 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDROID: A Large-Scale In-The-Wild Robot Manipulation Dataset
Mar 19, 2024



The creation of large, diverse, high-quality robot manipulation datasets is an important stepping stone on the path toward more capable and robust robotic manipulation policies. However, creating such datasets is challenging: collecting robot manipulation data in diverse environments poses logistical and safety challenges and requires substantial investments in hardware and human labour. As a result, even the most general robot manipulation policies today are mostly trained on data collected in a small number of environments with limited scene and task diversity. In this work, we introduce DROID (Distributed Robot Interaction Dataset), a diverse robot manipulation dataset with 76k demonstration trajectories or 350 hours of interaction data, collected across 564 scenes and 84 tasks by 50 data collectors in North America, Asia, and Europe over the course of 12 months. We demonstrate that training with DROID leads to policies with higher performance and improved generalization ability. We open source the full dataset, policy learning code, and a detailed guide for reproducing our robot hardware setup.
3D Radar Velocity Maps for Uncertain Dynamic Environments
Jul 23, 2021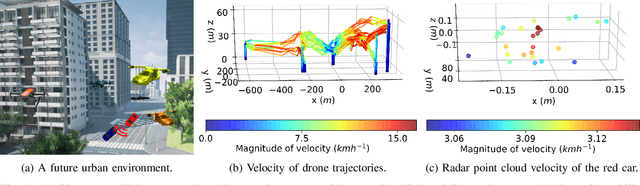
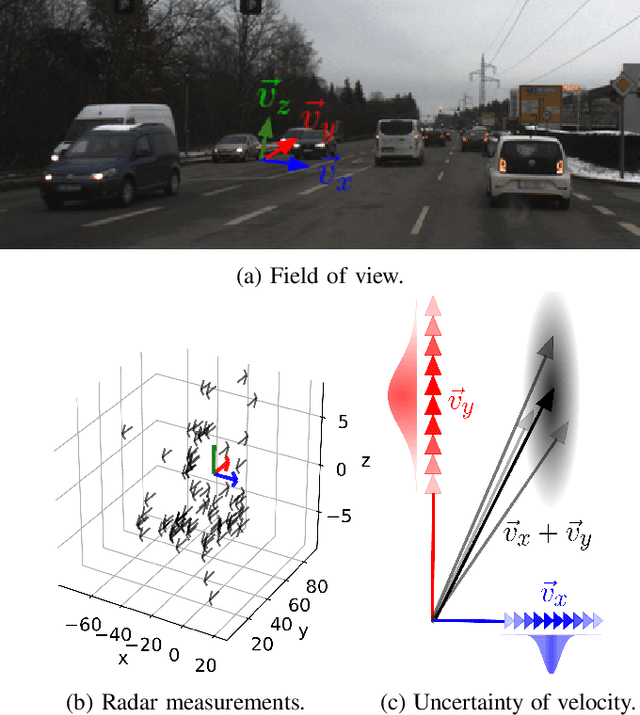
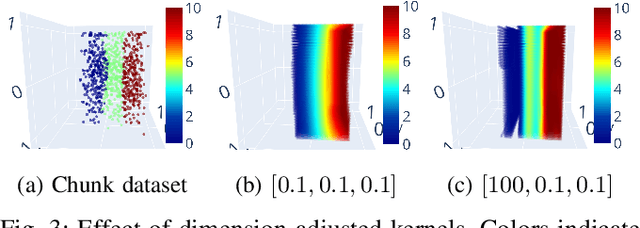
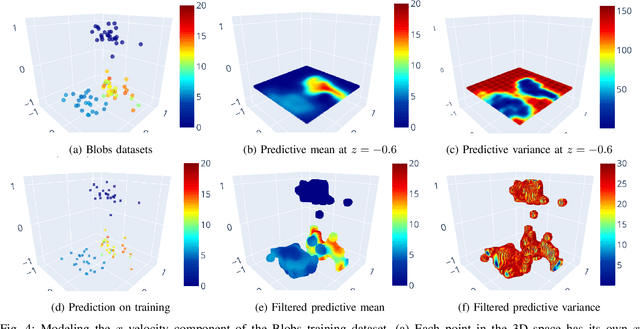
Future urban transportation concepts include a mixture of ground and air vehicles with varying degrees of autonomy in a congested environment. In such dynamic environments, occupancy maps alone are not sufficient for safe path planning. Safe and efficient transportation requires reasoning about the 3D flow of traffic and properly modeling uncertainty. Several different approaches can be taken for developing 3D velocity maps. This paper explores a Bayesian approach that captures our uncertainty in the map given training data. The approach involves projecting spatial coordinates into a high-dimensional feature space and then applying Bayesian linear regression to make predictions and quantify uncertainty in our estimates. On a collection of air and ground datasets, we demonstrate that this approach is effective and more scalable than several alternative approaches.