 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadricSLAM: Dual Quadrics from Object Detections as Landmarks in Object-oriented SLAM
Aug 16, 2018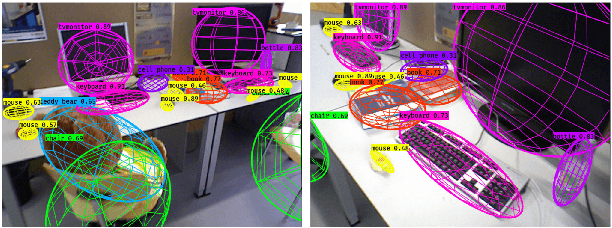
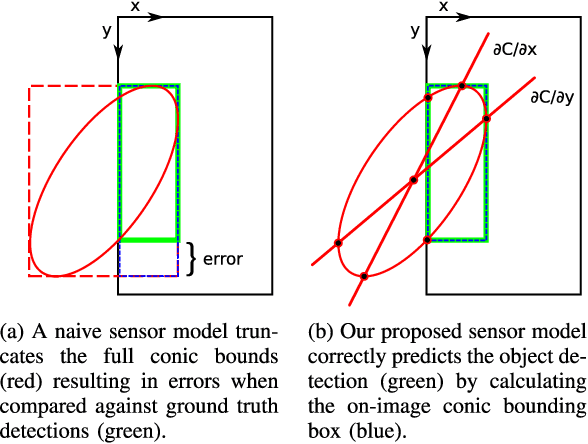
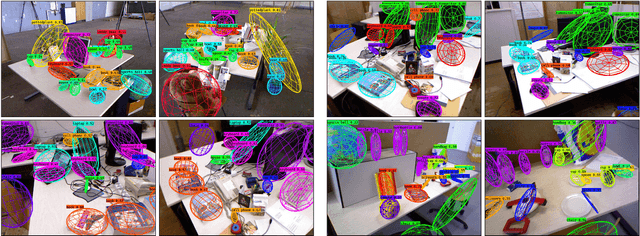

In this paper, we use 2D object detections from multiple views to simultaneously estimate a 3D quadric surface for each object and localize the camera position. We derive a SLAM formulation that uses dual quadrics as 3D landmark representations, exploiting their ability to compactly represent the size, position and orientation of an object, and show how 2D object detections can directly constrain the quadric parameters via a novel geometric error formulation. We develop a sensor model for object detectors that addresses the challenge of partially visible objects, and demonstrate how to jointly estimate the camera pose and constrained dual quadric parameters in factor graph based SLAM with a general perspective camera.
Dropout Sampling for Robust Object Detection in Open-Set Conditions
Apr 18, 2018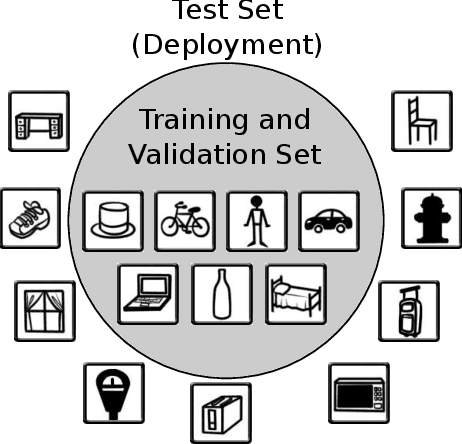
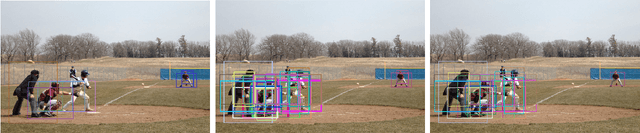
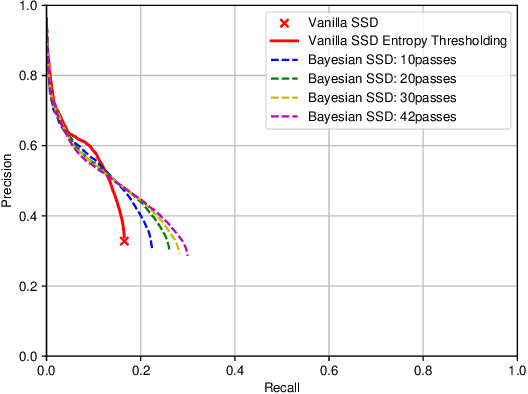
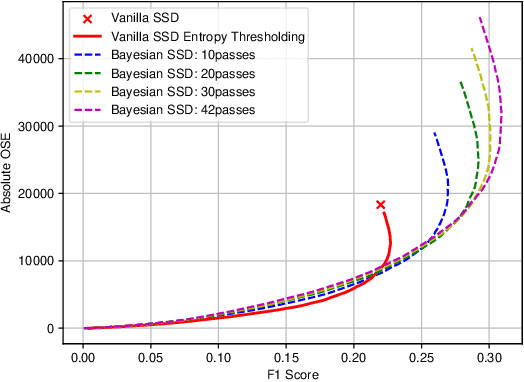
Dropout Variational Inference, or Dropout Sampling, has been recently proposed as an approximation technique for Bayesian Deep Learning and evaluated for image classification and regression tasks. This paper investigates the utility of Dropout Sampling for object detection for the first time. We demonstrate how label uncertainty can be extracted from a state-of-the-art object detection system via Dropout Sampling. We evaluate this approach on a large synthetic dataset of 30,000 images, and a real-world dataset captured by a mobile robot in a versatile campus environment. We show that this uncertainty can be utilized to increase object detection performance under the open-set conditions that are typically encountered in robotic vision. A Dropout Sampling network is shown to achieve a 12.3% increase in recall (for the same precision score as a standard network) and a 15.1% increase in precision (for the same recall score as the standard network).
The ACRV Picking Benchmark : A Robotic Shelf Picking Benchmark to Foster Reproducible Research
Dec 14, 2016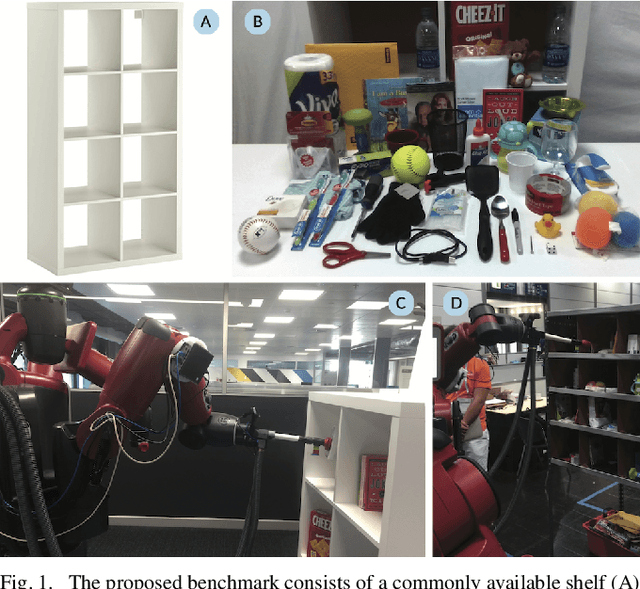
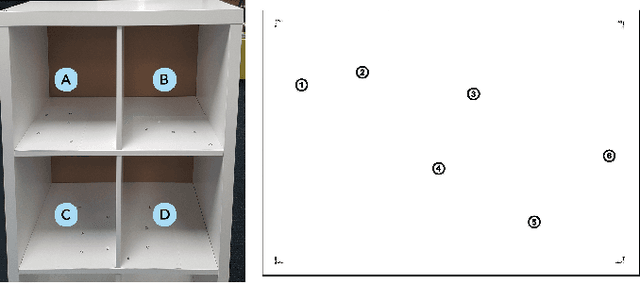

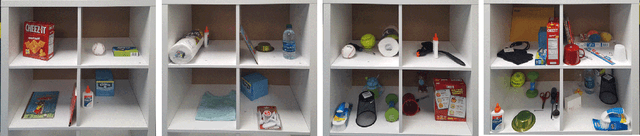
Robotic challenges like the Amazon Picking Challenge (APC) or the DARPA Challenges are an established and important way to drive scientific progress. They make research comparable on a well-defined benchmark with equal test conditions for all participants. However, such challenge events occur only occasionally, are limited to a small number of contestants, and the test conditions are very difficult to replicate after the main event. We present a new physical benchmark challenge for robotic picking: the ACRV Picking Benchmark (APB). Designed to be reproducible, it consists of a set of 42 common objects, a widely available shelf, and exact guidelines for object arrangement using stencils. A well-defined evaluation protocol enables the comparison of \emph{complete} robotic systems -- including perception and manipulation -- instead of sub-systems only. Our paper also describes and reports results achieved by an open baseline system based on a Baxter robot.