 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-Guided Recurrent State-Space Neural Networks for Multi-Step Prediction
Jun 01, 2026State-space models are traditionally based on physical knowledge, but multi-step predictions from these physical models can be poor due to model inaccuracy. Black-box deep learning has shown promise as an alternative. However, these methods rely on the availability of large datasets and potentially available physical knowledge is neglected. We propose the PG-RSSNN, a physics-guided recurrent state-space neural network that incorporates recurrent structures to enable the use of non-saturating activation functions in multi-step prediction. It mitigates the vanishing gradients and eliminates the risk of numerical divergence in training seen in existing structures that feed back state estimates. Results across multiple systems with various physical model imperfections, from linear state-space models with Gaussian noise to a robotic arm and a cascaded water tank system, show that the proposed PG-RSSNN maintains stable training behavior, and improves multi-step predictions, as compared with black-box neural networks and physics-only models, even with limited training data and when physical models are only partially known.
SL(C)AMma: Simultaneous Localisation, (Calibration) and Mapping With a Magnetometer Array
Apr 21, 2026Indoor localisation techniques suffer from attenuated Global Navigation Satellite System (GNSS) signals and from the accumulation of unbounded drift by integration of proprioceptive sensors. Magnetic field-based Simultaneous Localisation and Mapping (SLAM) reduces drift through loop closures by revisiting previously seen locations, but extended exploration of unseen areas remains challenging. Recently, magnetometer arrays have demonstrated significant benefits over single magnetometers, as they can directly estimate the odometry. However, inconsistencies between magnetometer measurements negatively affect odometry estimates and complicate loop closure detection. We propose two filtering algorithms: The first focuses on magnetic field-based SLAM using a magnetometer array (SLAMma). The second extends this to jointly estimate the magnetometer calibration parameters (SLCAMma). We demonstrate, using Monte Carlo simulations, that the calibration parameters can be accurately estimated when there is sufficient orientation excitation, and that magnetometers achieve inter-sensor measurement consistency regardless of the type of motion. Experimental validation on ten datasets confirms these results, and we demonstrate that in cases where single magnetometer SLAM fails, SLAMma and SLCAMma provide good trajectory estimates with, more than 80% drift reduction compared to integration of proprioceptive sensors.
Localization Exploiting Spatial Variations in the Magnetic Field: Principles and Challenges
Feb 15, 2026Signal processing has played, and continues to play, a fundamental role in the evolution of modern localization technologies. Localization using spatial variations in the Earth's magnetic field is no exception. It relies on signal-processing methods for statistical state inference, magnetic-field modeling, and sensor calibration. Contemporary localization techniques based on spatial variations in the magnetic field can provide decimeter-level indoor localization accuracy and outdoor localization accuracy on par with strategic-grade inertial navigation systems. This article provides a broad, high-level overview of current signal-processing principles and open research challenges in localization using spatial variations in the Earth's magnetic field. The aim is to provide the reader with an understanding of the similarities and differences among existing key technologies from a statistical signal-processing perspective. To that end, existing key technologies will be presented within a common parametric signal-model framework compatible with well-established statistical inference methods.
A Tightly Coupled IMU-Based Motion Capture Approach for Estimating Multibody Kinematics and Kinetics
May 13, 2025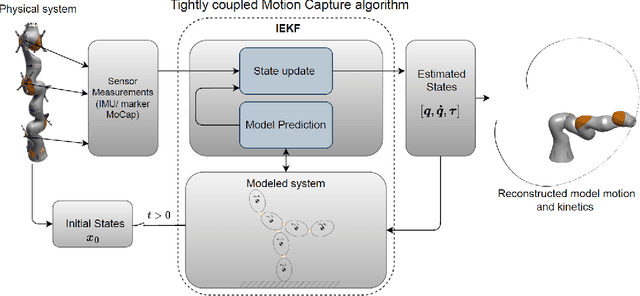



Inertial Measurement Units (IMUs) enable portable, multibody motion capture (MoCap) in diverse environments beyond the laboratory, making them a practical choice for diagnosing mobility disorders and supporting rehabilitation in clinical or home settings. However, challenges associated with IMU measurements, including magnetic distortions and drift errors, complicate their broader use for MoCap. In this work, we propose a tightly coupled motion capture approach that directly integrates IMU measurements with multibody dynamic models via an Iterated Extended Kalman Filter (IEKF) to simultaneously estimate the system's kinematics and kinetics. By enforcing kinematic and kinetic properties and utilizing only accelerometer and gyroscope data, our method improves IMU-based state estimation accuracy. Our approach is designed to allow for incorporating additional sensor data, such as optical MoCap measurements and joint torque readings, to further enhance estimation accuracy. We validated our approach using highly accurate ground truth data from a 3 Degree of Freedom (DoF) pendulum and a 6 DoF Kuka robot. We demonstrate a maximum Root Mean Square Difference (RMSD) in the pendulum's computed joint angles of 3.75 degrees compared to optical MoCap Inverse Kinematics (IK), which serves as the gold standard in the absence of internal encoders. For the Kuka robot, we observe a maximum joint angle RMSD of 3.24 degrees compared to the Kuka's internal encoders, while the maximum joint angle RMSD of the optical MoCap IK compared to the encoders was 1.16 degrees. Additionally, we report a maximum joint torque RMSD of 2 Nm in the pendulum compared to optical MoCap Inverse Dynamics (ID), and 3.73 Nm in the Kuka robot relative to its internal torque sensors.
On the Connection Between Magnetic-Field Odometry Aided Inertial Navigation and Magnetic-Field SLAM
Mar 06, 2025



Magnetic-field simultaneous localization and mapping (SLAM) using consumer-grade inertial and magnetometer sensors offers a scalable, cost-effective solution for indoor localization. However, the rapid error accumulation in the inertial navigation process limits the feasible exploratory phases of these systems. Advances in magnetometer array processing have demonstrated that odometry information, i.e., displacement and rotation information, can be extracted from local magnetic field variations and used to create magnetic-field odometry-aided inertial navigation systems. The error growth rate of these systems is significantly lower than that of standalone inertial navigation systems. This study seeks an answer to whether a magnetic-field SLAM system fed with measurements from a magnetometer array can indirectly extract odometry information -- without requiring algorithmic modifications -- and thus sustain longer exploratory phases. The theoretical analysis and simulation results show that such a system can extract odometry information and indirectly create a magnetic field odometry-aided inertial navigation system during the exploration phases. However, practical challenges related to map resolution and computational complexity remain significant.
Optimal-State Dynamics Estimation for Physics-based Human Motion Capture from Videos
Oct 10, 2024



Human motion capture from monocular videos has made significant progress in recent years. However, modern approaches often produce temporal artifacts, e.g. in form of jittery motion and struggle to achieve smooth and physically plausible motions. Explicitly integrating physics, in form of internal forces and exterior torques, helps alleviating these artifacts. Current state-of-the-art approaches make use of an automatic PD controller to predict torques and reaction forces in order to re-simulate the input kinematics, i.e. the joint angles of a predefined skeleton. However, due to imperfect physical models, these methods often require simplifying assumptions and extensive preprocessing of the input kinematics to achieve good performance. To this end, we propose a novel method to selectively incorporate the physics models with the kinematics observations in an online setting, inspired by a neural Kalman-filtering approach. We develop a control loop as a meta-PD controller to predict internal joint torques and external reaction forces, followed by a physics-based motion simulation. A recurrent neural network is introduced to realize a Kalman filter that attentively balances the kinematics input and simulated motion, resulting in an optimal-state dynamics prediction. We show that this filtering step is crucial to provide an online supervision that helps balancing the shortcoming of the respective input motions, thus being important for not only capturing accurate global motion trajectories but also producing physically plausible human poses. The proposed approach excels in the physics-based human pose estimation task and demonstrates the physical plausibility of the predictive dynamics, compared to state of the art. The code is available on https://github.com/cuongle1206/OSDCap
Tensor network square root Kalman filter for online Gaussian process regression
Sep 05, 2024



The state-of-the-art tensor network Kalman filter lifts the curse of dimensionality for high-dimensional recursive estimation problems. However, the required rounding operation can cause filter divergence due to the loss of positive definiteness of covariance matrices. We solve this issue by developing, for the first time, a tensor network square root Kalman filter, and apply it to high-dimensional online Gaussian process regression. In our experiments, we demonstrate that our method is equivalent to the conventional Kalman filter when choosing a full-rank tensor network. Furthermore, we apply our method to a real-life system identification problem where we estimate $4^{14}$ parameters on a standard laptop. The estimated model outperforms the state-of-the-art tensor network Kalman filter in terms of prediction accuracy and uncertainty quantification.
Online One-Dimensional Magnetic Field SLAM with Loop-Closure Detection
Sep 02, 2024



We present a lightweight magnetic field simultaneous localisation and mapping (SLAM) approach for drift correction in odometry paths, where the interest is purely in the odometry and not in map building. We represent the past magnetic field readings as a one-dimensional trajectory against which the current magnetic field observations are matched. This approach boils down to sequential loop-closure detection and decision-making, based on the current pose state estimate and the magnetic field. We combine this setup with a path estimation framework using an extended Kalman smoother which fuses the odometry increments with the detected loop-closure timings. We demonstrate the practical applicability of the model with several different real-world examples from a handheld iPad moving in indoor scenes.
Projecting basis functions with tensor networks for Gaussian process regression
Oct 31, 2023



This paper presents a method for approximate Gaussian process (GP) regression with tensor networks (TNs). A parametric approximation of a GP uses a linear combination of basis functions, where the accuracy of the approximation depends on the total number of basis functions $M$. We develop an approach that allows us to use an exponential amount of basis functions without the corresponding exponential computational complexity. The key idea to enable this is using low-rank TNs. We first find a suitable low-dimensional subspace from the data, described by a low-rank TN. In this low-dimensional subspace, we then infer the weights of our model by solving a Bayesian inference problem. Finally, we project the resulting weights back to the original space to make GP predictions. The benefit of our approach comes from the projection to a smaller subspace: It modifies the shape of the basis functions in a way that it sees fit based on the given data, and it allows for efficient computations in the smaller subspace. In an experiment with an 18-dimensional benchmark data set, we show the applicability of our method to an inverse dynamics problem.
Distributed multi-agent magnetic field norm SLAM with Gaussian processes
Oct 30, 2023



Accurately estimating the positions of multi-agent systems in indoor environments is challenging due to the lack of Global Navigation Satelite System (GNSS) signals. Noisy measurements of position and orientation can cause the integrated position estimate to drift without bound. Previous research has proposed using magnetic field simultaneous localization and mapping (SLAM) to compensate for position drift in a single agent. Here, we propose two novel algorithms that allow multiple agents to apply magnetic field SLAM using their own and other agents measurements. Our first algorithm is a centralized approach that uses all measurements collected by all agents in a single extended Kalman filter. This algorithm simultaneously estimates the agents position and orientation and the magnetic field norm in a central unit that can communicate with all agents at all times. In cases where a central unit is not available, and there are communication drop-outs between agents, our second algorithm is a distributed approach that can be employed. We tested both algorithms by estimating the position of magnetometers carried by three people in an optical motion capture lab with simulated odometry and simulated communication dropouts between agents. We show that both algorithms are able to compensate for drift in a case where single-agent SLAM is not. We also discuss the conditions for the estimate from our distributed algorithm to converge to the estimate from the centralized algorithm, both theoretically and experimentally. Our experiments show that, for a communication drop-out rate of 80 percent, our proposed distributed algorithm, on average, provides a more accurate position estimate than single-agent SLAM. Finally, we demonstrate the drift-compensating abilities of our centralized algorithm on a real-life pedestrian localization problem with multiple agents moving inside a building.