 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSuper Agents and Confounders: Influence of surrounding agents on vehicle trajectory prediction
Apr 03, 2026In highly interactive driving scenes, trajectory prediction is conditioned on information from surrounding traffic participants such as cars and pedestrians. Our main contribution is a comprehensive analysis of state-of-the-art trajectory predictors, which reveals a surprising and critical flaw: many surrounding agents degrade prediction accuracy rather than improve it. Using Shapley-based attribution, we rigorously demonstrate that models learn unstable and non-causal decision-making schemes that vary significantly across training runs. Building on these insights, we propose to integrate a Conditional Information Bottleneck (CIB), which does not require additional supervision and is trained to effectively compress agent features as well as ignore those that are not beneficial for the prediction task. Comprehensive experiments using multiple datasets and model architectures demonstrate that this simple yet effective approach not only improves overall trajectory prediction performance in many cases but also increases robustness to different perturbations. Our results highlight the importance of selectively integrating contextual information, which can often contain spurious or misleading signals, in trajectory prediction. Moreover, we provide interpretable metrics for identifying non-robust behavior and present a promising avenue towards a solution.
Adapting Reinforcement Learning for Path Planning in Constrained Parking Scenarios
Jan 30, 2026Real-time path planning in constrained environments remains a fundamental challenge for autonomous systems. Traditional classical planners, while effective under perfect perception assumptions, are often sensitive to real-world perception constraints and rely on online search procedures that incur high computational costs. In complex surroundings, this renders real-time deployment prohibitive. To overcome these limitations, we introduce a Deep Reinforcement Learning (DRL) framework for real-time path planning in parking scenarios. In particular, we focus on challenging scenes with tight spaces that require a high number of reversal maneuvers and adjustments. Unlike classical planners, our solution does not require ideal and structured perception, and in principle, could avoid the need for additional modules such as localization and tracking, resulting in a simpler and more practical implementation. Also, at test time, the policy generates actions through a single forward pass at each step, which is lightweight enough for real-time deployment. The task is formulated as a sequential decision-making problem grounded in a bicycle model dynamics, enabling the agent to directly learn navigation policies that respect vehicle kinematics and environmental constraints in the closed-loop setting. A new benchmark is developed to support both training and evaluation, capturing diverse and challenging scenarios. Our approach achieves state-of-the-art success rates and efficiency, surpassing classical planner baselines by +96% in success rate and +52% in efficiency. Furthermore, we release our benchmark as an open-source resource for the community to foster future research in autonomous systems. The benchmark and accompanying tools are available at https://github.com/dqm5rtfg9b-collab/Constrained_Parking_Scenarios.
ZAPP! Zonotope Agreement of Prediction and Planning for Continuous-Time Collision Avoidance with Discrete-Time Dynamics
Jun 03, 2024The past few years have seen immense progress on two fronts that are critical to safe, widespread mobile robot deployment: predicting uncertain motion of multiple agents, and planning robot motion under uncertainty. However, the numerical methods required on each front have resulted in a mismatch of representation for prediction and planning. In prediction, numerical tractability is usually achieved by coarsely discretizing time, and by representing multimodal multi-agent interactions as distributions with infinite support. On the other hand, safe planning typically requires very fine time discretization, paired with distributions with compact support, to reduce conservativeness and ensure numerical tractability. The result is, when existing predictors are coupled with planning and control, one may often find unsafe motion plans. This paper proposes ZAPP (Zonotope Agreement of Prediction and Planning) to resolve the representation mismatch. ZAPP unites a prediction-friendly coarse time discretization and a planning-friendly zonotope uncertainty representation; the method also enables differentiating through a zonotope collision check, allowing one to integrate prediction and planning within a gradient-based optimization framework. Numerical examples show how ZAPP can produce safer trajectories compared to baselines in interactive scenes.
Competitors-Aware Stochastic Lap Strategy Optimisation for Race Hybrid Vehicles
Feb 28, 2022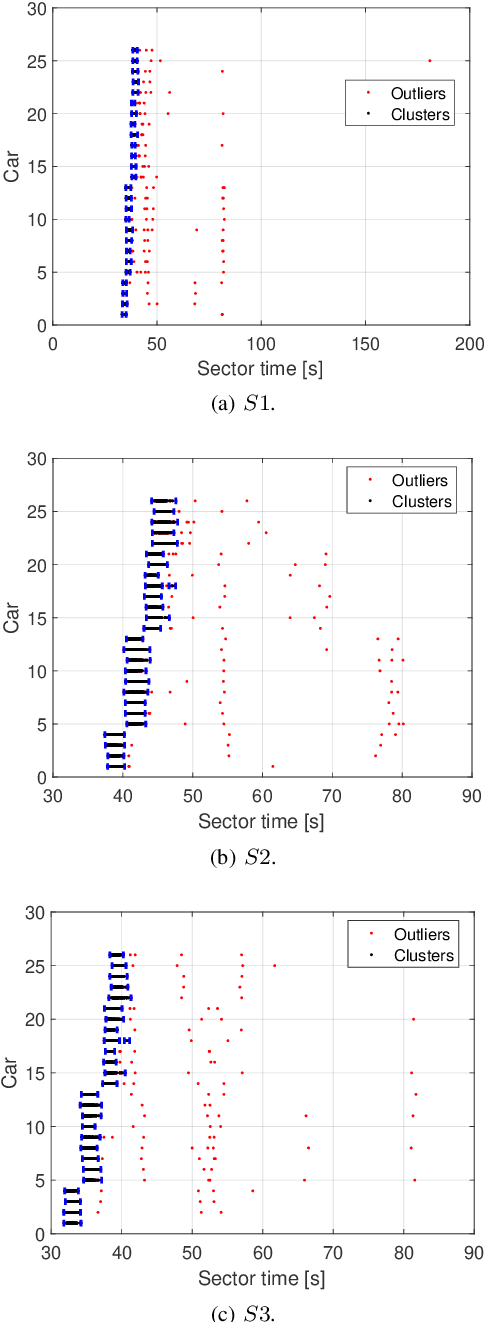
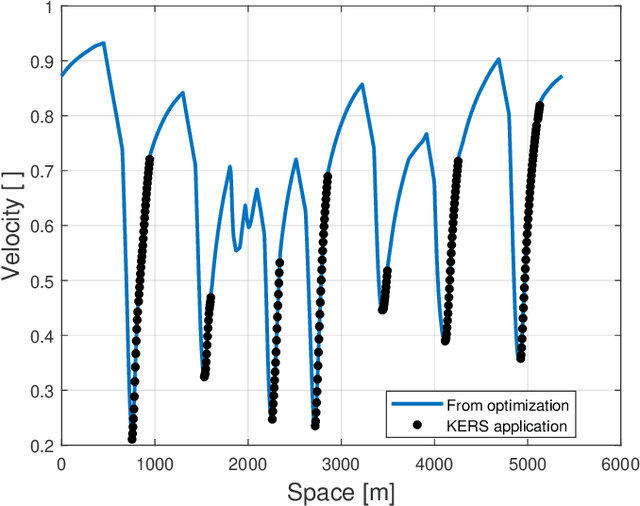
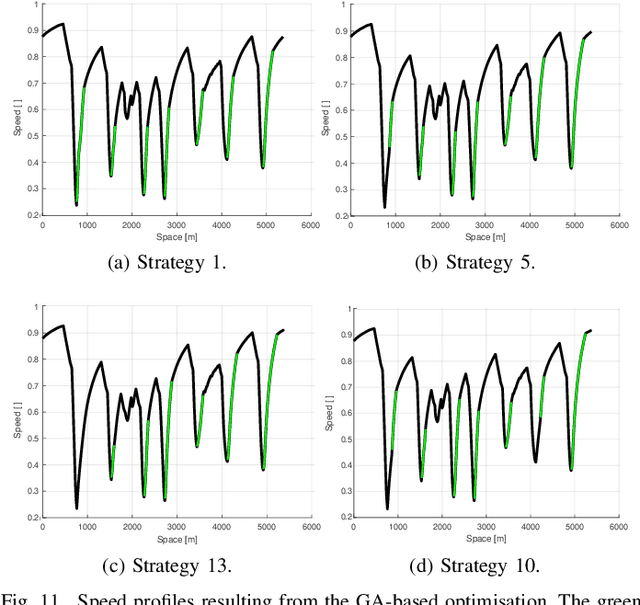
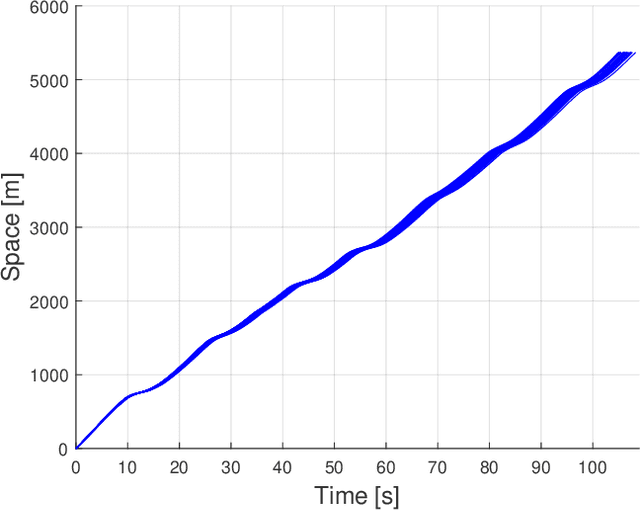
World Endurance Championship (WEC) racing events are characterised by a relevant performance gap among competitors. The fastest vehicles category, consisting in hybrid vehicles, has to respect energy usage constraints set by the technical regulation. Considering absence of competitors, i.e. traffic conditions, the optimal energy usage strategy for lap time minimisation is typically computed through a constrained optimisation problem. To the best of our knowledge, the majority of state-of-the-art works neglects competitors. This leads to a mismatch with the real world, where traffic generates considerable time losses. To bridge this gap, we propose a new framework to offline compute optimal strategies for the powertrain energy management considering competitors. Through analysis of the available data from previous events, statistics on the sector times and overtaking probabilities are extracted to encode the competitors' behaviour. Adopting a multi-agent model, the statistics are then used to generate realistic Monte Carlo (MC) simulation of their position along the track. The simulator is then adopted to identify the optimal strategy as follows. We develop a longitudinal vehicle model for the ego-vehicle and implement an optimisation problem for lap time minimisation in absence of traffic, based on Genetic Algorithms. Solving the optimisation problem for a variety of constraints generates a set of candidate optimal strategies. Stochastic Dynamic Programming is finally implemented to choose the best strategy considering competitors, whose motion is generated by the MC simulator. Our approach, validated on data from a real stint of race, allows to significantly reduce the lap time.
A Deep-Learning Framework to Predict the Dynamics of a Human-Driven Vehicle Based on the Road Geometry
Mar 05, 2021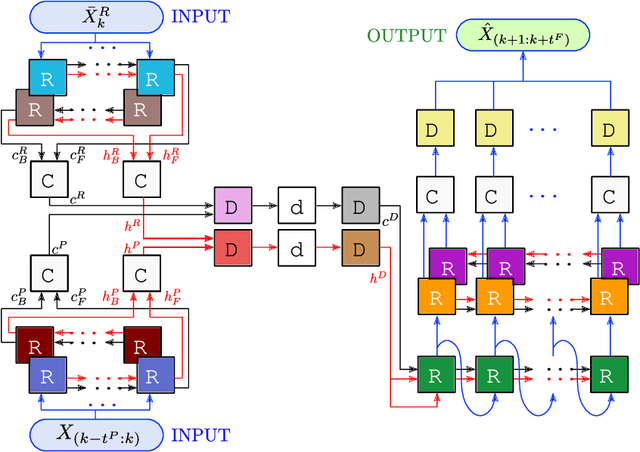
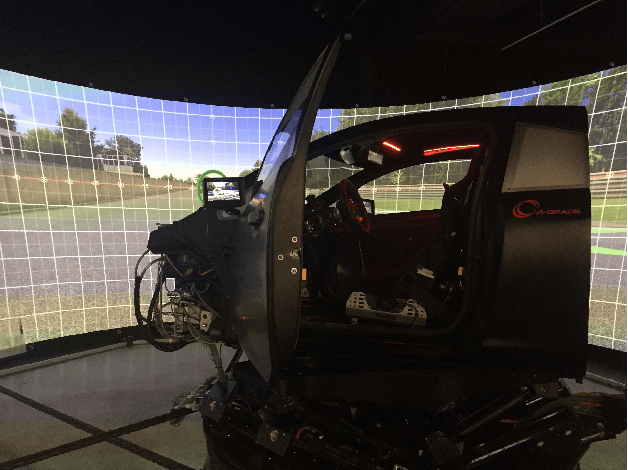
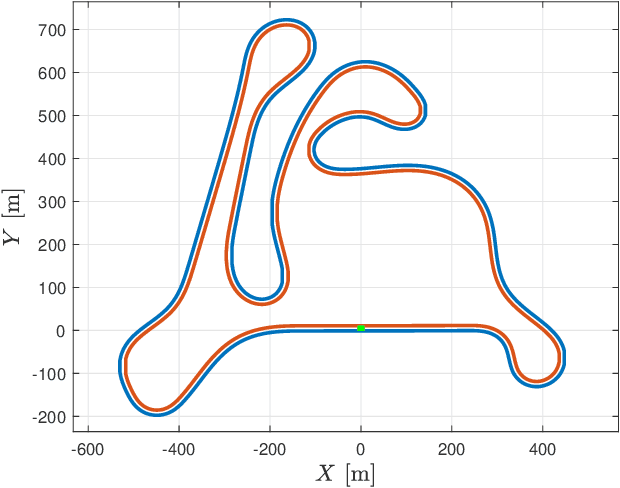
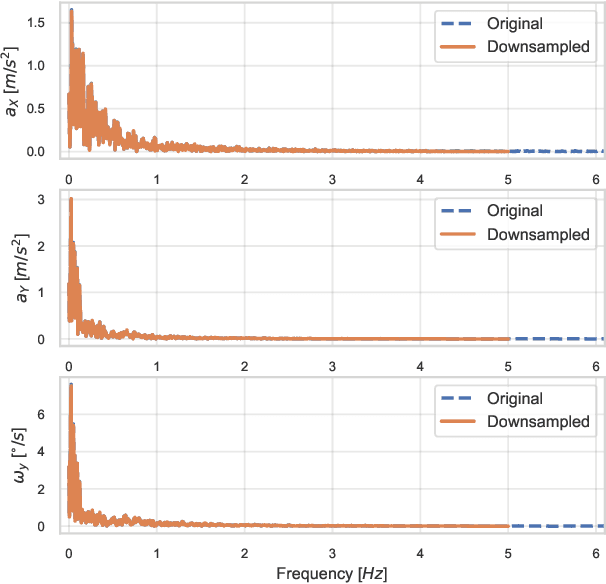
Many trajectory forecasting methods, implementing deterministic and stochastic models, have been presented in the last decade for automotive applications. In this work, a deep-learning framework is proposed to model and predict the evolution of the coupled driver-vehicle system dynamics. Particularly, we aim to describe how the road geometry affects the actions performed by the driver. Differently from other works, the problem is formulated in such a way that the user may specify the features of interest. Nonetheless, we propose a set of features that is commonly used for automotive control applications to practically show the functioning of the algorithm. To solve the prediction problem, a deep recurrent neural network based on Long Short-Term Memory autoencoders is designed. It fuses the information on the road geometry and the past driver-vehicle system dynamics to produce context-aware predictions. Also, the complexity of the neural network is constrained to favour its use in online control tasks. The efficacy of the proposed approach was verified in a case study centered on motion cueing algorithms, using a dataset collected during test sessions of a non-professional driver on a dynamic driving simulator. A 3D track with complex geometry was employed as driving environment to render the prediction task challenging. Finally, the robustness of the neural network to changes in the driver and track was investigated to set guidelines for future works.