 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Chefs KISS -- Utilizing semantic information in both ICP and SLAM framework
Apr 02, 2025



For utilizing autonomous vehicle in urban areas a reliable localization is needed. Especially when HD maps are used, a precise and repeatable method has to be chosen. Therefore accurate map generation but also re-localization against these maps is necessary. Due to best 3D reconstruction of the surrounding, LiDAR has become a reliable modality for localization. The latest LiDAR odometry estimation are based on iterative closest point (ICP) approaches, namely KISS-ICP and SAGE-ICP. We extend the capabilities of KISS-ICP by incorporating semantic information into the point alignment process using a generalizable approach with minimal parameter tuning. This enhancement allows us to surpass KISS-ICP in terms of absolute trajectory error (ATE), the primary metric for map accuracy. Additionally, we improve the Cartographer mapping framework to handle semantic information. Cartographer facilitates loop closure detection over larger areas, mitigating odometry drift and further enhancing ATE accuracy. By integrating semantic information into the mapping process, we enable the filtering of specific classes, such as parked vehicles, from the resulting map. This filtering improves relocalization quality by addressing temporal changes, such as vehicles being moved.
Modular Fault Diagnosis Framework for Complex Autonomous Driving Systems
Nov 14, 2024



Fault diagnosis is crucial for complex autonomous mobile systems, especially for modern-day autonomous driving (AD). Different actors, numerous use cases, and complex heterogeneous components motivate a fault diagnosis of the system and overall system integrity. AD systems are composed of many heterogeneous components, each with different functionality and possibly using a different algorithm (e.g., rule-based vs. AI components). In addition, these components are subject to the vehicle's driving state and are highly dependent. This paper, therefore, faces this problem by presenting the concept of a modular fault diagnosis framework for AD systems. The concept suggests modular state monitoring and diagnosis elements, together with a state- and dependency-aware aggregation method. Our proposed classification scheme allows for the categorization of the fault diagnosis modules. The concept is implemented on AD shuttle buses and evaluated to demonstrate its capabilities.
Empowering Autonomous Shuttles with Next-Generation Infrastructure
Oct 28, 2024



As cities strive to address urban mobility challenges, combining autonomous transportation technologies with intelligent infrastructure presents an opportunity to transform how people move within urban environments. Autonomous shuttles are particularly suited for adaptive and responsive public transport for the first and last mile, connecting with smart infrastructure to enhance urban transit. This paper presents the concept, implementation, and evaluation of a proof-of-concept deployment of an autonomous shuttle integrated with smart infrastructure at a public fair. The infrastructure includes two perception-equipped bus stops and a connected pedestrian intersection, all linked through a central communication and control hub. Our key contributions include the development of a comprehensive system architecture for "smart" bus stops, the integration of multiple urban locations into a cohesive smart transport ecosystem, and the creation of adaptive shuttle behavior for automated driving. Additionally, we publish an open source dataset and a Vehicle-to-X (V2X) driver to support further research. Finally, we offer an outlook on future research directions and potential expansions of the demonstrated technologies and concepts.
CoCar NextGen: a Multi-Purpose Platform for Connected Autonomous Driving Research
Apr 26, 2024



Real world testing is of vital importance to the success of automated driving. While many players in the business design purpose build testing vehicles, we designed and build a modular platform that offers high flexibility for any kind of scenario. CoCar NextGen is equipped with next generation hardware that addresses all future use cases. Its extensive, redundant sensor setup allows to develop cross-domain data driven approaches that manage the transfer to other sensor setups. Together with the possibility of being deployed on public roads, this creates a unique research platform that supports the road to automated driving on SAE Level 5.
Leveraging Swarm Intelligence to Drive Autonomously: A Particle Swarm Optimization based Approach to Motion Planning
Apr 03, 2024



Motion planning is an essential part of autonomous mobile platforms. A good pipeline should be modular enough to handle different vehicles, environments, and perception modules. The planning process has to cope with all the different modalities and has to have a modular and flexible design. But most importantly, it has to be safe and robust. In this paper, we want to present our motion planning pipeline with particle swarm optimization (PSO) at its core. This solution is independent of the vehicle type and has a clear and simple-to-implement interface for perception modules. Moreover, the approach stands out for being easily adaptable to new scenarios. Parallel calculation allows for fast planning cycles. Following the principles of PSO, the trajectory planer first generates a swarm of initial trajectories that are optimized afterward. We present the underlying control space and inner workings. Finally, the application to real-world automated driving is shown in the evaluation with a deeper look at the modeling of the cost function. The approach is used in our automated shuttles that have already driven more than 3.500 km safely and entirely autonomously in sub-urban everyday traffic.
One Stack to Rule them All: To Drive Automated Vehicles, and Reach for the 4th level
Apr 03, 2024



Most automated driving functions are designed for a specific task or vehicle. Most often, the underlying architecture is fixed to specific algorithms to increase performance. Therefore, it is not possible to deploy new modules and algorithms easily. In this paper, we present our automated driving stack which combines both scalability and adaptability. Due to the modular design, our stack allows for a fast integration and testing of novel and state-of-the-art research approaches. Furthermore, it is flexible to be used for our different testing vehicles, including modified EasyMile EZ10 shuttles and different passenger cars. These vehicles differ in multiple ways, e.g. sensor setups, control systems, maximum speed, or steering angle limitations. Finally, our stack is deployed in real world environments, including passenger transport in urban areas. Our stack includes all components needed for operating an autonomous vehicle, including localization, perception, planning, controller, and additional safety modules. Our stack is developed, tested, and evaluated in real world traffic in multiple test sites, including the Test Area Autonomous Driving Baden-W\"urttemberg.
From Model-Based to Data-Driven Simulation: Challenges and Trends in Autonomous Driving
May 23, 2023Simulation is an integral part in the process of developing autonomous vehicles and advantageous for training, validation, and verification of driving functions. Even though simulations come with a series of benefits compared to real-world experiments, various challenges still prevent virtual testing from entirely replacing physical test-drives. Our work provides an overview of these challenges with regard to different aspects and types of simulation and subsumes current trends to overcome them. We cover aspects around perception-, behavior- and content-realism as well as general hurdles in the domain of simulation. Among others, we observe a trend of data-driven, generative approaches and high-fidelity data synthesis to increasingly replace model-based simulation.
KIGLIS: Smart Networks for Smart Cities
Jun 09, 2021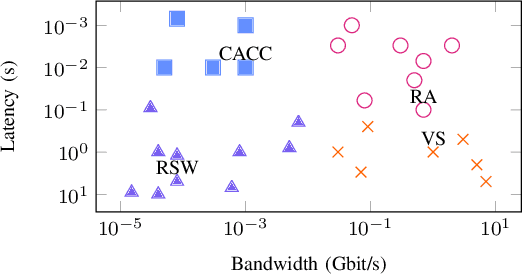
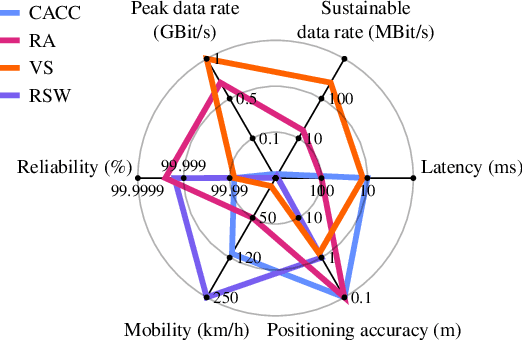
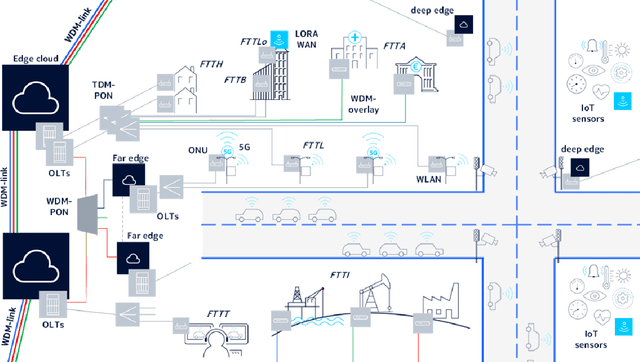
Smart cities will be characterized by a variety of intelligent and networked services, each with specific requirements for the underlying network infrastructure. While smart city architectures and services have been studied extensively, little attention has been paid to the network technology. The KIGLIS research project, consisting of a consortium of companies, universities and research institutions, focuses on artificial intelligence for optimizing fiber-optic networks of a smart city, with a special focus on future mobility applications, such as automated driving. In this paper, we present early results on our process of collecting smart city requirements for communication networks, which will lead towards reference infrastructure and architecture solutions. Finally, we suggest directions in which artificial intelligence will improve smart city networks.