 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrototype-Regularized Federated Learning for Cross-Domain Aspect Sentiment Triplet Extraction
Apr 10, 2026Aspect Sentiment Triplet Extraction (ASTE) aims to extract all sentiment triplets of aspect terms, opinion terms, and sentiment polarities from a sentence. Existing methods are typically trained on individual datasets in isolation, failing to jointly capture the common feature representations shared across domains. Moreover, data privacy constraints prevent centralized data aggregation. To address these challenges, we propose Prototype-based Cross-Domain Span Prototype extraction (PCD-SpanProto), a prototype-regularized federated learning framework to enable distributed clients to exchange class-level prototypes instead of full model parameters. Specifically, we design a weighted performance-aware aggregation strategy and a contrastive regularization module to improve the global prototype under domain heterogeneity and the promotion between intra-class compactness and inter-class separability across clients. Extensive experiments on four ASTE datasets demonstrate that our method outperforms baselines and reduces communication costs, validating the effectiveness of prototype-based cross-domain knowledge transfer.
LLM-assisted Semantic Option Discovery for Facilitating Adaptive Deep Reinforcement Learning
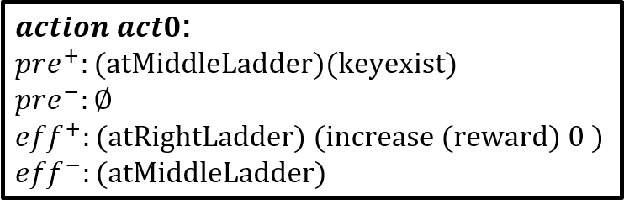
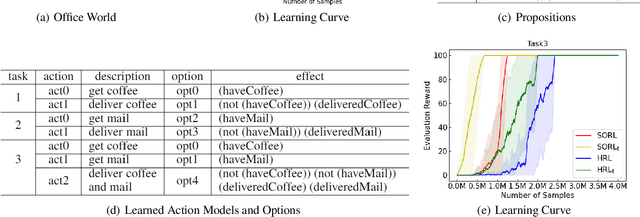
Mar 02, 2026Despite achieving remarkable success in complex tasks, Deep Reinforcement Learning (DRL) is still suffering from critical issues in practical applications, such as low data efficiency, lack of interpretability, and limited cross-environment transferability. However, the learned policy generating actions based on states are sensitive to the environmental changes, struggling to guarantee behavioral safety and compliance. Recent research shows that integrating Large Language Models (LLMs) with symbolic planning is promising in addressing these challenges. Inspired by this, we introduce a novel LLM-driven closed-loop framework, which enables semantic-driven skill reuse and real-time constraint monitoring by mapping natural language instructions into executable rules and semantically annotating automatically created options. The proposed approach utilizes the general knowledge of LLMs to facilitate exploration efficiency and adapt to transferable options for similar environments, and provides inherent interpretability through semantic annotations. To validate the effectiveness of this framework, we conduct experiments on two domains, Office World and Montezuma's Revenge, respectively. The results demonstrate superior performance in data efficiency, constraint compliance, and cross-task transferability.
Planning with Logical Graph-based Language Model for Instruction Generation
Aug 26, 2023Despite the superior performance of large language models to generate natural language texts, it is hard to generate texts with correct logic according to a given task, due to the difficulties for neural models to capture implied rules from free-form texts. In this paper, we propose a novel graph-based language model, Logical-GLM, to infuse logic into language models for more valid text generation and interpretability. Specifically, we first capture information from natural language instructions and construct logical bayes graphs that generally describe domains. Next, we generate logical skeletons to guide language model training, infusing domain knowledge into language models. Finally, we alternately optimize the searching policy of graphs and language models until convergence. The experimental results show that Logical-GLM is both effective and efficient compared with traditional language models, despite using smaller-scale training data and fewer parameters. Our approach can generate instructional texts with more correct logic owing to the internalized domain knowledge. Moreover, the usage of logical graphs reflects the inner mechanism of the language models, which improves the interpretability of black-box models.
Sequential Condition Evolved Interaction Knowledge Graph for Traditional Chinese Medicine Recommendation
May 29, 2023



Traditional Chinese Medicine (TCM) has a rich history of utilizing natural herbs to treat a diversity of illnesses. In practice, TCM diagnosis and treatment are highly personalized and organically holistic, requiring comprehensive consideration of the patient's state and symptoms over time. However, existing TCM recommendation approaches overlook the changes in patient status and only explore potential patterns between symptoms and prescriptions. In this paper, we propose a novel Sequential Condition Evolved Interaction Knowledge Graph (SCEIKG), a framework that treats the model as a sequential prescription-making problem by considering the dynamics of the patient's condition across multiple visits. In addition, we incorporate an interaction knowledge graph to enhance the accuracy of recommendations by considering the interactions between different herbs and the patient's condition. Experimental results on a real-world dataset demonstrate that our approach outperforms existing TCM recommendation methods, achieving state-of-the-art performance.
A Hierarchical Temporal Planning-Based Approach for Dynamic Hoist Scheduling Problems
Dec 11, 2022Hoist scheduling has become a bottleneck in electroplating industry applications with the development of autonomous devices. Although there are a few approaches proposed to target at the challenging problem, they generally cannot scale to large-scale scheduling problems. In this paper, we formulate the hoist scheduling problem as a new temporal planning problem in the form of adapted PDDL, and propose a novel hierarchical temporal planning approach to efficiently solve the scheduling problem. Additionally, we provide a collection of real-life benchmark instances that can be used to evaluate solution methods for the problem. We exhibit that the proposed approach is able to efficiently find solutions of high quality for large-scale real-life benchmark instances, with comparison to state-of-the-art baselines.
Learning Visual Planning Models from Partially Observed Images
Nov 25, 2022



There has been increasing attention on planning model learning in classical planning. Most existing approaches, however, focus on learning planning models from structured data in symbolic representations. It is often difficult to obtain such structured data in real-world scenarios. Although a number of approaches have been developed for learning planning models from fully observed unstructured data (e.g., images), in many scenarios raw observations are often incomplete. In this paper, we provide a novel framework, \aType{Recplan}, for learning a transition model from partially observed raw image traces. More specifically, by considering the preceding and subsequent images in a trace, we learn the latent state representations of raw observations and then build a transition model based on such representations. Additionally, we propose a neural-network-based approach to learn a heuristic model that estimates the distance toward a given goal observation. Based on the learned transition model and heuristic model, we implement a classical planner for images. We exhibit empirically that our approach is more effective than a state-of-the-art approach of learning visual planning models in the environment with incomplete observations.
Text-Based Action-Model Acquisition for Planning
Feb 18, 2022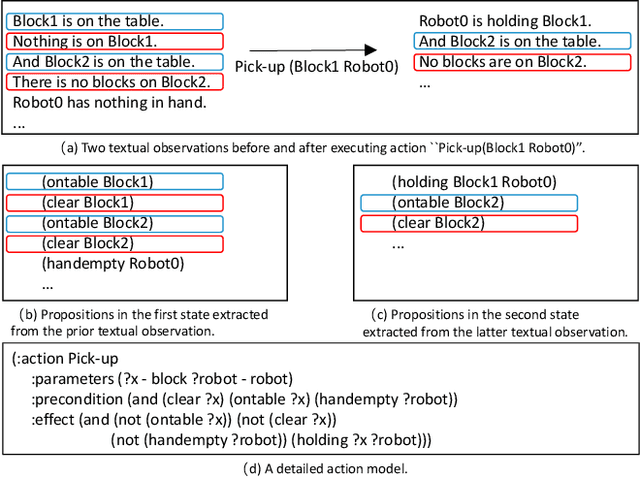
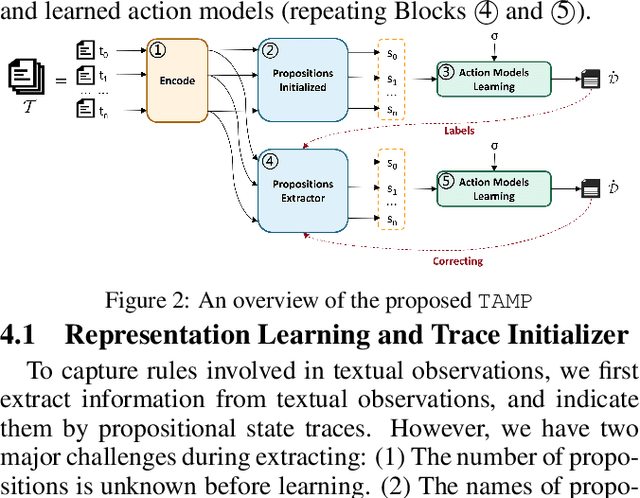

Although there have been approaches that are capable of learning action models from plan traces, there is no work on learning action models from textual observations, which is pervasive and much easier to collect from real-world applications compared to plan traces. In this paper we propose a novel approach to learning action models from natural language texts by integrating Constraint Satisfaction and Natural Language Processing techniques. Specifically, we first build a novel language model to extract plan traces from texts, and then build a set of constraints to generate action models based on the extracted plan traces. After that, we iteratively improve the language model and constraints until we achieve the convergent language model and action models. We empirically exhibit that our approach is both effective and efficient.
Integrating AI Planning with Natural Language Processing: A Combination of Explicit and Tacit Knowledge
Feb 15, 2022Automated planning focuses on strategies, building domain models and synthesizing plans to transit initial states to goals. Natural language processing concerns with the interactions between agents and human language, especially processing and analyzing large amounts of natural language data. These two fields have abilities to generate explicit knowledge, e.g., preconditions and effects of action models, and learn from tacit knowledge, e.g., neural models, respectively. Integrating AI planning and natural language processing effectively improves the communication between human and intelligent agents. This paper outlines the commons and relations between AI planning and natural language processing, argues that each of them can effectively impact on the other one by four areas: (1) planning-based text understanding, (2) planning-based text generation, (3) text-based human-robot interaction, and (4) text-based explainable planning. We also explore some potential future issues between AI planning and natural language processing.
Creativity of AI: Automatic Symbolic Option Discovery for Facilitating Deep Reinforcement Learning
Dec 18, 2021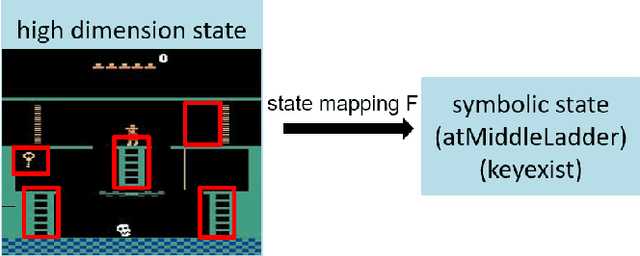

Despite of achieving great success in real life, Deep Reinforcement Learning (DRL) is still suffering from three critical issues, which are data efficiency, lack of the interpretability and transferability. Recent research shows that embedding symbolic knowledge into DRL is promising in addressing those challenges. Inspired by this, we introduce a novel deep reinforcement learning framework with symbolic options. This framework features a loop training procedure, which enables guiding the improvement of policy by planning with action models and symbolic options learned from interactive trajectories automatically. The learned symbolic options alleviate the dense requirement of expert domain knowledge and provide inherent interpretability of policies. Moreover, the transferability and data efficiency can be further improved by planning with the action models. To validate the effectiveness of this framework, we conduct experiments on two domains, Montezuma's Revenge and Office World, respectively. The results demonstrate the comparable performance, improved data efficiency, interpretability and transferability.
Retrosynthetic Planning with Experience-Guided Monte Carlo Tree Search
Dec 11, 2021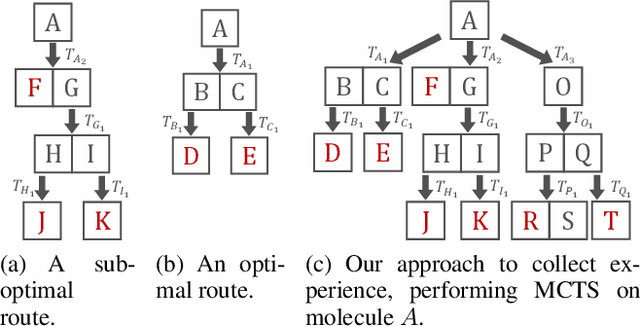
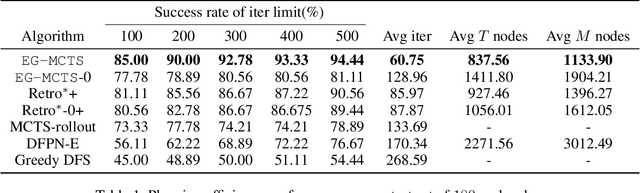
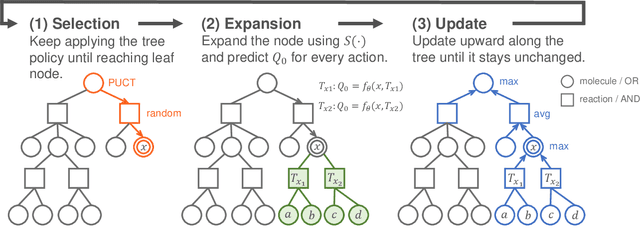
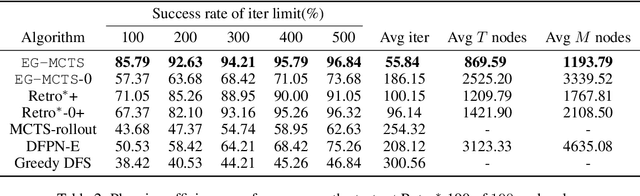
Retrosynthetic planning problem is to analyze a complex molecule and give a synthetic route using simple building blocks. The huge number of chemical reactions leads to a combinatorial explosion of possibilities, and even the experienced chemists could not select the most promising transformations. The current approaches rely on human-defined or machine-trained score functions which have limited chemical knowledge or use expensive estimation methods such as rollout to guide the search. In this paper, we propose {\tt MCTS}, a novel MCTS-based retrosynthetic planning approach, to deal with retrosynthetic planning problem. Instead of exploiting rollout, we build an Experience Guidance Network to learn knowledge from synthetic experiences during the search. Experiments on benchmark USPTO datasets show that, our {\tt MCTS} gains significant improvement over state-of-the-art approaches both in efficiency and effectiveness.