalability by problem decomposition.