 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLapEPI-Net: A Laplacian Pyramid EPI structure for Learning-based Dense Light Field Reconstruction
Feb 17, 2019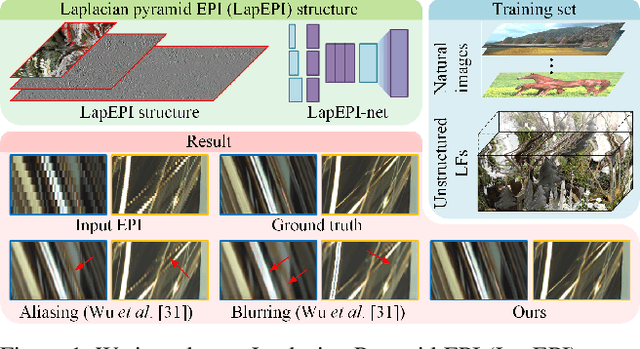
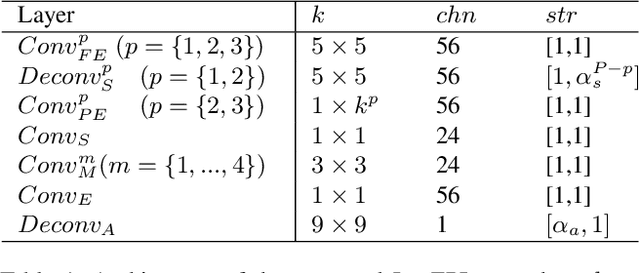
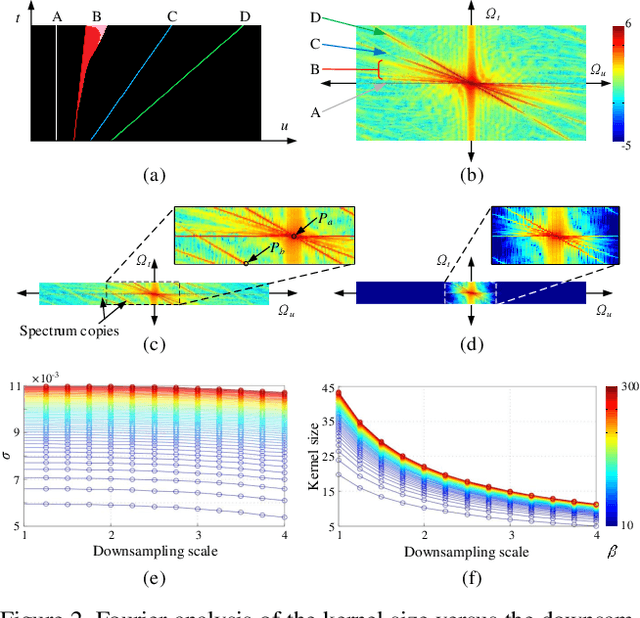
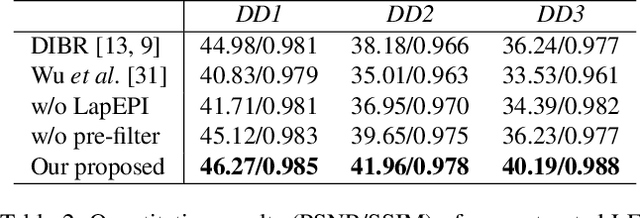
For dense sampled light field (LF) reconstruction problem, existing approaches focus on a depth-free framework to achieve non-Lambertian performance. However, they trap in the trade-off "either aliasing or blurring" problem, i.e., pre-filtering the aliasing components (caused by the angular sparsity of the input LF) always leads to a blurry result. In this paper, we intend to solve this challenge by introducing an elaborately designed epipolar plane image (EPI) structure within a learning-based framework. Specifically, we start by analytically showing that decreasing the spatial scale of an EPI shows higher efficiency in addressing the aliasing problem than simply adopting pre-filtering. Accordingly, we design a Laplacian Pyramid EPI (LapEPI) structure that contains both low spatial scale EPI (for aliasing) and high-frequency residuals (for blurring) to solve the trade-off problem. We then propose a novel network architecture for the LapEPI structure, termed as LapEPI-net. To ensure the non-Lambertian performance, we adopt a transfer-learning strategy by first pre-training the network with natural images then fine-tuning it with unstructured LFs. Extensive experiments demonstrate the high performance and robustness of the proposed approach for tackling the aliasing-or-blurring problem as well as the non-Lambertian reconstruction.
SPI-Optimizer: an integral-Separated PI Controller for Stochastic Optimization
Dec 29, 2018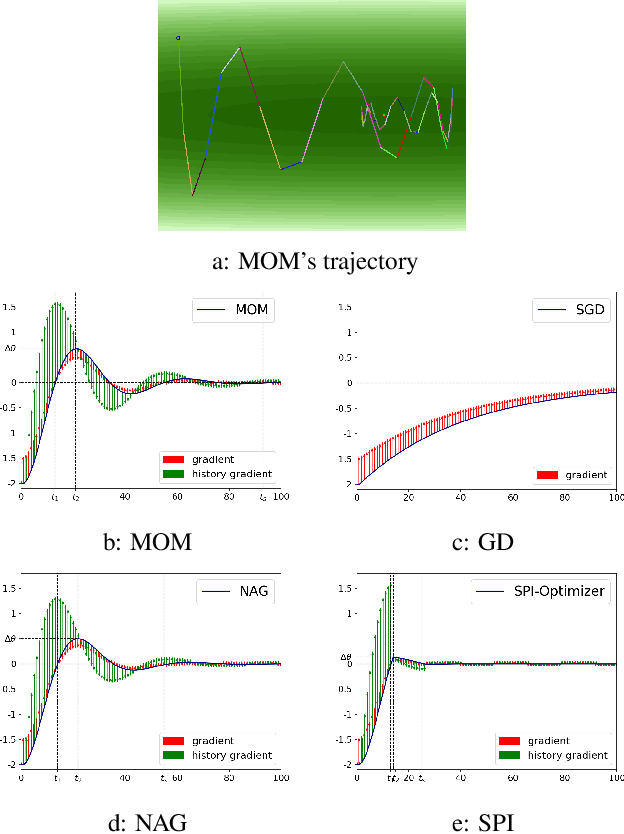
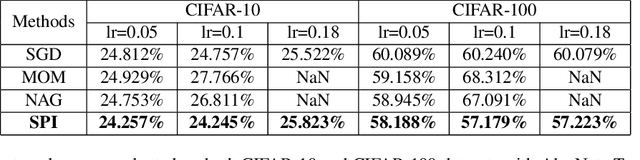
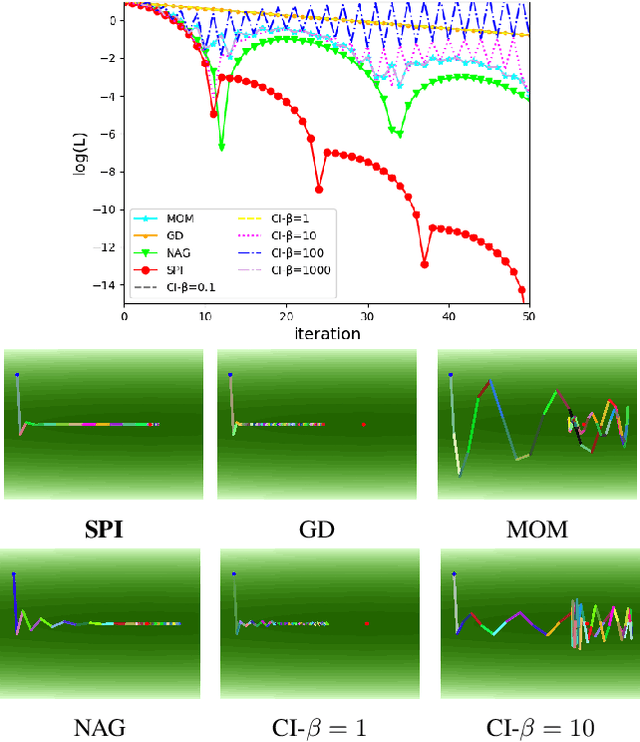
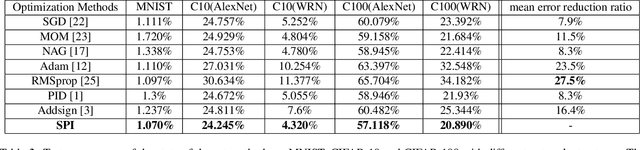
To overcome the oscillation problem in the classical momentum-based optimizer, recent work associates it with the proportional-integral (PI) controller, and artificially adds D term producing a PID controller. It suppresses oscillation with the sacrifice of introducing extra hyper-parameter. In this paper, we start by analyzing: why momentum-based method oscillates about the optimal point? and answering that: the fluctuation problem relates to the lag effect of integral (I) term. Inspired by the conditional integration idea in classical control society, we propose SPI-Optimizer, an integral-Separated PI controller based optimizer WITHOUT introducing extra hyperparameter. It separates momentum term adaptively when the inconsistency of current and historical gradient direction occurs. Extensive experiments demonstrate that SPIOptimizer generalizes well on popular network architectures to eliminate the oscillation, and owns competitive performance with faster convergence speed (up to 40% epochs reduction ratio ) and more accurate classification result on MNIST, CIFAR10, and CIFAR100 (up to 27.5% error reduction ratio) than the state-of-the-art methods.
RegNet: Learning the Optimization of Direct Image-to-Image Pose Registration
Dec 26, 2018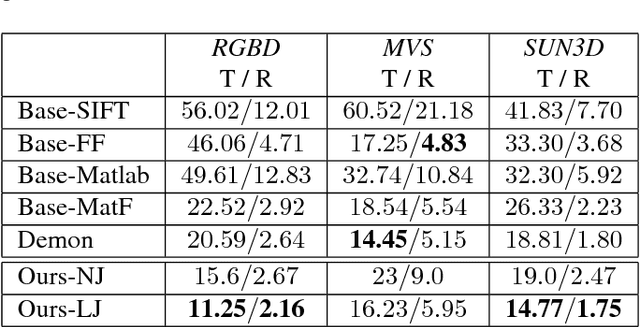
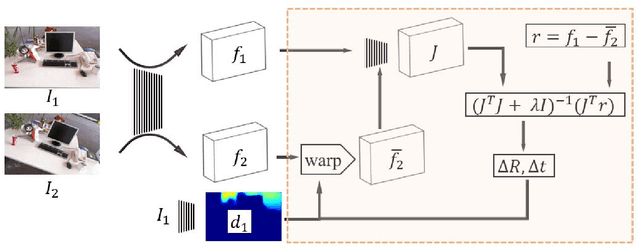
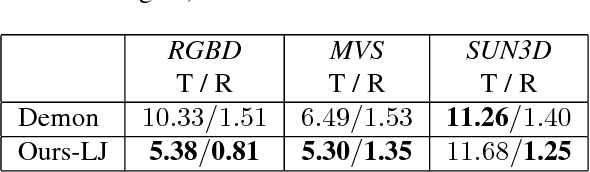
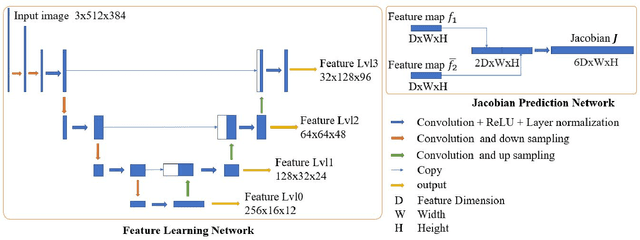
Direct image-to-image alignment that relies on the optimization of photometric error metrics suffers from limited convergence range and sensitivity to lighting conditions. Deep learning approaches has been applied to address this problem by learning better feature representations using convolutional neural networks, yet still require a good initialization. In this paper, we demonstrate that the inaccurate numerical Jacobian limits the convergence range which could be improved greatly using learned approaches. Based on this observation, we propose a novel end-to-end network, RegNet, to learn the optimization of image-to-image pose registration. By jointly learning feature representation for each pixel and partial derivatives that replace handcrafted ones (e.g., numerical differentiation) in the optimization step, the neural network facilitates end-to-end optimization. The energy landscape is constrained on both the feature representation and the learned Jacobian, hence providing more flexibility for the optimization as a consequence leads to more robust and faster convergence. In a series of experiments, including a broad ablation study, we demonstrate that RegNet is able to converge for large-baseline image pairs with fewer iterations.
CrossNet: An End-to-end Reference-based Super Resolution Network using Cross-scale Warping
Jul 27, 2018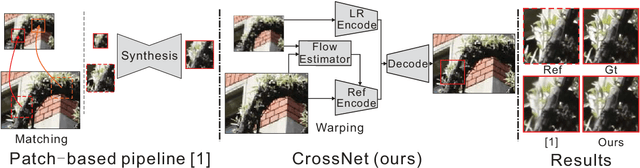
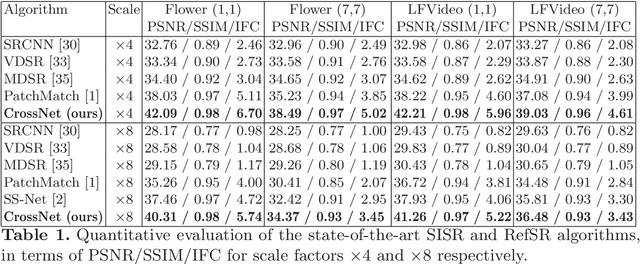
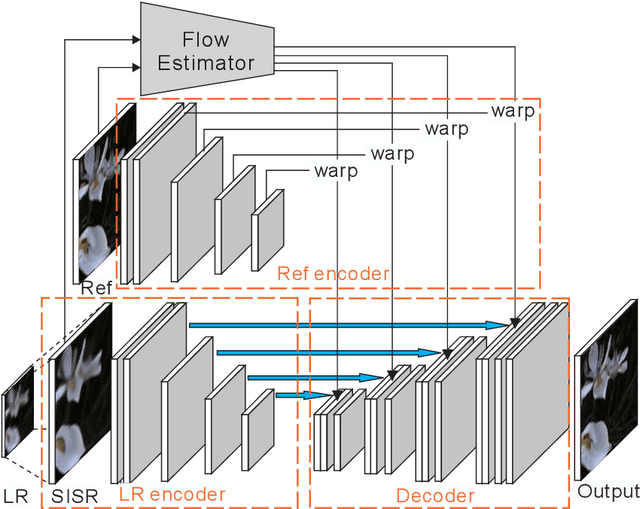
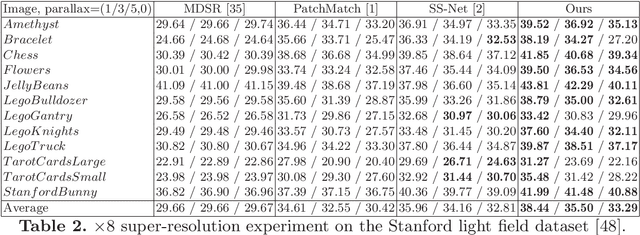
The Reference-based Super-resolution (RefSR) super-resolves a low-resolution (LR) image given an external high-resolution (HR) reference image, where the reference image and LR image share similar viewpoint but with significant resolution gap x8. Existing RefSR methods work in a cascaded way such as patch matching followed by synthesis pipeline with two independently defined objective functions, leading to the inter-patch misalignment, grid effect and inefficient optimization. To resolve these issues, we present CrossNet, an end-to-end and fully-convolutional deep neural network using cross-scale warping. Our network contains image encoders, cross-scale warping layers, and fusion decoder: the encoder serves to extract multi-scale features from both the LR and the reference images; the cross-scale warping layers spatially aligns the reference feature map with the LR feature map; the decoder finally aggregates feature maps from both domains to synthesize the HR output. Using cross-scale warping, our network is able to perform spatial alignment at pixel-level in an end-to-end fashion, which improves the existing schemes both in precision (around 2dB-4dB) and efficiency (more than 100 times faster).
Beyond SIFT using Binary features for Loop Closure Detection
Sep 18, 2017
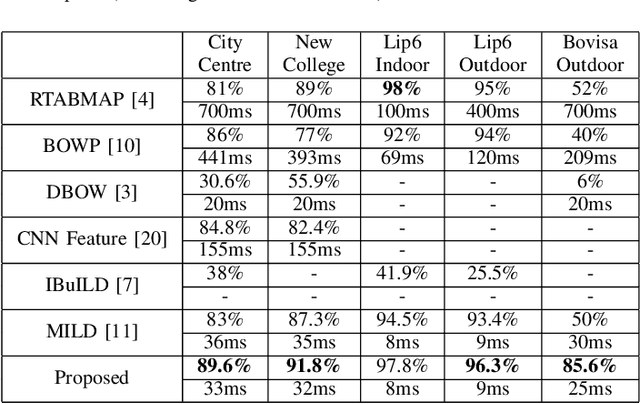
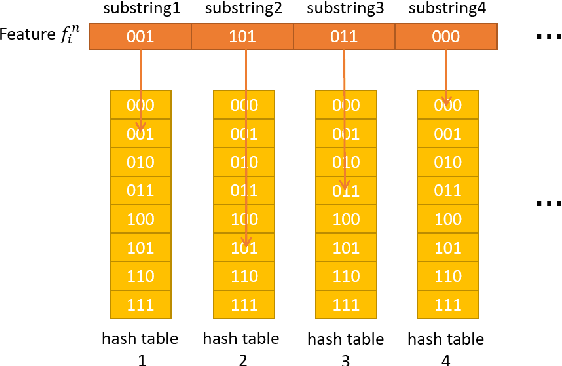
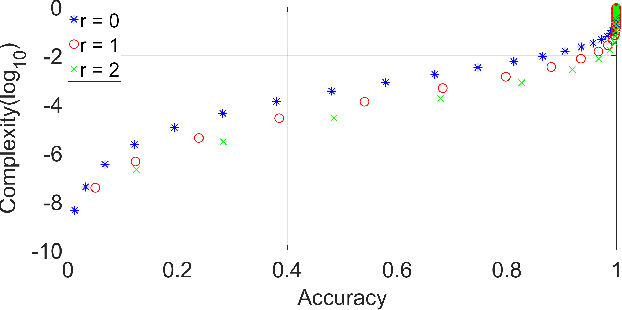
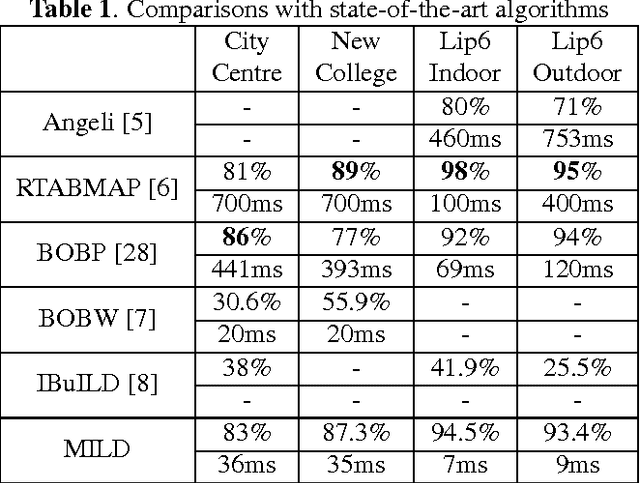
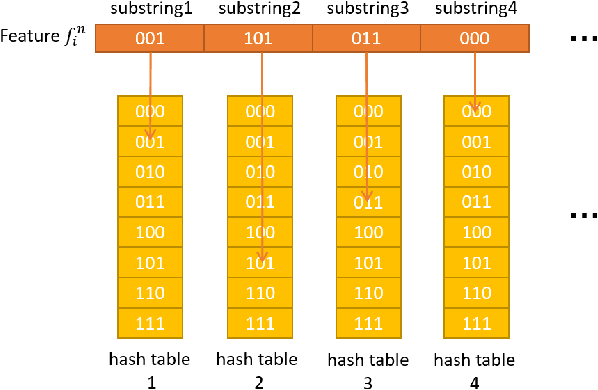
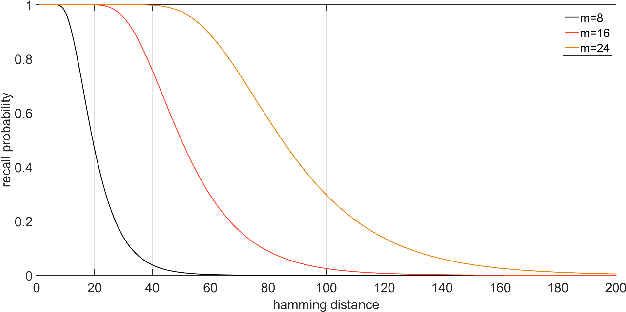
In this paper a binary feature based Loop Closure Detection (LCD) method is proposed, which for the first time achieves higher precision-recall (PR) performance compared with state-of-the-art SIFT feature based approaches. The proposed system originates from our previous work Multi-Index hashing for Loop closure Detection (MILD), which employs Multi-Index Hashing (MIH)~\cite{greene1994multi} for Approximate Nearest Neighbor (ANN) search of binary features. As the accuracy of MILD is limited by repeating textures and inaccurate image similarity measurement, burstiness handling is introduced to solve this problem and achieves considerable accuracy improvement. Additionally, a comprehensive theoretical analysis on MIH used in MILD is conducted to further explore the potentials of hashing methods for ANN search of binary features from probabilistic perspective. This analysis provides more freedom on best parameter choosing in MIH for different application scenarios. Experiments on popular public datasets show that the proposed approach achieved the highest accuracy compared with state-of-the-art while running at 30Hz for databases containing thousands of images.
SurfaceNet: An End-to-end 3D Neural Network for Multiview Stereopsis
Aug 05, 2017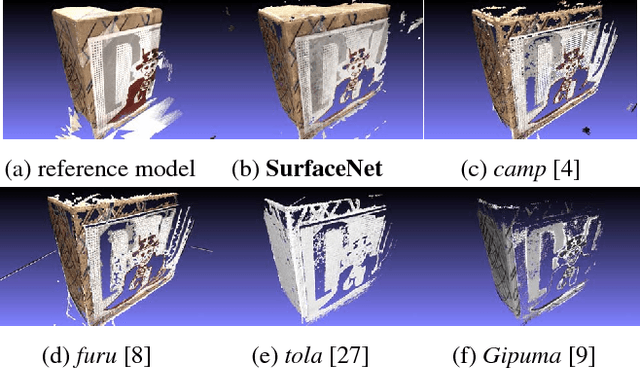
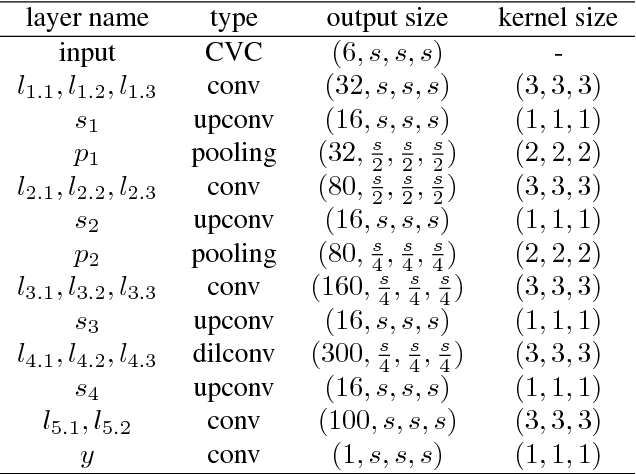
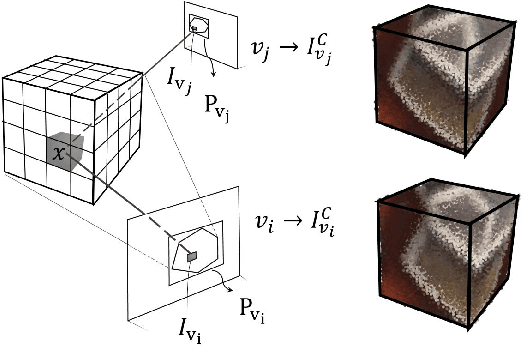
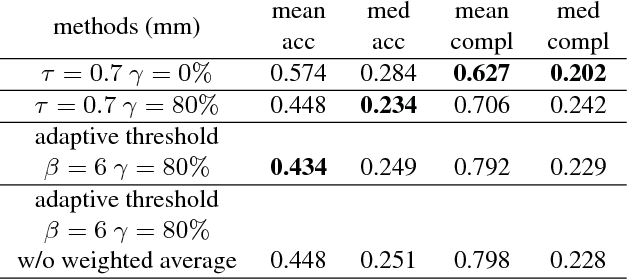
This paper proposes an end-to-end learning framework for multiview stereopsis. We term the network SurfaceNet. It takes a set of images and their corresponding camera parameters as input and directly infers the 3D model. The key advantage of the framework is that both photo-consistency as well geometric relations of the surface structure can be directly learned for the purpose of multiview stereopsis in an end-to-end fashion. SurfaceNet is a fully 3D convolutional network which is achieved by encoding the camera parameters together with the images in a 3D voxel representation. We evaluate SurfaceNet on the large-scale DTU benchmark.
MILD: Multi-Index hashing for Loop closure Detection
Feb 28, 2017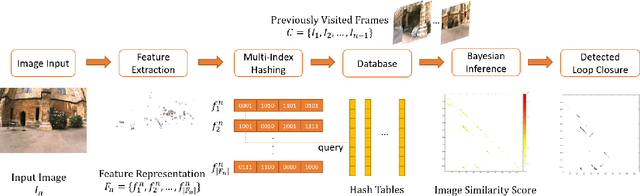
Loop Closure Detection (LCD) has been proved to be extremely useful in global consistent visual Simultaneously Localization and Mapping (SLAM) and appearance-based robot relocalization. Methods exploiting binary features in bag of words representation have recently gained a lot of popularity for their efficiency, but suffer from low recall due to the inherent drawback that high dimensional binary feature descriptors lack well-defined centroids. In this paper, we propose a realtime LCD approach called MILD (Multi-Index Hashing for Loop closure Detection), in which image similarity is measured by feature matching directly to achieve high recall without introducing extra computational complexity with the aid of Multi-Index Hashing (MIH). A theoretical analysis of the approximate image similarity measurement using MIH is presented, which reveals the trade-off between efficiency and accuracy from a probabilistic perspective. Extensive comparisons with state-of-the-art LCD methods demonstrate the superiority of MILD in both efficiency and accuracy.
Utilizing High-level Visual Feature for Indoor Shopping Mall Navigation
Feb 18, 2017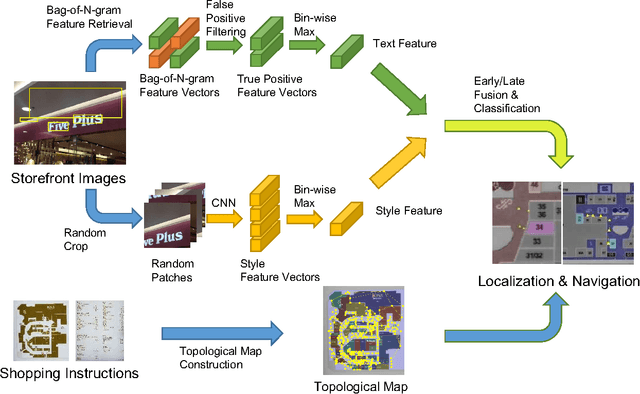
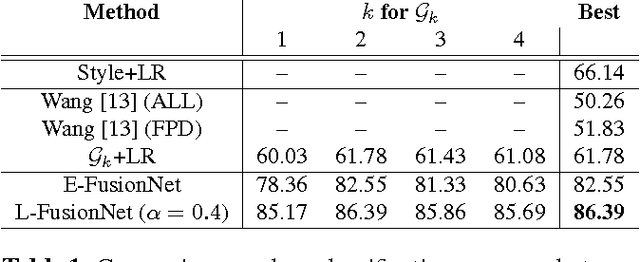
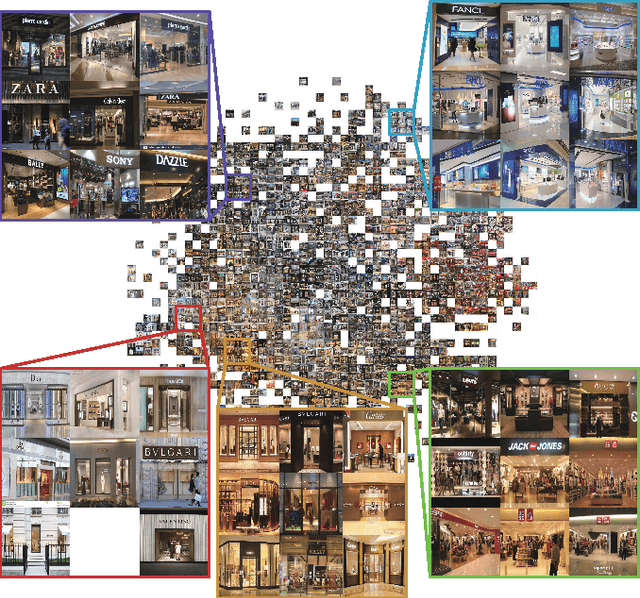
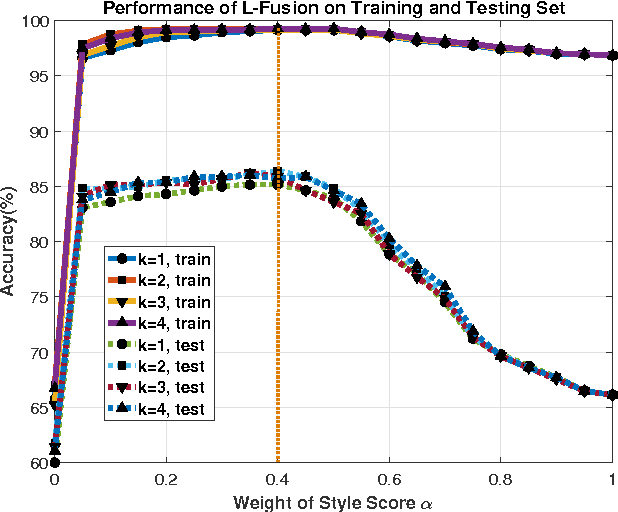
Towards robust and convenient indoor shopping mall navigation, we propose a novel learning-based scheme to utilize the high-level visual information from the storefront images captured by personal devices of users. Specifically, we decompose the visual navigation problem into localization and map generation respectively. Given a storefront input image, a novel feature fusion scheme (denoted as FusionNet) is proposed by fusing the distinguishing DNN-based appearance feature and text feature for robust recognition of store brands, which serves for accurate localization. Regarding the map generation, we convert the user-captured indicator map of the shopping mall into a topological map by parsing the stores and their connectivity. Experimental results conducted on the real shopping malls demonstrate that the proposed system achieves robust localization and precise map generation, enabling accurate navigation.
FlyCap: Markerless Motion Capture Using Multiple Autonomous Flying Cameras
Nov 29, 2016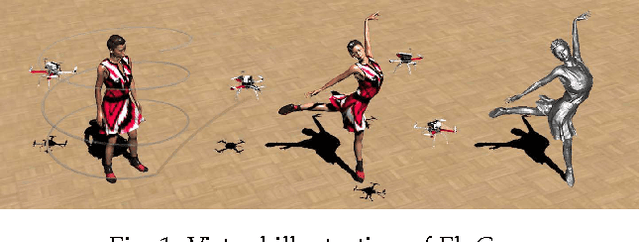
Aiming at automatic, convenient and non-instrusive motion capture, this paper presents a new generation markerless motion capture technique, the FlyCap system, to capture surface motions of moving characters using multiple autonomous flying cameras (autonomous unmanned aerial vehicles(UAV) each integrated with an RGBD video camera). During data capture, three cooperative flying cameras automatically track and follow the moving target who performs large scale motions in a wide space. We propose a novel non-rigid surface registration method to track and fuse the depth of the three flying cameras for surface motion tracking of the moving target, and simultaneously calculate the pose of each flying camera. We leverage the using of visual-odometry information provided by the UAV platform, and formulate the surface tracking problem in a non-linear objective function that can be linearized and effectively minimized through a Gaussian-Newton method. Quantitative and qualitative experimental results demonstrate the competent and plausible surface and motion reconstruction results
Deep Learning for Surface Material Classification Using Haptic And Visual Information
May 01, 2016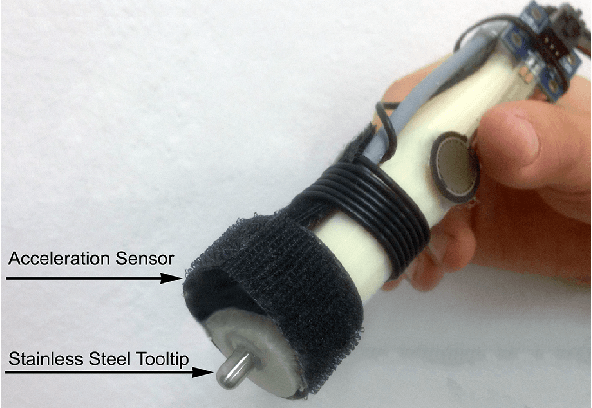
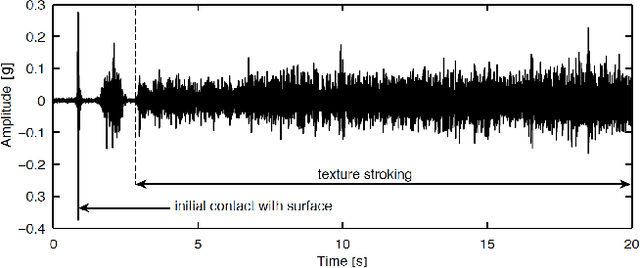
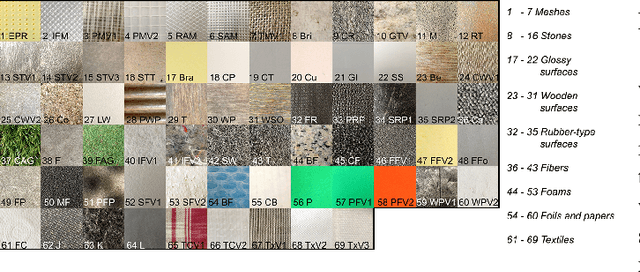
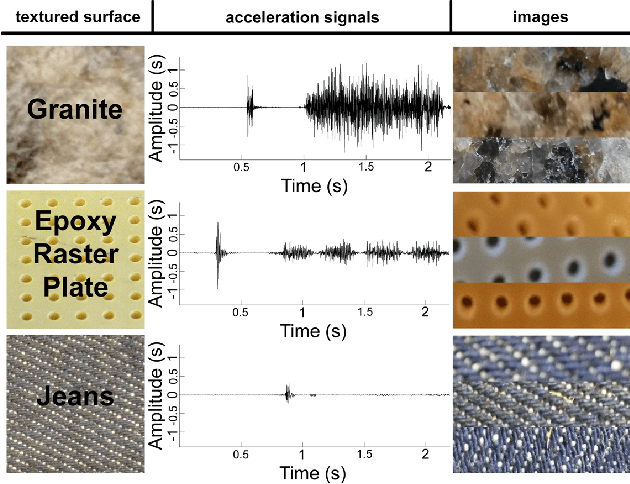
When a user scratches a hand-held rigid tool across an object surface, an acceleration signal can be captured, which carries relevant information about the surface. More importantly, such a haptic signal is complementary to the visual appearance of the surface, which suggests the combination of both modalities for the recognition of the surface material. In this paper, we present a novel deep learning method dealing with the surface material classification problem based on a Fully Convolutional Network (FCN), which takes as input the aforementioned acceleration signal and a corresponding image of the surface texture. Compared to previous surface material classification solutions, which rely on a careful design of hand-crafted domain-specific features, our method automatically extracts discriminative features utilizing the advanced deep learning methodologies. Experiments performed on the TUM surface material database demonstrate that our method achieves state-of-the-art classification accuracy robustly and efficiently.